智能驾驶终局之战:纯视觉主导下半场,2026年能否迎来“iPhone 4时刻”?
当前,智能驾驶行业正站在一个关键的路口。一种观点认为,2026年将是行业的“iPhone 4时刻”,纯视觉方案将凭借其强大的端到端模型能力,收割全球绝大部分市场份额,而依赖多传感器硬件堆叠的路线可能沦为昂贵的过渡方案。这并非简单的成本之争,而是一场关于技术范式的深刻变革。
『 路线之争:眼睛 vs. 拐杖 』
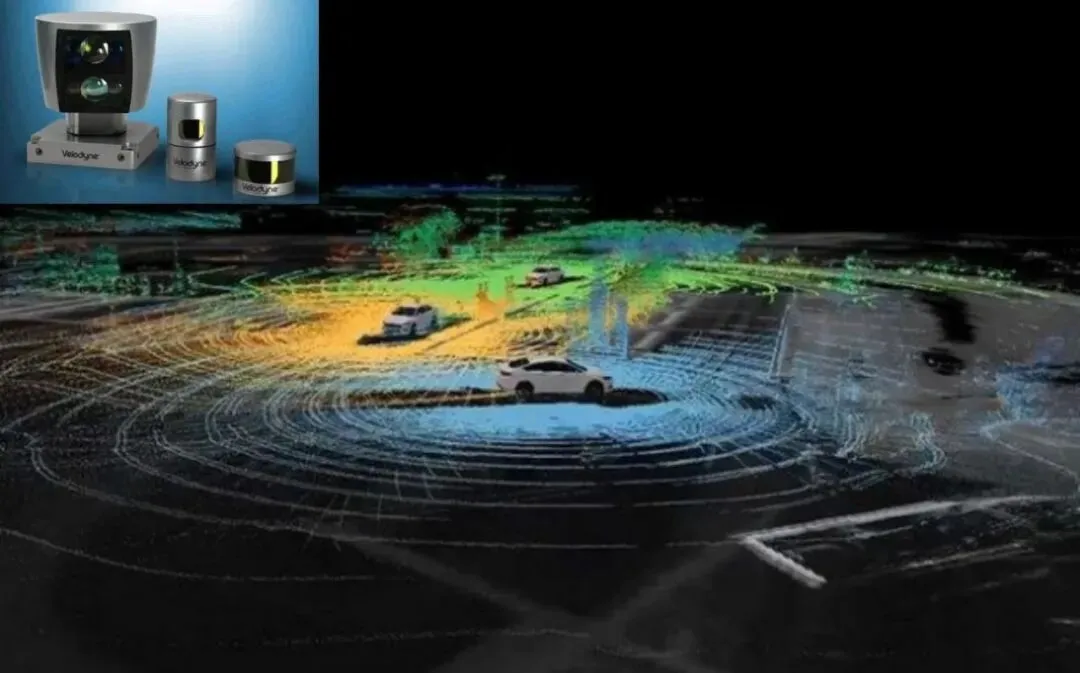
市场表象背后,是一场关于“眼睛”与“拐杖”的路线之争。行业一度陷入硬件军备竞赛,以堆砌激光雷达数量为荣。
而另一边,以特斯拉为代表的纯视觉路线则被部分传统观点质疑为“重度近视”。
然而,资本市场的反应揭示了更深层的逻辑。特斯拉FSD V14版本带来的估值重构,核心在于其端到端模型展现出的“拟人化”决策能力,正在颠覆过去基于规则驱动的旧范式。纯视觉的目标绝非减配,而是实现“数字生命”对“机械规则”的降维打击。
『 两个根本性逻辑逆转 』
这一转变的底层逻辑,源于两个根本性逆转。
第一,是从“传感器冗余”转向“认知冗余”。激光雷达能提供精确的点云数据,但缺乏语义理解,无法分辨障碍物的具体属性。
第二,是第一性原理的回归。人类仅依靠视觉和大脑就能安全驾驶,那么当摄像头分辨率和中央算力达到甚至超越人类感知与决策的精度时,额外的物理传感器就可能成为一种“拐杖”。
『 占用网络与端到端模型的技术革新 』
纯视觉方案之所以现在被重新审视,关键在于两项核心技术的质变。
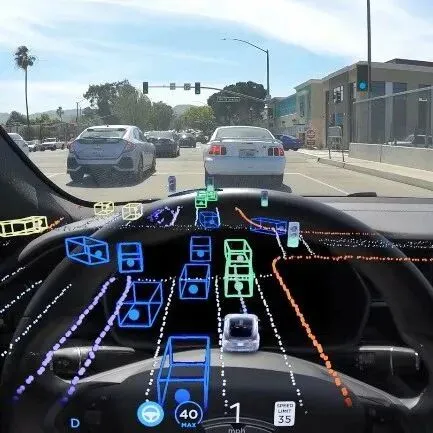
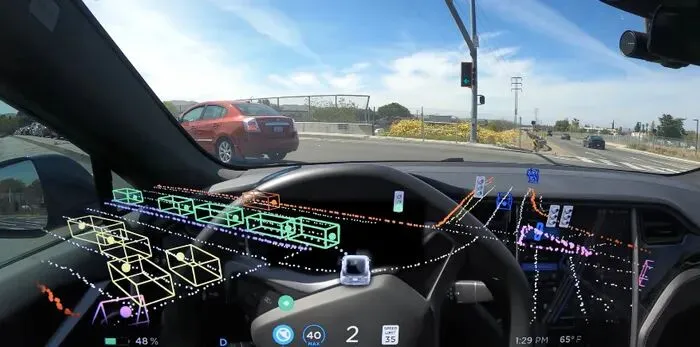
首先是“占用网络”技术,它让系统不再仅仅分析二维图像,而是通过算法实时构建一个可理解的3D物理世界,甚至能识别传统视觉难以处理的立体地画等场景。
