Insightsfrom psychophysiological workload analysis of human-driven
vehicle drivers in interactions with autonomous vehicles
基于人车交互中人类驾驶员与自动驾驶车辆的心理生理工作负荷分析
作者: Hoseon Kim,Jieun Ko,Cheol Oh,Hyeonseok Jin
1. 引言
随着自动驾驶技术的普及,未来道路交通将进入人类驾驶车辆(MV)与自动驾驶车辆(AV)长期共存的混合过渡期,但现有的研究多聚焦于AV的技术性能或宏观交通流优化,往往忽视了人类驾驶员在与AV交互过程中的心理感受和主观安全性。统计数据显示,绝大多数涉及自动驾驶的事故发生在与人类驾驶车辆交互时,尤其是在无信号灯路口进行非保护左转等高风险场景下,AV的行驶决策极易引发人类驾驶员的焦虑与压力。因此,该研究强调了研究人类心理生理工作负荷的必要性,提出利用脑电图(EEG)量化驾驶员的焦虑水平(ANI),并将这种心理指标与传统的代理安全指标(PET)相结合,旨在解决混合交通环境下的交互冲突问题。
2. 研究内容
该研究针对AV与MV在无信号灯路口交互时的安全及心理冲突问题,通过多智能体驾驶模拟实验(MADS)并结合真实路测数据,利用脑电图(EEG)技术量化了MV驾驶员在冲突过程中的焦虑与紧张指数(ANI)。研究深入分析了心理压力指标与物理安全指标(后入侵时间 PET)之间的函数关系,并以此为基础提出了一套兼顾交通效率与人类心理感受的“以人为本”AV行为决策逻辑,为未来自动驾驶系统在混合交通流中的安全评估与算法优化提供了科学的定量支撑。
3. 研究方法
研究采用两个时间和空间同步的驾驶模拟器,通过如图 1 所示的四步分析框架系统地建立AV的行为需求,展示了从真实数据收集、MADS、心理生理指标量化到最后AV行为要求识别的完整流程。
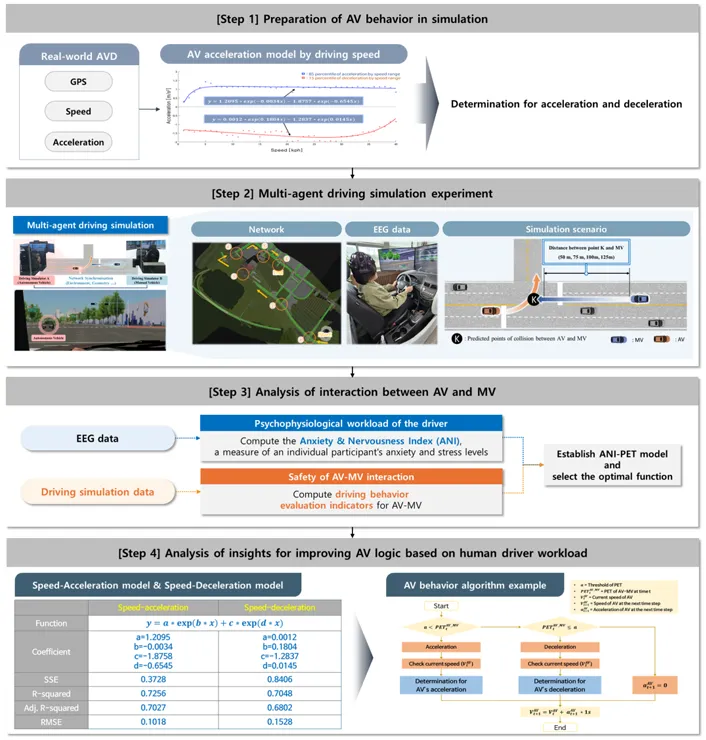
