自动驾驶技术的核心挑战之一,在于让车辆在复杂动态环境中快速、安全地完成运动规划。传统模型预测控制(MPC)虽能实现最优规划,但面对高度非线性的神经状态空间(NSS)车辆模型时,基于梯度的优化求解器不仅计算成本高昂,还常面临收敛难题。近期,Iman Askari等学者提出的模型预测推断控制(MPIC)框架,为这一痛点提供了颠覆性解决方案——将控制问题转化为贝叶斯状态估计问题,摆脱梯度优化依赖,让自动驾驶运动规划效率实现量级提升。
论文信息
题目:Model Predictive Inferential Control of Neural State-Space Models for Autonomous Vehicle Motion Planning
基于神经状态空间模型预测推断控制的自动驾驶汽车运动规划
作者:Iman Askari, Ali Vaziri, Xuemin Tu, Shen Zeng, Huazhen Fang
一、自动驾驶运动规划的核心困境
运动规划是自动驾驶的“决策中枢”,需要确定车辆从起始到目标的轨迹与机动动作,既要满足避障、道路边界、车辆物理限制等硬约束,又要兼顾跟踪精度、乘坐舒适性等多目标优化。
传统MPC方法以滚动时域优化为核心,虽能融合车辆动力学模型和约束条件,但当车辆动力学由神经状态空间(NSS)模型表示时,问题变得极具挑战:神经网络的高度非线性、非凸特性,让基于梯度的优化求解器(如IPOPT)计算量暴增,甚至在长预测视野(H=40、60)下难以收敛;即便勉强求解,也仅能得到局部最优解,且计算效率无法满足自动驾驶实时性要求。
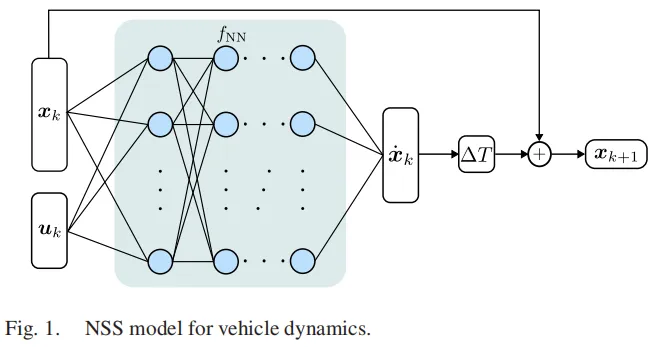 图1:神经状态空间(NSS)车辆模型结构示意。该模型通过神经网络捕捉车辆状态演化,虽形式简洁,却能精准表征复杂车辆动力学,但也带来了MPC优化的非线性难题。
图1:神经状态空间(NSS)车辆模型结构示意。该模型通过神经网络捕捉车辆状态演化,虽形式简洁,却能精准表征复杂车辆动力学,但也带来了MPC优化的非线性难题。
二、MPIC框架:从“优化”到“推断”的范式转变
论文的核心创新在于提出MPIC框架,彻底重构了自动驾驶运动规划的求解逻辑——不再依赖梯度优化,而是将MPC问题等价转化为贝叶斯状态估计(平滑)问题,通过“推断”而非“优化”生成最优控制决策。
1. 控制与估计的等价性证明
研究团队构建了一个虚拟随机系统,将MPC问题中的目标函数(跟踪误差、控制量代价等)转化为虚拟系统的似然函数,将避障、道路边界、执行限度等约束转化为虚拟观测。在高斯噪声假设下,严格证明了MPC问题的最优解与最大后验(MAP)状态估计问题的解完全等价。这一转化让原本棘手的非线性优化问题,变成了成熟的贝叶斯估计问题,为借用估计领域的成熟技术奠定了理论基础。
2. MPIC的核心逻辑:前向滤波+后向平滑
MPIC框架采用“滚动时域”的前向滤波/后向平滑结构:
- 前向滤波:从初始状态出发,结合虚拟观测递归更新状态的后验概率分布,逐步逼近符合约束的状态空间;
- 后向平滑:从预测时域的末端回溯,修正各时刻的状态估计,最终得到全局最优的控制决策(运动规划)。
