自动驾驶避人避车,第12期讲透感知逻辑
自动驾驶不是会开车的神仙,很多车企把辅助驾驶包装得像老司机附体,我反而更想替消费者问一句:它到底是看见了行人,还是只是猜中了像素里的影子?在城市道路、隧道口、雨雾天这些真实工况里,系统一旦看错,轻则一脚急刹把全车人吓醒,重则把本该避开的行人、车辆判断得含含糊糊。长脑子快的方式,就是把这些汽车知识掰开揉碎看。今天聊自动驾驶,欢迎来到汽车知识扫盲第12期,咱们不吹玄学,只讲它怎么识别路上的行人和车辆。
 车身周围传感器感知示意
车身周围传感器感知示意
01.
摄像头像眼睛,但AI看到的不是世界
在正常白天道路条件下,工程师一开始想得很直接:模仿人类,给车装上“眼睛”——摄像头。听起来很顺,车像人一样看路,看到前车就跟车,看到行人就刹停,看到车道线就保持方向。
可问题来了,我们人眼看到模糊的画面能自动脑补,可AI眼里的世界只是一堆像素点,他分不清哪是车哪是人。你在路口远远看到一个黑影,脑子会结合经验判断那可能是骑车人、垃圾桶,或者一条突然窜出来的狗;但早期系统面对同样画面,更像盯着马赛克考试,既紧张又没底。
 车内辅助驾驶界面显示周围环境
车内辅助驾驶界面显示周围环境
所以工程师只能用数百万张标注好的图片给AI填鸭式补习,硬让它记住“四个轮子带壳子的就是车”。在我看来,这个过程就像把小孩按在题库前反复刷题:见得多了,确实能认出轿车、SUV、卡车,但现实路况不是标准考卷。逆光、雨水、施工围挡、路边反光牌,全都可能让它犯迷糊。
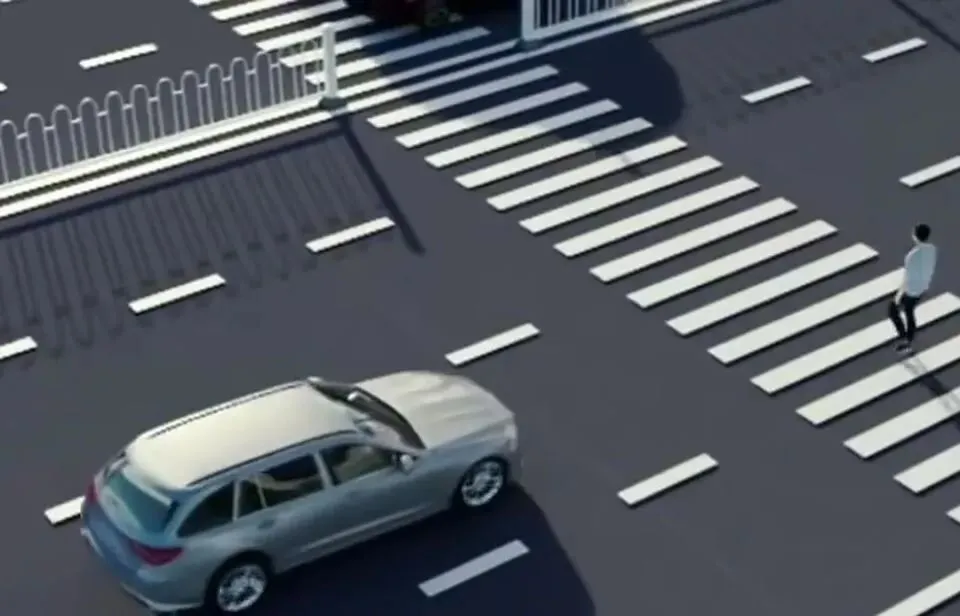 车辆接近斑马线行人的识别场景
车辆接近斑马线行人的识别场景
02.
