本文基于改进的Newell 模型,构建了传统公交(Conventional Bus,CB)和AB的轨迹生成模型。经典Newell模型是一个简单且被广泛应用的跟驰模型,可用如式(1)的微分方程描述。
式(1)中,V(·)表示关于∆xj(t)函数,如式(2),v0表示驾驶员的期望速度,hc是车辆间的安全距离,Tf是在高密度交通情况下跟驰行为的安全时间间隔。但在经典Newell模型中,当车辆刚从停车模式起步时,可能会由于前车车距∆xj(t)无穷大,车辆速度瞬时变为v0,与实际行驶规律相悖。为此,本文参考相关论文,考虑跟驰过程中车辆与前车的车间距、速度差,以及自身加减速性能约束,对该模型进行改进。从相关文献数据中可以获得传统公交模型的参数取值,自动驾驶公交的参数由道路测试数据标定。
式(3)中λ为速度差项的权系数,∆xj(t)表示第j辆车与前车的车间距,V1[∆xj(t)]和 V2[∆vj(t)]分别是关于车间距和速度差的函数,具有如下形式:
其中,vmax为设定的最大速度,γ,c 为待定常数。
VSP是机动车能耗与排放计算预测模型中的核心参数,该概念于1999年由国外学者提出,指单位质量机动车的瞬时功率,即驱动单位质量车辆行驶所需的功率。VSP可通过车辆行驶速度与加速度计算得到,结合相关研究的典型参数可推导得到简化计算式,当前公交车辆领域公认的VSP计算公式如式(6)所示。
因此,获取车辆某一时刻的行驶速度、加速度及道路坡度,即可计算该时刻的VSP 值。但基于逐秒排放数据得到的VSP对应排放数据离散性显著,为明晰VSP与排放的关联规律,现有研究提出两种VSP聚类方法,即MOVES聚类法与等间隔VSP划分法。