图1 总体研究流程
3.1基于实证数据的AV行为建模
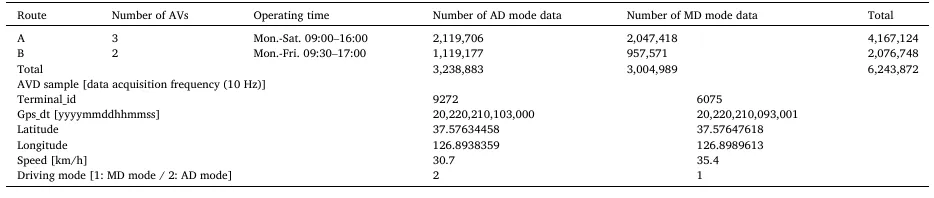
为了确保仿真结果可靠,如表1所示,该研究利用首尔桑岩自动驾驶测试平台五辆AV的真实数据集进行建模,涵盖了坐标、速度及运行状态等参数。通过分析真实加减速分布,采用第85百分位加速值和第15百分位减速值推导出最契合现实的动力学模型,并将其集成至驾驶模拟算法中。
表1 AVD的特征
如图2所示,该算法整合了基于速度的运动学调整框架,并在无信号灯路口左转场景中采用两阶段操作协议:AV根据对向机动车(MV)的预测后入侵时间(PET)进行决策,若PET超过阈值则加速,低于阈值则减速或停止,具体的速率应用由前述速度驱动的加减速函数实现。
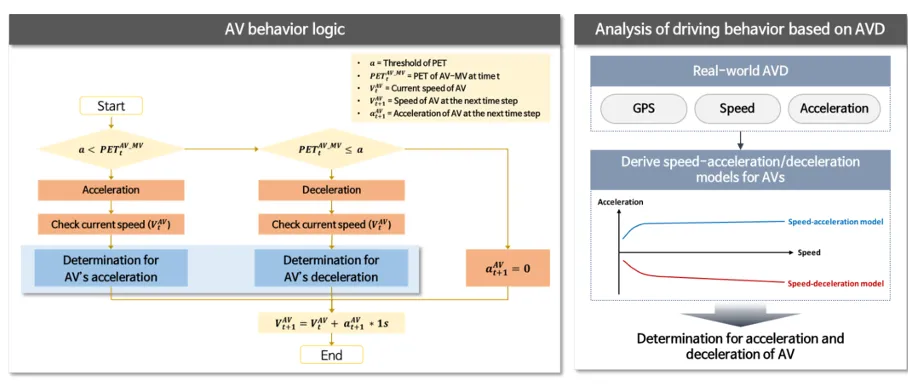
图2 基于实际数据在驾驶模拟中实现自动驾驶行为的开发
3.2 MADS实验
该研究利用SCANeR™软件构建了包含两个时空同步模拟器的MADS环境,实现了AV与MV在共享虚拟空间内的实时交互。如图3所示,该实验聚焦于无信号灯路口左转AV与直行MV的高风险冲突场景。实验招募了15名平均驾龄20个月的参与者(7男8女),并在以首尔桑甘自动驾驶测试床为模型、限速50km/h的虚拟网络中进行。
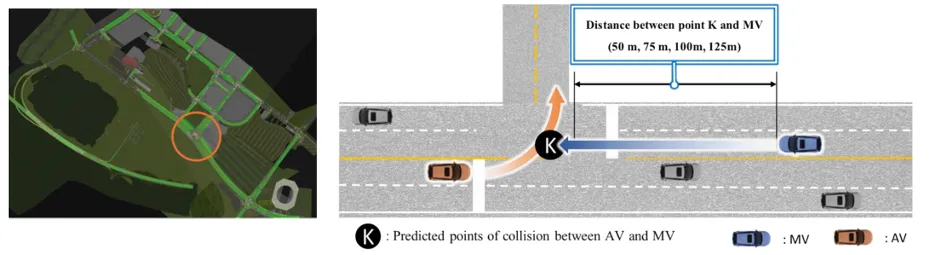
图3 交叉路口无保护左转的情景
3.3车辆交互分析方法
如图4所示,该研究利用MADS实验框架下的AV与MV配对交互模式,通过分析EEG数据评估驾驶员对AV异常驾驶状态的反应。通过系统比对AV进入异常状态的时机与MV驾驶员焦虑反应的起始点,旨在推导出指示心理状态转折的关键PET阈值。

图4 用于AV-MV配对交互的MADS实验框架
