99%场景都能过,但舒适度输了!自动驾驶规划大赛冠军策略深度拆解
- 2026-07-15 10:32:46
自动驾驶开发者,你是否还在为“安全”与“高效”的永恒矛盾而头疼?一套算法在空旷高速上表现完美,一到复杂路口就“怂”成乌龟。另一套算法交互激进,却又在舒适度上丢分。2024年CommonRoad规划大赛的冠军方案,用一套“双脑”协同的博弈论策略,给出了一个令人惊艳的解法:牺牲少量“最优解”质量,换取覆盖99%以上复杂场景的超强鲁棒性。 读完本文,你将彻底掌握这套顶级规划器的核心架构与博弈精髓。
❓ 为什么自动驾驶规划总是“顾此失彼”?
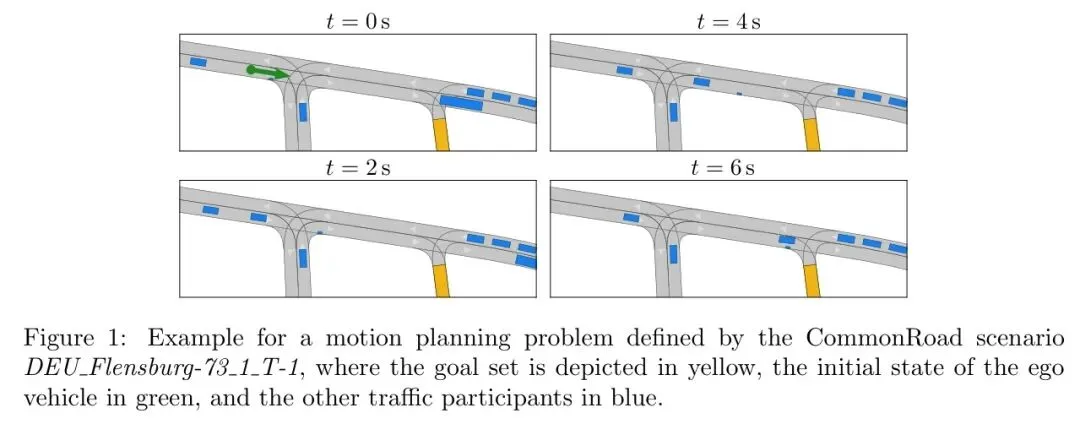
想象一下,你的自动驾驶汽车正在一个无信号灯的十字路口。左边有车跃跃欲试,右边有车缓慢逼近。一个完美的规划器需要同时做到:
1. 绝对安全:绝不能发生碰撞。 2. 高效通行:不能无谓等待,阻碍交通流。 3. 乘坐舒适:加减速、转向必须平滑。 4. 遵守交规:保持安全距离、不压线。
然而,现实很骨感。追求极致的舒适与效率(如基于优化的方法),往往在密集交互的复杂路口因计算复杂而“超时”或过于保守;而追求快速反应与高通过率(如基于采样的方法),又常常在轨迹平滑度和规则遵守上做出妥协。
这就是当前自动驾驶运动规划的核心困境:单一策略的规划器,难以在“覆盖率”(能解决多少场景)和“解决方案质量”(解有多好)之间取得完美平衡。 2024年CommonRoad大赛的结果,将这一矛盾赤裸裸地呈现了出来。
但为什么冠军团队能打破这个僵局?关键在于他们摒弃了“一招鲜吃遍天”的思路,转向了一种模块化、场景自适应的“双脑”架构。
为了帮你快速把握冠军方案的全局脉络,我们先看这张核心架构思维导图——它清晰地揭示了“反应式规划”与“博弈论规划”如何根据场景智能切换,协同作战。
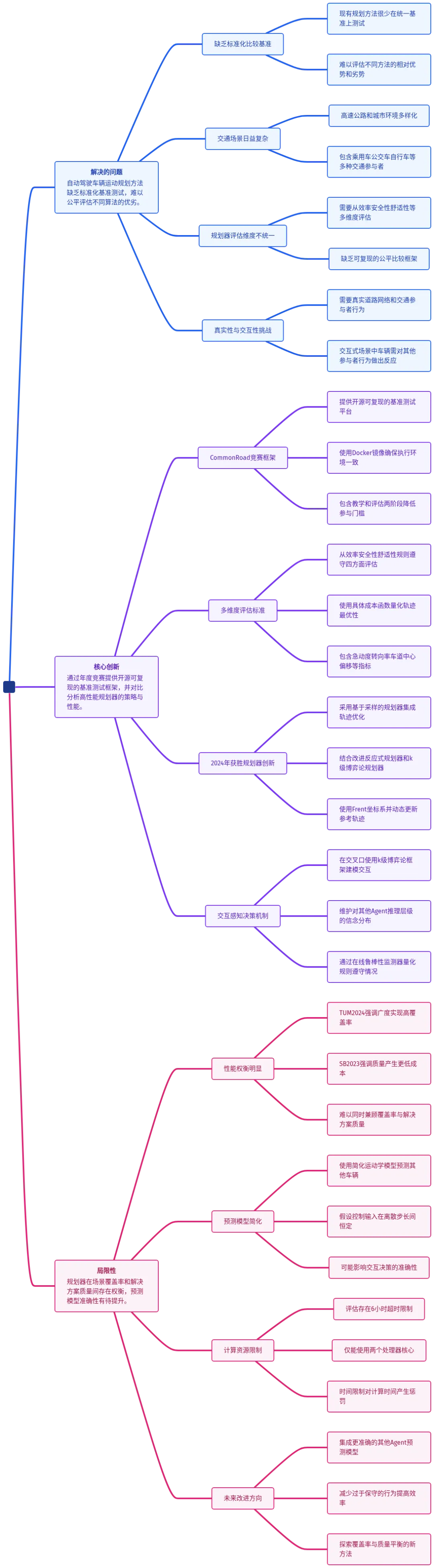
接下来,我们逐层拆解这张图中的每个关键模块,看看它如何做到“既要、又要、还要”。