为贴合BRT实际运行工况(限速≤50km/h)、准确反映HEB的运行性能,本文参考MOVES聚类法,定义11个VSP间隔区间,取值范围为-20.5~20.5kW/t。各VSP区间内HEB的能耗与排放率ERi,k,由便携式排放监测系统(PEMS)对特定车辆在特定道路工况下的监测数据得到EFi,k后,通过式(7)计算获得。针对车辆行驶轨迹的每个时间步,先通过式(6)计算对应VSP值,HEB的能耗与排放率ERi,k未采用VSP的连续函数建模,而是依据前述定义的VSP区间进行离散化分配;该映射关系通过式(8)中的δ(∙)函数实现,该函数为区间查找函数,可将VSP值匹配至对应区间。车辆行驶的总能耗与总排放量,由各轨迹点的ERi,k积分计算得到,计算公式如式(9)所示。
式中:
ERi,k——第k个VSP区间内第i项评价指标的能耗或排放率(单位:g/s);
EFi,k——第k个VSP区间内第i项评价指标的总能耗或总排放量(单位:g);
Nk——第k个VSP区间的累计时长(单位:s)。
ERtk——第k个VSP区间在时间t时刻的能耗或排放率(单位:g/s);
ES——研究范围内公交的总能耗或排放量(单位:g);
Dk——第k个VSP区间的整体运行时间(单位:s)
MPC的核心是构建预测模型,针对自动驾驶公交的轨迹优化,其预测模型需充分融合车辆动力学与运动学特性。式(10)为车辆动力学的牛顿第二定律公式,其中Fe为驱动力,行驶阻力fd包含坡度阻力、滚动阻力与空气阻力,具体如式(11)所示。
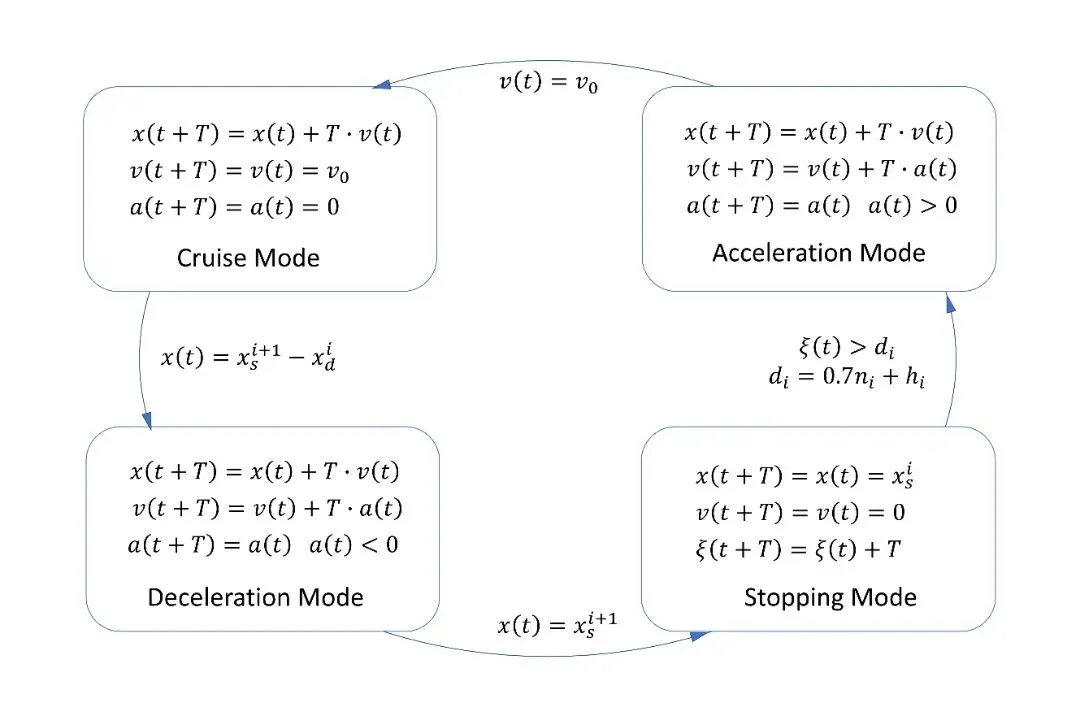