如表2所示,EEG信号按频段分类。该研究采用图5所示的脑电图(EEG)设备,定量分析传统驾驶员对自动驾驶车辆进入状态的焦虑反应。通过CGX采集程序实时监测脑电波,在计算β/α频谱比值前对EEG信号进行预处理与基线校正。原始信号经1-40Hz带通滤波预处理,并减去受试者十分钟静息状态的平均功率谱进行基线校正,以消除肌肉伪迹、噪声干扰及个体变异性,确保心理生理工作负荷评估的准确性。
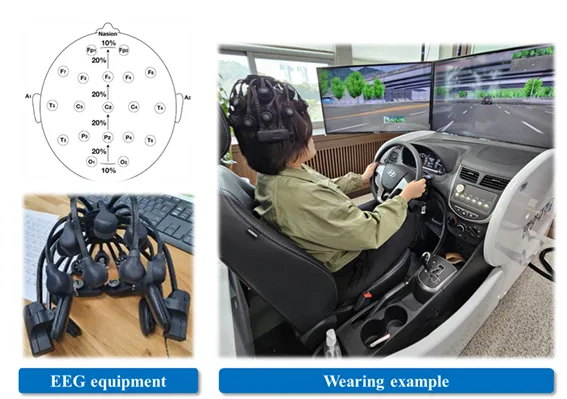
图5 头戴设备及佩戴示例
表2从脑电图分析中提取的信息
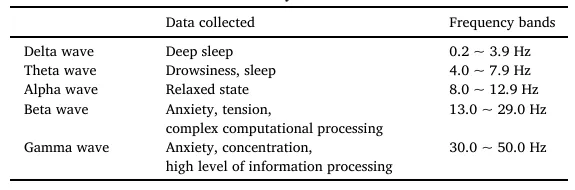
提取预处理后的β(13–29 Hz)与α(8–12 Hz)功率,计算β/α比值表征压力水平。先前研究表明β/α升高对应心理与生理压力增加,且当β/α≥1.5时提示显著焦虑。基于该阈值计算ANI值,并将ANI≥1.5判定为驾驶员处于明显焦虑状态,从而实现对应激反应的量化评估。
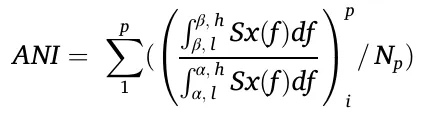
其中,i:驱动器,p:p电极,Np:p电极数量,β,h:29.99 赫兹,β,l:13.00 赫兹,α,h:12.99 赫兹,α,l:8.00 赫兹。
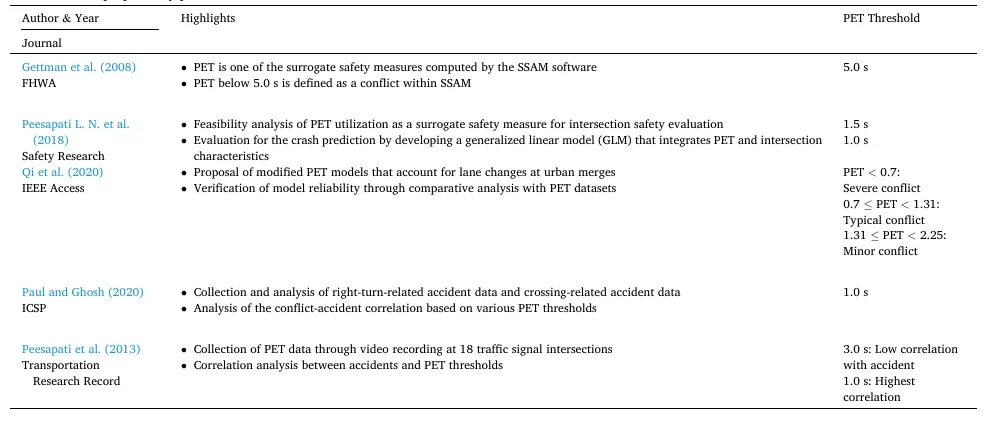
如表3所总结,该研究对先前建立PET阈值作为潜在碰撞风险的研究进行了全面回顾。选用PET作为主要替代安全指标,因其可基于实际轨迹数据直接计算,并与EEG反应实现时间同步。基于AV与MV的坐标、速度及预期冲突点的时空关系计算PET,衡量车辆到达冲突点的时间差。既有阈值研究发现,虽SSAM将PET<5 s定义为关键冲突,但实证表明1–2 s时事故风险显著上升。在此基础上,研究融合脑电与车辆行为的多模态数据,构建ANI–PET关系模型。
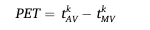
表3 先前研究提出的PET阈值
其中,tk AV:从点 t 到点 k 的自动驾驶车辆时间(秒),tk MV:从点 t 到点 k 的对向车辆时间(秒)。