其次是“端到端模型”的成熟。它打破了传统自动驾驶中感知、规划、控制模块割裂的“缝合怪”架构,实现了从图像输入到操控指令的直接输出。这种模型通过海量真实世界数据的训练,正催生出类似人类直觉的驾驶能力。
『 成本优势带来的规模性增量 』
从产业趋势看,当前智驾行业与2010年的智能手机市场极为相似。当时,坚持实体键盘的诺基亚与拥抱全触屏的iPhone,恰如今天依赖激光雷达硬件反馈与押注纯视觉算法的路径分野。
成本差距构成了压倒性优势:一套高性能激光雷达系统成本高昂,而高清摄像头模组成本极低。巨大的成本差异意味着纯视觉方案能够快速普及至更主流的车型,从而启动“数据飞轮”——更大规模的车队将收集更海量、更多样的行驶数据,进而反哺算法以更快的速度迭代进化,形成难以逾越的壁垒。
『 软件服务低成本的价值凸显 』
这不仅将改变产品形态,更将重构汽车行业的资产定价模型。过去,汽车价值主要源于硬件制造毛利。未来,高度智能的驾驶系统将使车企向软件订阅服务商转型,其软件服务的毛利率潜力远高于硬件。
这也解释了为何上游的算力提供商价值凸显,因为训练纯视觉大模型所需的“算力石油”,已成为整个产业竞争的基础设施。
『 未来的三大结构性方向 』
基于上述变革,未来几年的结构性机会可能集中在三个方向:
一是支撑端到端模型训练的算力基础设施,包括高性能AI芯片与超算中心;
二是高像素、高稳定性的车载光学模组,将伴随摄像头“量价齐升”而受益;
三是Robotaxi运营平台,纯视觉带来的成本大幅下降有望使其实现商业化突破。
『 当前的面临挑战 』
当然,演进之路也面临风险,包括对端到端“黑盒”模型的法规责任认定、高端训练芯片的供应链安全,以及纯视觉在极端恶劣天气下的物理局限性挑战。
然而,激光雷达或许是智能驾驶上半场的有力助推器,但以强大算法为核心的纯视觉方案,正主导下半场终局的到来。
‖ 创作者信息
文章来源:光芯产业圈等网络
以上个人观点仅供参考,不作为投资意见。
我们尊重原创,版权归原作者。
如侵犯到您的权益,请第一时间联系我们。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