激光雷达很强,但它也不是万能保镖
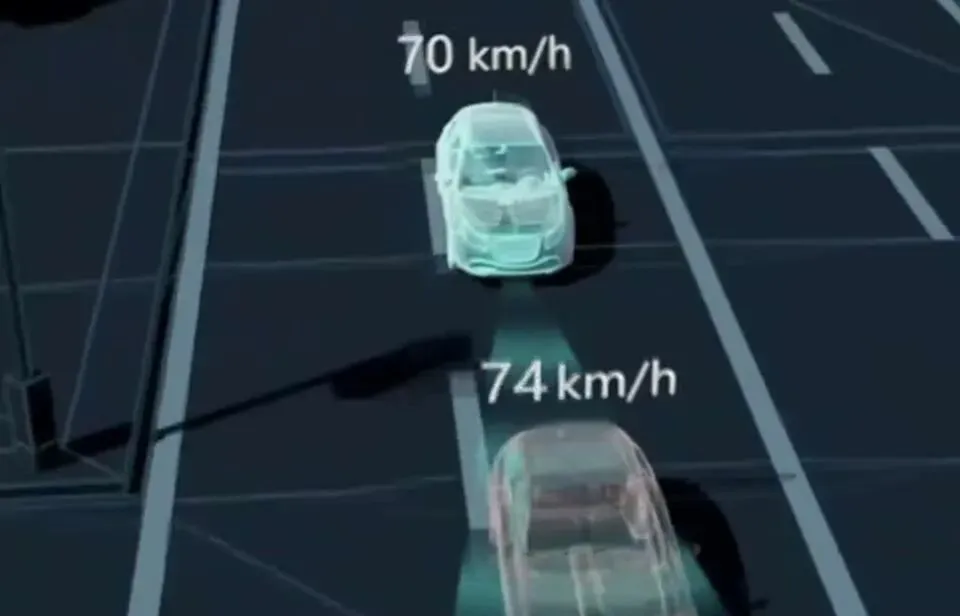
在识别距离这件事上,光靠摄像头是不够的。开车不只要知道“前面是人”,还得知道“离我多远、移动得多快、会不会突然进入车道”。于是救兵来了:激光雷达。
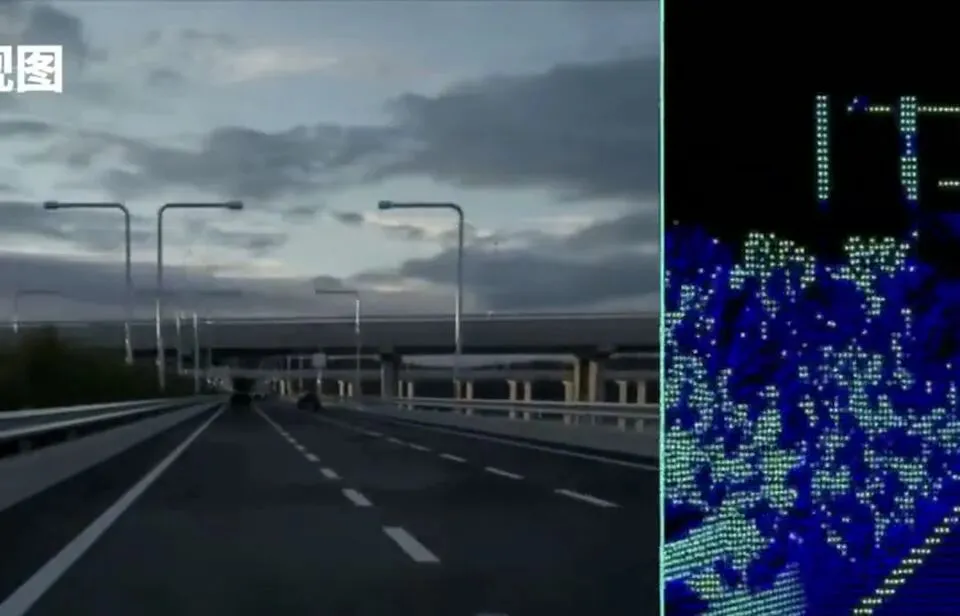
它像个超级精确的“瞎子”,通过发射激光束并计算反射时间,测出每个点的距离,把周围环境扫描成一幅细致的点云图。说人话,就是你开车经过路口时,它能把护栏、车辆、行人、路边凸起物,都变成一团团有远近关系的空间点。
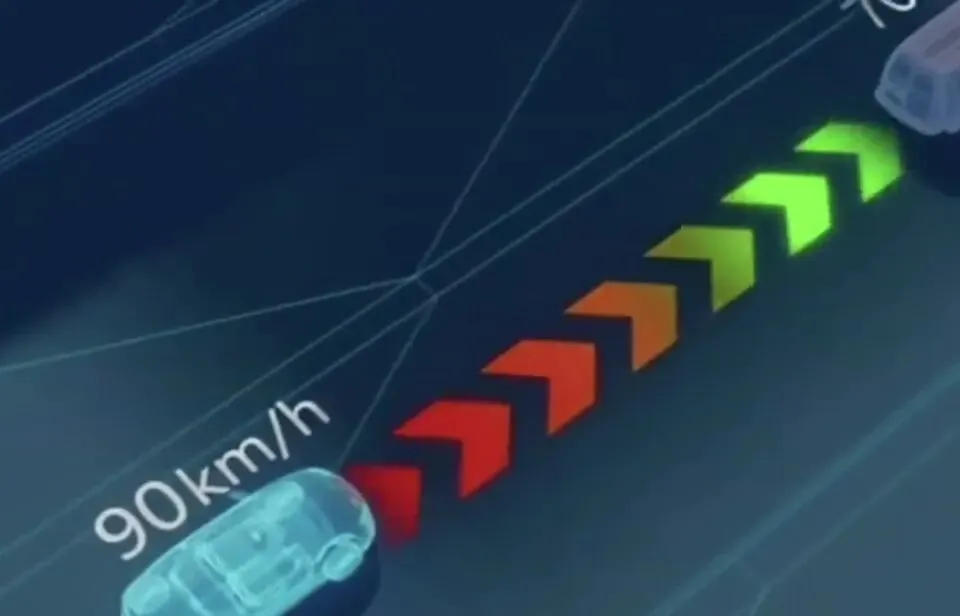 激光雷达测距原理示意图
激光雷达测距原理示意图
但槽点也在这里。它只知道那里有个东西,却不知道那到底是什么。在测试条件比较复杂的城市路段里,它能告诉系统前方有障碍物,可这个障碍物是行人、纸箱、影子边缘,还是路边临时摆放的锥桶,仍然要靠别的感知来补课。
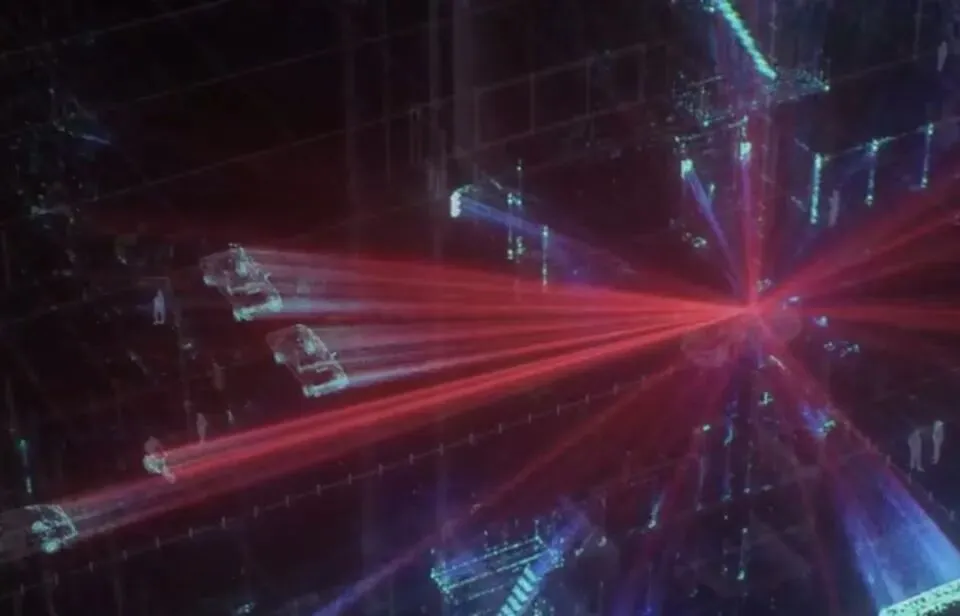 激光雷达生成的点云环境图
激光雷达生成的点云环境图