这一过程完全摆脱了梯度优化的桎梏,转而利用贝叶斯推理的优势处理非线性、非凸的NSS模型。
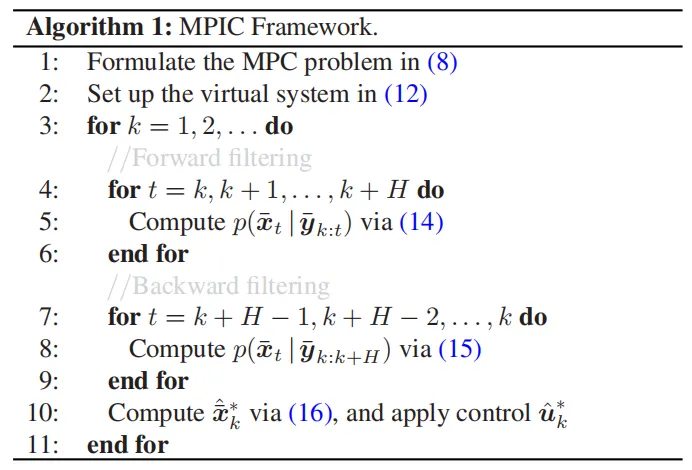 图2:MPIC框架整体流程(算法1)。该框架以滚动时域为核心,通过前向滤波与后向平滑的贝叶斯推理过程,实现最优运动规划的推断生成,而非传统的梯度优化求解。
图2:MPIC框架整体流程(算法1)。该框架以滚动时域为核心,通过前向滤波与后向平滑的贝叶斯推理过程,实现最优运动规划的推断生成,而非传统的梯度优化求解。
三、高效执行:隐式粒子滤波/平滑器的创新设计
为让MPIC框架落地,研究团队针对粒子滤波/平滑的“粒子退化”痛点,开发了基于隐式重要性采样的高效算法——将隐式粒子滤波/平滑实现为无迹卡尔曼滤波器/平滑器组(Kalman-IPF/IPS)。
1. 隐式重要性采样:少粒子也能高精度
传统粒子滤波需要大量粒子才能避免退化,但这会牺牲计算效率。隐式重要性采样的核心思路是:不盲目增加粒子数量,而是让粒子精准落在目标分布的高概率区域。研究团队引入参考概率分布,通过映射关系将参考分布的高概率粒子转化为目标分布的高概率粒子,仅需少量粒子就能达到高精度估计,大幅降低计算量。
2. 卡尔曼滤波器组:并行化提升效率
基于隐式重要性采样原理,团队将粒子更新过程设计为并行运行的无迹卡尔曼滤波器/平滑器组。无迹卡尔曼滤波擅长处理非线性系统的高斯近似,而“组”的设计让多个滤波器并行计算,既保证了估计精度,又极大提升了采样和计算效率,有效缓解了粒子退化问题。
将这一方法集成到MPIC框架中,最终形成了MPIC-X算法。仿真验证表明:MPIC-X的计算速度比基于梯度的MPC(IPOPT)快一个数量级以上,且对神经网络架构的复杂性不敏感;即便在H=40、60的长预测视野下,仍能稳定求解,而传统梯度方法早已无法收敛。
四、实验验证:效率与性能双优
研究团队通过多场景自动驾驶仿真,全面对比了MPIC-X与传统梯度MPC的性能:
- 计算效率:无论神经网络架构简单或复杂,MPIC-X均保持高速求解,长预测视野下优势尤为显著;
- 规划效果:在避障、道路边界遵守、乘坐舒适性等维度,MPIC-X生成的运动规划与传统MPC相当,甚至在复杂场景下更稳定;
- 鲁棒性:对初始猜测不敏感,避免了传统梯度方法因初始值不佳导致的求解失败问题。
此外,研究还基于真实车辆完成了验证,进一步证明了MPIC框架的工程实用性。
五、总结与展望
这篇论文的核心贡献,在于打破了“MPC必须依赖梯度优化”的固有认知,建立了控制与估计的等价关系,提出的MPIC框架为处理复杂神经状态空间模型的自动驾驶运动规划提供了全新思路。MPIC-X算法的高效性,让自动驾驶在面对高复杂度车辆动力学模型时,既能保证规划的最优性与安全性,又能满足实时性要求。
未来,这一框架有望拓展到更复杂的交通场景(如多车交互、极端天气),也可与强化学习结合,进一步提升自动驾驶决策的智能化水平。对于自动驾驶算法研发而言,MPIC的出现为解决“复杂模型与实时性”的矛盾提供了关键突破口,具有重要的理论与工程价值。