3.4ANI中边际改进分析的应用
该研究确定了PET值达到临界点时ANI降低趋于平稳的状态,该临界点被定义为最小效应阈值(MIP)。为推导MIP阈值,基于ANI-PET函数关系,将PET值以0.1为增量从0.1递增至10进行ANI计算。当通过ANI-PET关系斜率分析确定的每单位PET增量对应的ANI下降速率低于0.01时,视为ANI已收敛至MIP阈值。所推导的MIP值可用于基于机动车驾驶员心理生理负荷设计自动变速器行为算法。MIP阈值推导方法如图6所示。
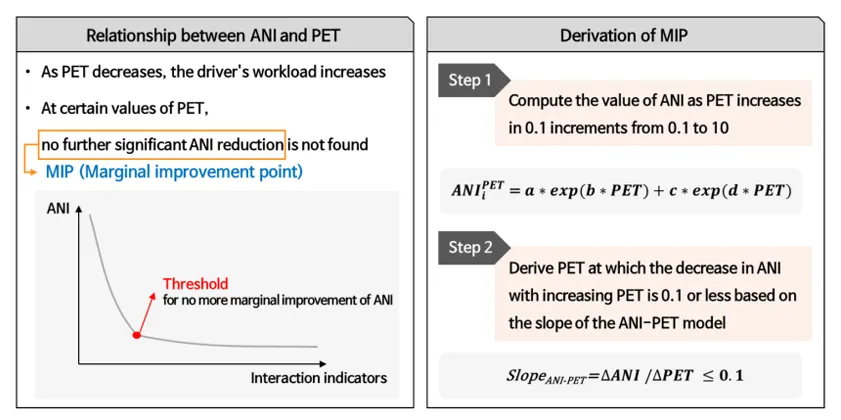
图6 推导 MIP 的方法论
4. 研究结果
4.1增强模拟AV行为逻辑
通过整合行为控制逻辑,将先前研究中的自动驾驶行为算法进行了增强。如表4所示,这些结果揭示了自动驾驶行为中明显的与速度相关的模式特征。
表4 由AVD数据得出的速度-加减速结果
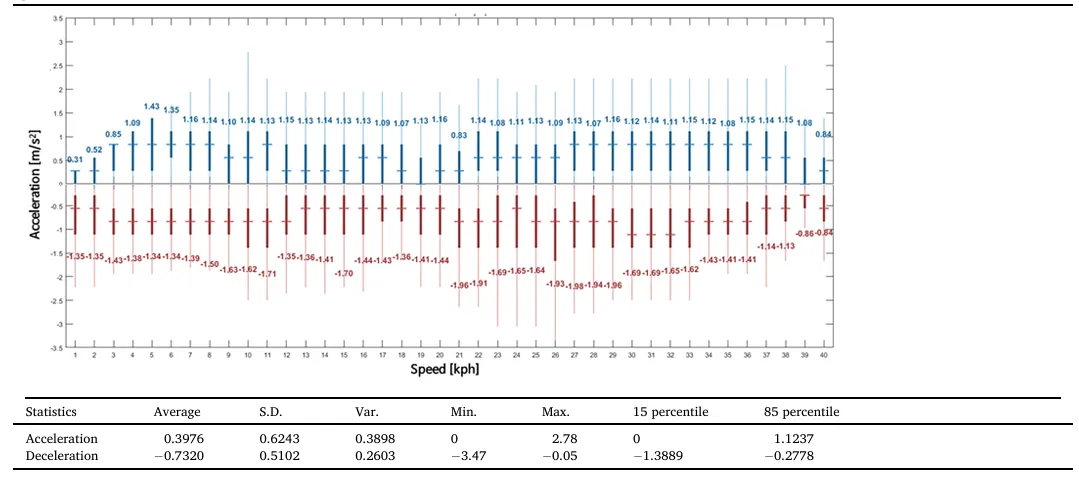
AV速度与两个关键行为指标之间的量化关系:第85百分位的加速度和第15百分位的减速度,这些关系是通过对运行数据的实证分析得出的。随后,系统地评估了五个候选函数,以表征与速度相关的AV行为。其中双指数函数表现出更优的性能,能够解释加速度方差的72.56%(R² = 0.7256)以及减速度方差的68.02%(R² = 0.6802)。最终模型如下两个公式所示。


如图7所示,将模型输出与经验百分位数进行比较的可视化结果,展示了对基本速度-加速度和减速度关系的有效表示。
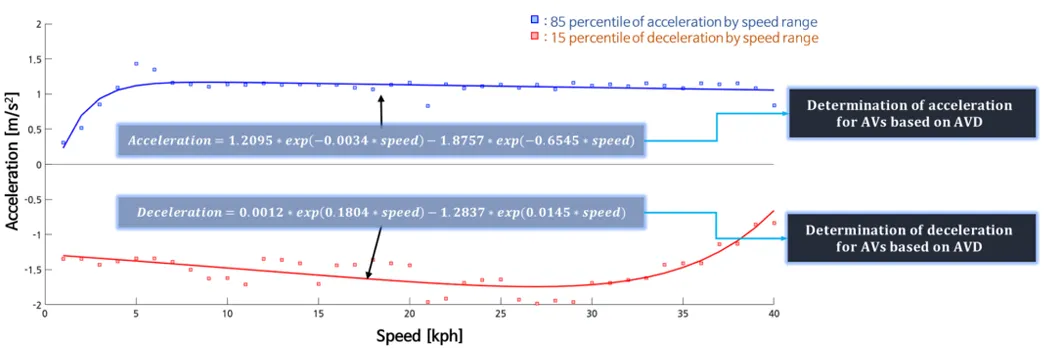
图7 基于行驶速度的加速和减速模型
4.2ANI-PET关系分析