这就是消费者容易被宣传带偏的地方。某些车上了激光雷达,就被讲得像多装了保险柜。说实话,传感器多当然能提升安全感,但不是“装了就稳”。如果算法融合做得不细,硬件堆得再热闹,也可能像一桌人同时报路况,声音很大,结论却不统一。
03.
摄像头和雷达吵架,幽灵刹车就来了
在日常高架、环路、城市快速路这种场景里,摄像头和激光雷达结合起来,一个负责看清是啥,一个负责测量多远,这套逻辑听着很合理。可真实车流里,麻烦恰恰出在“谁说了算”。
雷达说前面有障碍,摄像头说那是影子,系统听谁的?判断失误,轻一点就是幽灵刹车。你正跟着车流走,前方明明没车突然一脚制动,后排乘客的咖啡差点起飞,后车司机也被吓得赶紧点刹,这种体验,谁遇到谁知道。
 摄像头画面与激光雷达点云融合
摄像头画面与激光雷达点云融合
更麻烦的是,早期系统离不开高精地图当保姆。结果就是被锁死在了高速上,一旦下了它熟悉的路段,来到没有精细地图覆盖的城区、小路、临时改道,它就像离开导航不会走路的新手。看都这么难,想就更僵化了。
在我看来,消费者买带辅助驾驶的车,真正该问的不是“传感器有几个”,而是“遇到传感器互相打架时,系统怎么裁判”。你更在意硬件堆料带来的安全感,还是算法在复杂路口里的稳定判断?如果只能选一个,我个人会更偏向后者,因为每天通勤里,稳定少吓人比参数好看更重要。
 传感器冲突导致幽灵刹车的场景
传感器冲突导致幽灵刹车的场景
04.