🚀 “双脑”协同的博弈论规划器
冠军方案的精髓,在于它不是一个单一的规划器,而是一个智能调度系统。它包含两个核心模块:
1. 改进的反应式规划器 (Reactive Planner):负责处理大多数常规道路场景(如跟车、变道、巡航),追求快速、鲁棒。 2. k级博弈论规划器 (Game-Theoretic Planner):专门用于攻克无信号交叉口这类高度耦合、需要深度交互推理的“地狱难度”场景。
系统会根据实时场景特征(如是否接近复杂路口)自动选择合适的“大脑”进行决策。下面,我们打开这两个“大脑”的黑盒。
💡 模块一:快反大脑(反应式规划器)
这个模块建立在 Frenét坐标系 中。简单理解,就是把复杂的二维道路环境,“拍扁”成沿着参考车道中心线(纵向)和垂直于它(横向)的两个一维问题。这大大简化了轨迹生成和碰撞检测。
它的工作流程就像一位高效的“轨迹采样师”:
• 输入:自车状态、预测的他车轨迹、一条由全局路径规划器生成的参考线。 • 过程:在时空网格中,用五次多项式采样生成一系列横向和纵向的候选轨迹。 • 评估:用可行驶性检查器快速过滤掉会碰撞或动力学不可行的轨迹。 • 决策:在剩下的安全轨迹中,选择一个综合成本最小的。
这里的**成本函数**是评估“好坏”的核心标尺,包含四个维度:
• (急动度成本):惩罚加速度的变化率 ,追求平顺的加减速。 • (转向率成本):惩罚方向盘转动速度 ,追求柔和的转向。 • (障碍物距离成本):鼓励与周围车辆保持安全距离。距离越近,成本指数级增长()。 • (车道中心偏移成本):惩罚车辆偏离车道中心线 ,鼓励规整行驶。
权重向量 透露了设计者的优先级:将转向平滑和安全距离放在最重要的位置,其次是保持车道,最后是纵向平顺性。
💡 实战思考:这个反应式规划器就像一个基本功扎实的“老司机”,在结构化道路上处理常规驾驶游刃有余。但它的局限性在于,假设其他车辆的行为是固定的(非交互预测)。在十字路口,大家互相“揣摩”意图时,这套假设就失效了。