该研究开发了一个函数来模拟PET-ANI关系,旨在制定考虑MV驾驶员心理生理工作负荷的AV行为要求。图8(a)显示了随事后侵入时间(PET)变化的ANI分布。主要观察结果显示:当 PET < 2.0 秒时,ANI 超过 1.5,表明 MV 驱动负荷升高;在 PET ≥ 3.0 时未观察到显著的 ANI 降低;PET值高于3.0秒对MV驾驶员工作负荷的影响可以忽略不计。
基于ANI(平均)- PET评估,双项指数函数被确定为最优模型。该函数如下公式所示。最终模型的调整R²=0.9452,证实了PET-ANI关系的高度解释力,并支持其在自动驾驶车辆(AV)行为设计中的应用。

基于原始PET–ANI数据对线性、二次、对数和双指数模型进行比较,结果显示双指数模型拟合最佳(SSE、AIC、BIC最低),因此被选为最优函数。分析表明,当PET≥2.7 s时,ANI不再显著下降,说明2.7 s是无保护左转场景下AV决策的关键阈值:≥2.7 s可安全通过,<2.7 s需减速或停车。相比既有研究中ANI=1.5对应的PET=1.9 s,本研究提出的MIP阈值更为保守,表明可根据MIP与ANI阈值选择性应用PET,以提升高流量场景下的运行效率。如图9所示,展示了基于上述研究结果的AV行为逻辑的示例应用。所提出的算法建立了一种安全高效的AV驾驶策略,同时考虑了与AV交互时MV驾驶员的心理生理负荷。
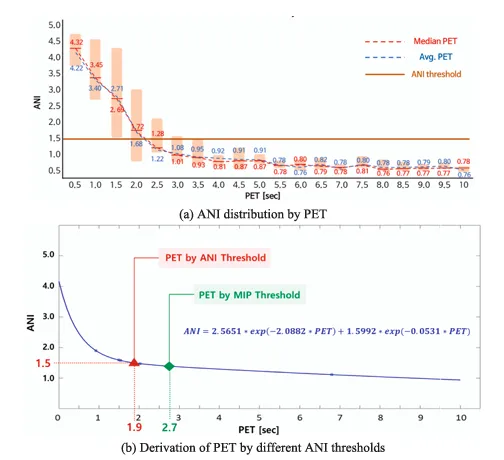
图8 ANI-PET 阈值分析
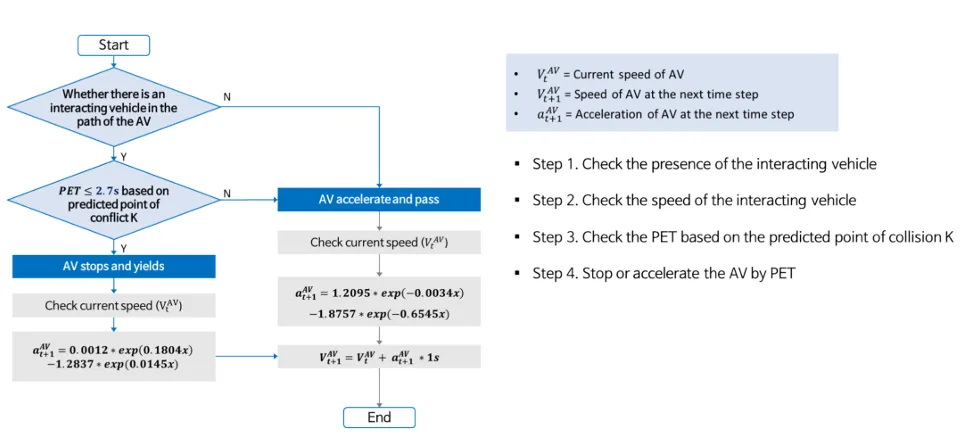
图9 改进AV逻辑的一个应用
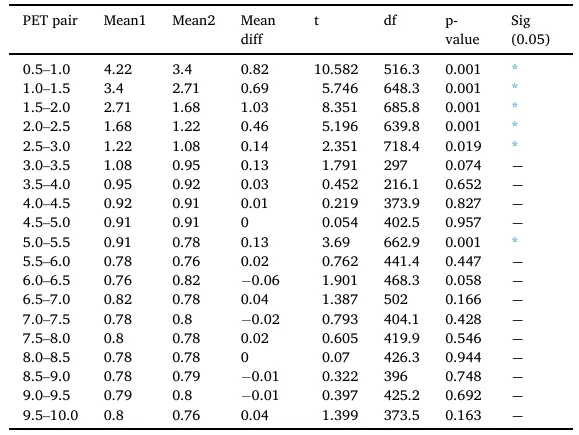
如表5所示,通过对连续PET分箱进行t检验发现,ANI在2.5–3.0 s区间仍显著下降,但自3.0–3.5 s起差异不再显著,说明约3.0 s为PET影响ANI的临界点。此后PET延长对ANI降低作用有限,仅在5.0–5.5 s出现微弱显著差异但不改变整体趋势。总体表明,ANI显著变化主要发生在PET<3.0 s阶段。
表5 连续PET t检验结果
5. 结论