早期规则像死背题库,遇到鬼探头就露怯
在封闭道路或清晰车道线工况下,早期决策系统看起来挺像样,但它本质上全靠工程师编写无数条“如果什么什么,就怎么做”。比如前车减速就跟着减速,车道线消失就降低置信度,障碍物出现就准备制动。
这套东西的问题很现实:它像死背题库,考到原题很稳,题目一变就发懵。一旦遇到加塞、鬼探头、施工临时变道,或者前车突然绕开一个掉落物,它要么反应慢半拍,要么做出特别僵硬的判断。坐在车里的人会明显感觉到:方向盘动作不够像人,刹车也不像有经验的司机那样留余量。
 早期系统依赖规则进行判断
早期系统依赖规则进行判断
所以我一直不太喜欢把辅助驾驶说成“老司机”。老司机会看人,会预判,会从路边电动车的姿态里猜它下一秒要不要抢道;规则系统更多是“看到结果才反应”。这个差别,放在空旷道路上不明显,放到早晚高峰的城区里,就很容易露出来。
05.
Transformer和鸟瞰图,让车开始看全局
转机出现在AI学会自己理解世界。Transformer这类模型,让系统获得了一眼看懂全局的能力。基于它发展的鸟瞰图技术,能把摄像头、雷达等信息融合成一个类似上帝视角的立体沙盘。
 AI模型理解城市道路全局关系
AI模型理解城市道路全局关系
这件事放到真实开车里很好理解。你在路口左转,不会只盯着正前方,还会同时看对向车、斑马线行人、右侧电动车、路边可能开门的车。鸟瞰图的价值就在这儿:它不再只盯一个点,而是把周围交通参与者放进同一张空间图里判断。
 鸟瞰图感知把道路信息整合成空间视角
鸟瞰图感知把道路信息整合成空间视角
更妙的是,占用网格思路不再纠结识别每个物体叫什么,只判断空间格子有没有被占。说白了,不管路上是奇奇怪怪的纸箱、倒下的锥桶,还是没见过的异形障碍,只要那个格子被占了,车就知道要绕开或减速。简单来说,就是“二郎神开天眼”了。
这确实是辅助驾驶从“认物体”走向“理解空间”的关键变化。可我也得泼点冷水:理解空间不等于理解人性。路边行人突然回头、电动车斜着钻、前车犹豫不决,这些依然是很难的题。
06.
端到端很热,但别把它当许愿池
光看清世界还不够,思考仍是硬伤。于是行业走到了今天很关键的一步:端到端大模型不再教AI具体规则,而是直接喂给它海量人类开车视频,让它自己从数据里总结规律,从传感器信号直接输出驾驶动作。
这个逻辑像一个疯狂刷题后形成直觉的老司机。它不再只是“如果前面有车就刹”,而是学人类司机在不同路况下怎么跟车、怎么避让、怎么选择路线。在理想条件下,它的动作会更连贯,不会像早期系统那样一顿一顿。
但现在行业分成两派。一派是端到端视觉,像人一样靠摄像头和强大算法来脑补世界,成本低,但雨雾天容易“失明”;另一派是多数传感器融合方案,激光雷达等硬件一起上,像给车配上蝙蝠的回声定位,安全感更高,但成本也高。
消费者真正要算的账,是这套辅助驾驶在你的用车场景里值不值。如果你常跑城市复杂路况、雨雾天气也多,我个人会更看重融合感知的冗余;如果你预算敏感,主要在光线清楚、道路规范的环境里通勤,强算法的视觉方案也有它的吸引力。
这类技术适合愿意理解边界、把辅助驾驶当助手的人;不适合把方向盘交出去就开始分心的人。我的购买建议也很直接:别只听销售讲“能开多远”,要试它在匝道、路口、加塞、阴影、雨天这些场景下怎么处理。你会选成本更低的纯视觉派,还是安全感更足的融合感知派?对了,价格和权益还是以官方发布时为准,各地可能不一样。