💡 模块二:博弈大脑(k级规划器)
当系统识别到车辆接近无信号交叉口时,就会切换到“博弈大脑”。这里的核心思想是:我不再假设你知道我要干嘛,而是尝试去“读心”,并基于你的可能反应来制定我的策略。
这引入了 k级博弈论 框架。这里的“k”代表推理深度:
• Level-0 (天真实用主义者):只考虑自己,以最短路径/最快速度冲向目标,完全无视他人。 • Level-1 (初级读心者):认为其他所有人都是Level-0,然后根据预测的他们的“自私”行为,来优化自己的路线。 • Level-2 (高级读心者):认为其他所有人都是Level-1,即他们认为我是Level-0,并据此行动,我再反过来制定策略。
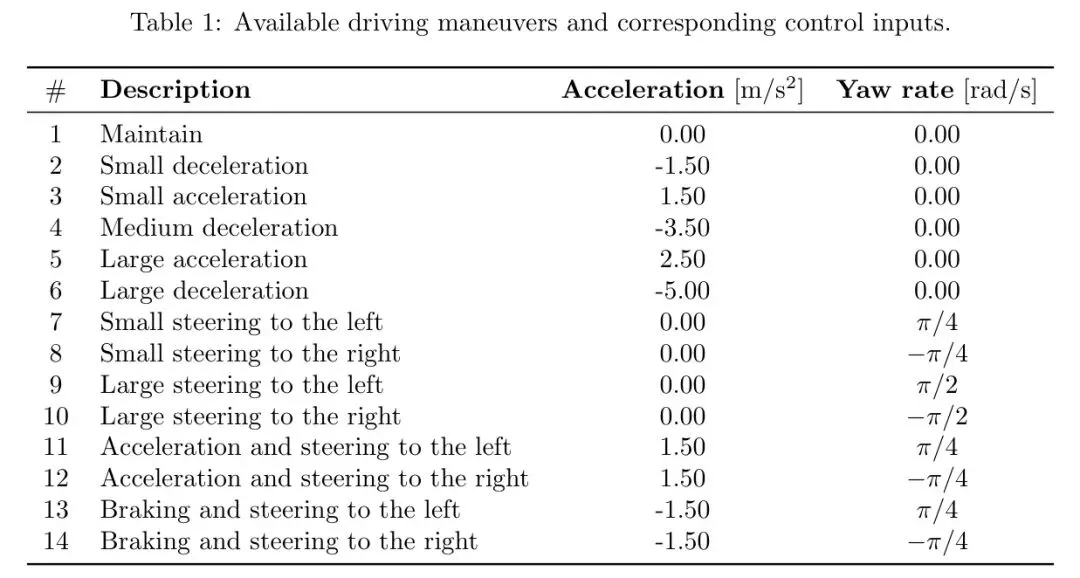
冠军方案为自车定义了如表1所示的离散动作空间,包含跟车、巡航、左转等基本机动。
规划器的决策过程充满智慧:
1. 信念初始化:自车对周围每个车辆都有一个“信念分布”,即认为它是Level-0、1、2的概率各是多少。 2. 预期收益计算:对于自车的每一个候选动作序列,计算其期望累积奖励。这个奖励综合了到达目标、安全、舒适等多个因素。
公式的意思是:将自车动作在不同“对手”等级下的收益,按信念概率加权平均。这相当于考虑了所有可能的交互情况。
3. 动作选择:选择期望奖励最高的动作序列执行。 4. 信念实时更新:执行一步后,观察其他车的真实动作,与之前基于不同k级假设的预测进行对比。谁预测得最准,就增加对那个“k级”模型的信念。这是一个动态的学习过程。
这个设计的巧妙之处在于:它不需要知道对方真实的内在模型,而是通过外部行为反推,并自适应调整策略。在面对保守型司机(可能像Level-1)时,自车可以更果断;面对激进型司机(可能像Level-0)时,自车则会更防御。
看到这里,你是否觉得这种“读心术”式的规划打开了新思路?在实际项目中,你会如何对不同类型的交通参与者进行建模?欢迎在评论区分享你的见解!