运动学模型则结合自动驾驶公交的实际运行特征构建,由于公交运行会因站点停靠、乘客乘降产生间断性,本文构建离散型混合动力学模型表征其运动状态,贴合公交“停车—加速—巡航—减速—停车”的典型运行循环,其模式切换规律如图1所示,各模式间的转换关系由箭头旁公式表征。该模型通过实时监测公交的速度与位置状态,判断其是否满足模式保持或切换的约束条件;其离散模式机制基于预设的转换条件与操作序列实现动态调整,更契合快速公交的实际运行响应特征。从加速、巡航到减速模式中,x(t),v(t),a(t)分别表示在时间t时的距离、速度、加速度。停车模式时当公交车在站点停下时,乘客上下车。记 表示第i站的位置坐标,ξ(t)为累计停车时间,di为公交在站点i的停靠时长,ni为站点i的乘客乘降数,hi为站点i的最小停靠时长,且需满足约束条件di>0.7ni+hi。当累计停车时间满足ξ(t)>di时,公交完成乘降并退出停车模式、切换至加速模式。
表示第i站的位置坐标,ξ(t)为累计停车时间,di为公交在站点i的停靠时长,ni为站点i的乘客乘降数,hi为站点i的最小停靠时长,且需满足约束条件di>0.7ni+hi。当累计停车时间满足ξ(t)>di时,公交完成乘降并退出停车模式、切换至加速模式。
图1 离散循环运动学模型
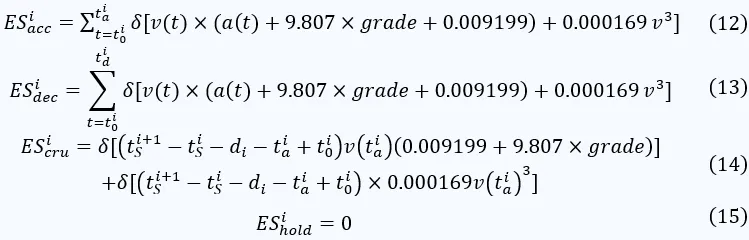
基于公交能源环境效率(EEE)量化模型,站点i至i+1区间内,离散循环运动模型的总能耗与排放量由式(12-15)表征,其中 、
、 、
、 、
、 依次为加速、减速、巡航、停车模式下的总能耗与排放量,函数δ(∙)的定义同式(8)。