该研究通过多智能体驾驶模拟实验量化了人类驾驶员在与自动驾驶车辆交互时的心理生理工作负荷,建立并验证了描述焦虑指标与安全指标之间关系的双指数模型,成功识别出人类感知安全的危险阈值(1.9秒)与心理舒适度的边际改善临界点(2.7秒),并据此提出了一套以人为本的自动驾驶决策逻辑,即在PET低于2.7秒时采取减速或让行以缓解人类压力,从而为优化混合交通流中自动驾驶车辆的行为算法及提升社会接受度提供了科学的定量基准。
6. 文献出处
Hoseon Kim, Jieun Ko, Cheol Oh & Hyeonseok Jin. (2025). Insights from psychophysiological workload analysis of human-driven vehicle drivers in interactions with autonomous vehicles. Accident Analysis & Prevention, 223, 108252.
7. 点评
该研究基于EEG构建ANI–PET关系模型,将神经生理指标与交通冲突替代安全指标相结合,从多模态数据角度揭示了自动驾驶车辆与人类驾驶员交互中的心理生理工作负荷变化机制,在方法整合和阈值量化方面具有较强创新性和实践指导意义。然而,研究仍存在一定局限,实验情境主要基于模拟或特定交叉口场景,样本规模及场景多样性有限,可能影响结果的外推性;且PET作为单一核心替代安全指标虽便于与EEG时间同步,但未充分考虑复杂交通环境中多冲突因素的叠加效应,模型在高密度、多主体交互场景下的适用性仍需进一步验证。整体而言,该研究为自动驾驶行为阈值设定提供了重要实证依据,但仍有扩展与深化空间。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 贾思怡
审核丨 李珺
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