📊 覆盖率与质量的经典权衡
理论很美妙,实战表现如何?组委会将2024年冠军(TUM-2024)与2023年冠军(SB-2023,一个结合了优化与可达性分析的方案)放在完全相同的360个交互式基准场景和相同的计算资源(双核,6小时限时) 下进行了一场“关公战秦琼”。
结果揭示了一个自动驾驶规划领域经典的、几乎不可避免的权衡(Trade-off)。
🏆 核心对决:广度 vs. 深度
让我们直接看最直观的对比图。下图清晰展示了两个规划器在不同地图场景下的性能分布。
结论一目了然:
• TUM-2024 (2024冠军,我们的“双脑”方案):广度之王。在严格的6小时计算限制内,成功解决了绝大多数场景,展现了惊人的鲁棒性和计算效率。它的点大量集中在图表右侧。 • SB-2023 (2023冠军,优化方案):质量之王。在它能够成功求解的那些场景中(图表左侧的点),其规划轨迹的综合成本(TR1)显著更低。这意味着在这些场景里,SB-2023规划的轨迹更舒适、更安全、更守规。
💡 这个结果意味着什么?对于量产落地而言,TUM-2024的策略可能更具吸引力。因为首先要保证系统在任何情况下都能给出一个安全可行的解(高覆盖率),避免车辆“僵住”。在此基础上,再去优化舒适性。而对于算法研究或特定封闭场景,SB-2023则展示了追求极致性能优化所能达到的高度。
🔬 架构图解:双脑如何运作?
冠军方案的强大覆盖率,离不开其清晰的架构分工。下图完美诠释了“反应式规划”与“博弈论规划”如何根据场景无缝衔接。
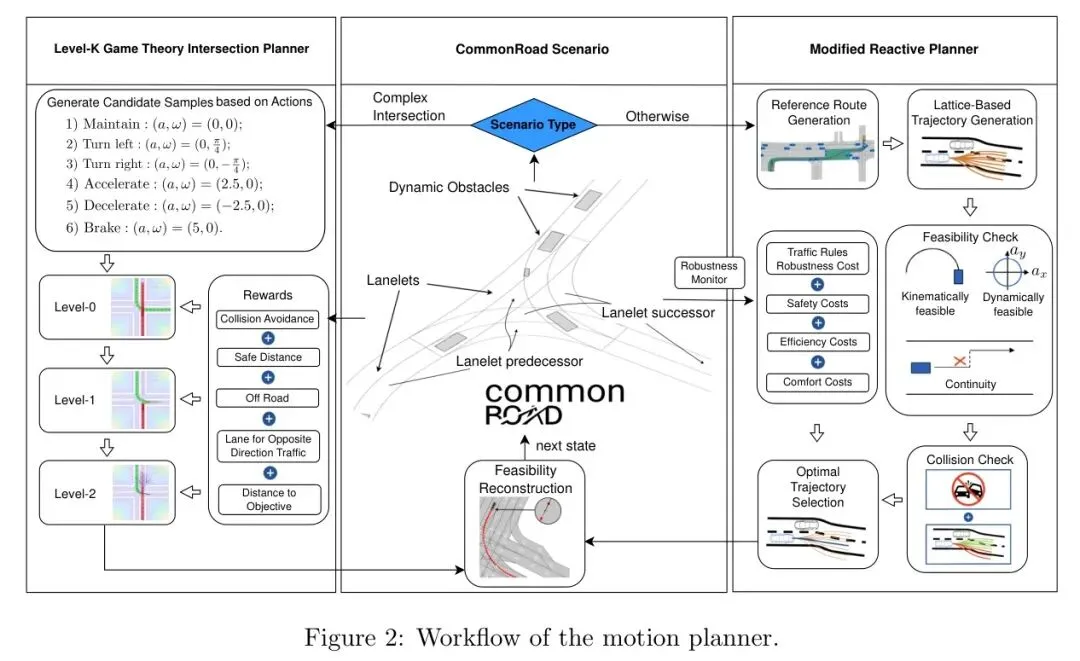
流程解读:
1. 场景识别:系统持续判断是否驶入无信号交叉口区域。 2. 常规道路:使用反应式规划器,基于Frenét坐标系采样和优化,快速生成轨迹。 3. 无信号交叉口:切换至博弈论规划器。首先进行基于运动学的短期轨迹预测,然后启动k级信念推理与决策循环,生成交互式轨迹。 4. 可行性保障:无论哪个模块生成的轨迹,最终都要经过严格的可行驶性检查器(检查碰撞、动力学、道路合规),并设有紧急制动作为最后的安全底牌。
⚖️ 冠军方案的启示与局限
优势与启示:
1. 场景化设计是王道:没有“万能算法”,但可以有“智能调度系统”。针对不同场景特性定制专用模块,是提升整体性能的有效路径。 2. 博弈论提供可解释交互:在高度不确定的交互场景中,k级博弈框架提供了一种结构化、可解释的决策方式,比黑盒学习模型更值得信赖。 3. 效率与鲁棒性优先:在有限计算资源下,优先保证“有解”和“快速”,符合实际车载系统的约束。
局限与改进方向:
1. 预测模型简化:方案使用了非常简化的运动学模型进行他车预测。在交叉口,他车意图(转向、让行)比运动学更关键。集成更精准的意图预测模型,是减少保守行为、进一步提升质量的关键。 2. 舒适度牺牲:为了高覆盖率,在复杂场景下可能不得不接受次优解,导致舒适度评分低于纯优化方法。这需要更精细的采样策略和优化技巧来弥补。 3. 信念更新策略:当前基于单步动作匹配的信念更新可能比较脆弱。如何设计更鲁棒、更长时的交互历史学习机制,是一个值得探索的方向。
🌟 价值总结与行动号召
回顾全文,2024年CommonRoad冠军方案给我们上了生动的一课:
• 🔧 模块化架构:用“反应式规划”处理常态,用“博弈论规划”攻克难关,1+1>2。 • 🧠 交互式推理:在不确定环境中,主动建模并推理他车意图(k级博弈),是安全高效通行的钥匙。 • ⚖️ 明确取舍:在资源受限的现实世界,覆盖率的优先级往往高于单一场景的极致优化。
这项技术不仅适用于自动驾驶,其“场景识别-模块调度”的核心思想,以及基于模型的交互推理框架,对机器人导航、多智能体协同等领域都有极强的借鉴意义。
🤔 深度思考:你认为这种“双脑”博弈规划策略,最可能率先在哪个自动驾驶场景中大规模落地?是城市RoboTaxi,还是高速物流卡车?欢迎在评论区留下你的观点!
💝 支持原创:如果这篇近4000字的深度拆解让你对自动驾驶规划有了新的认识,点赞+在看就是最好的支持!分享给你的技术伙伴,一起探讨!
🔔 关注提醒:关注我们,持续获取前沿AI技术的一手深度解读!
#AI技术 #自动驾驶 #运动规划 #博弈论 #技术干货 #论文解读
参考
Results of the 2024 CommonRoad Motion Planning Competition for Autonomous Vehicles