依次为加速、减速、巡航、停车模式下的总能耗与排放量,函数δ(∙)的定义同式(8)。
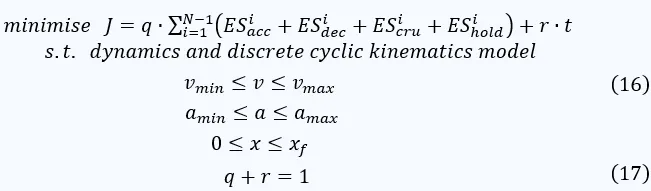
本研究以动力学模型、离散循环运动模型及加速度、速度、行驶距离的取值范围为约束,在全程路线[0,xf](xf为路线总里程)内最小化能耗排放与行驶时间t的综合指数J,如式(16);式中q、r分别为EEE与运行时长权重系数,关联关系由式(17)定义。
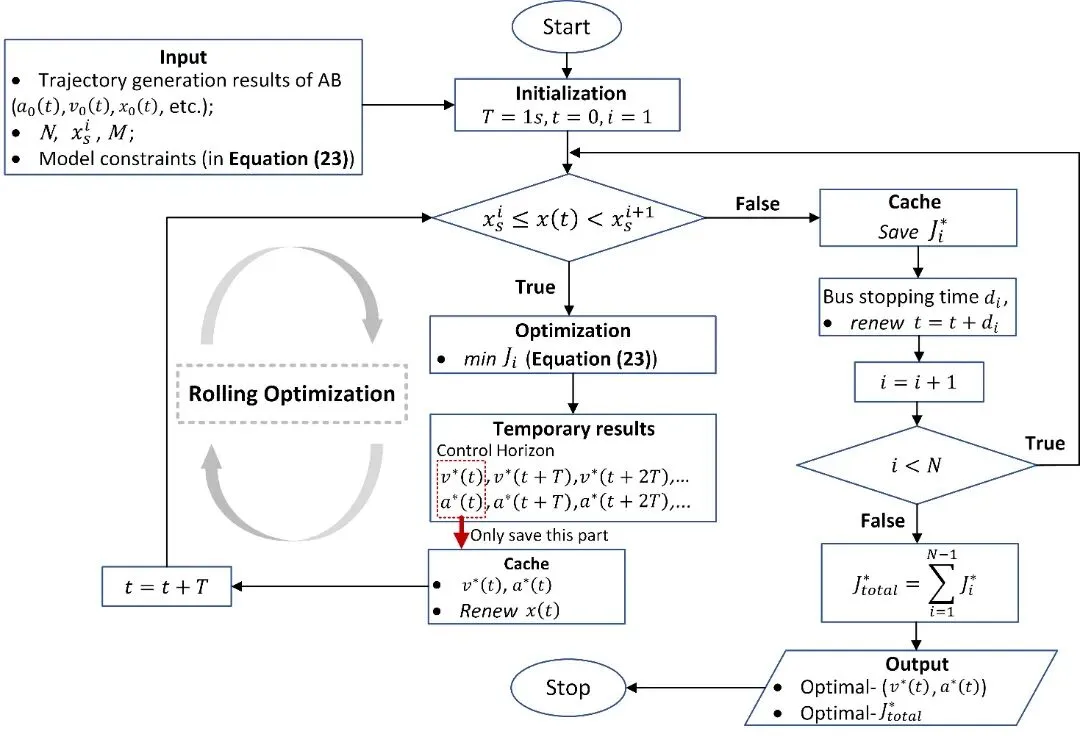
优化模型的求解算法结合NMPC滚动优化的核心,考虑BRT相邻站点路段独立性及公交离散循环运动模型,本研究将站点i至i+1路段设为可变优化区间,控制周期与时间步长均为1秒,每一步采用MATLAB内点算法,迭代优化当前区间轨迹后依次推进至下一区间。优化算法步骤简化如图2。
图2 MPC优化算法流程图
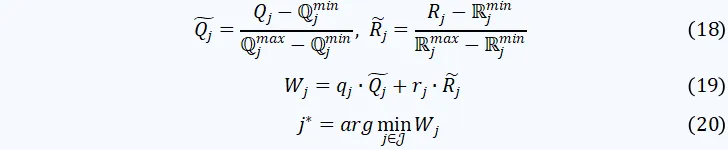
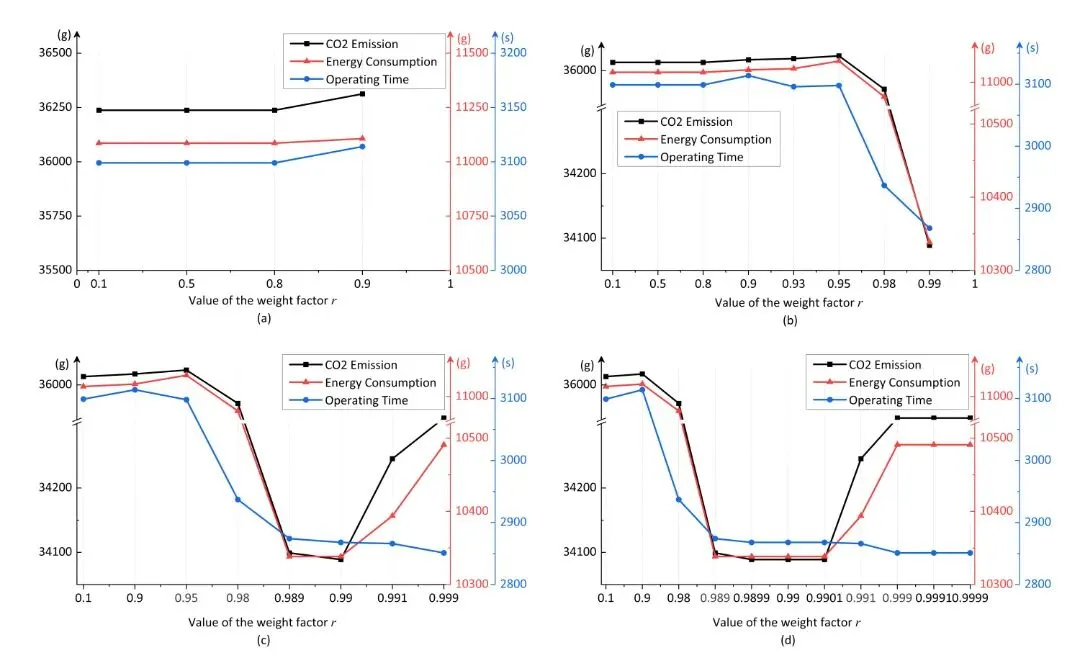
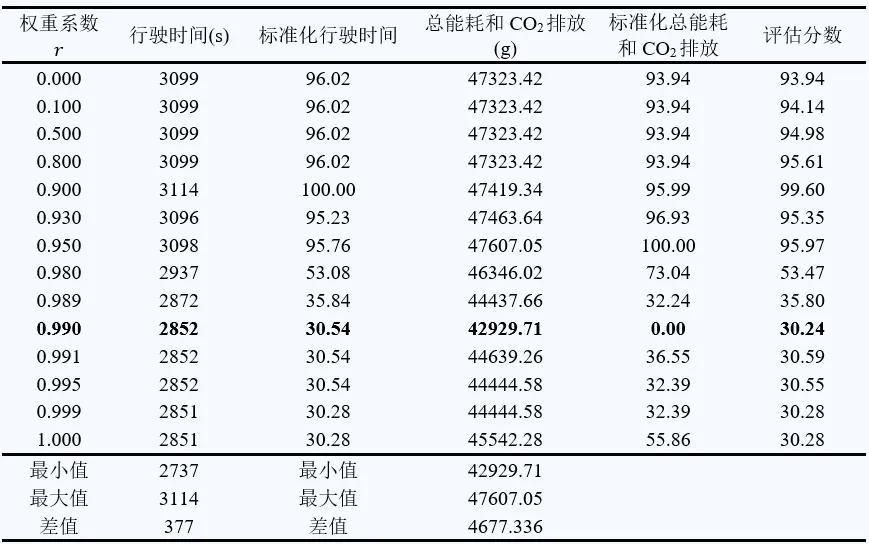
EEE和行驶时间的权重系数q与r通过多目标优化经典加权求和法定义,需经敏感性分析调整以实现帕累托最优;采用归一化综合评估法,通过式(18)标准化权重对应最优能耗与行程时间,式(19)计算综合得分,最终由式(20)确定帕累托最优权重。







 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
