2022年8月1日在休息一周之后,我进入现在辅助驾驶公司。在开始的半年直接的问题是我不知道这个行业的专业概念和缩写,相当于是语言问题,反而信息安全这个我的本质工作却没有挑战,因为信息安全技术本来就有极好的跨行特性。语言问题核心是一个使用环境问题,有了使用环境一年内就能和土著们无障碍交流。我当时就认为自己已经跨行成功了,已翻过山了,同时实际的体感上又觉得差点意思。能够正常交流,碰到问题有百度有谷歌,现在还有AI工具。事实上能够配合同事的工作,答复客户的需求,应该算是行内人员了吧!这种感觉和刚参加工作的第二年一模一样。难道我再重复一遍过去的自己,不重复又能做点什么呢?我不确定之前做对了哪些事情,当然也不确定哪些事情做错了。在迷糊状态下走3年,但是有一点算是清醒的就是我对自动驾驶的行业知识远低于智能家居,不是说因为智能家居7年经验大于自动驾驶3年经验,而是我完成现在的工作好像也不需要行业知识,但是之前我都是从智能家居行业情况开始着手自己的工作的。
总结而言:跨行的第一阶段是语言问题,然后就进入了不知道问题在哪里的迷雾阶段。
结构化自己之前的经验的重要性
爹有娘有不如自己有,在个人手艺和能力上更是如此。我在智能家居行业上算是成功的,至少养活了一家人,但是这种成功中有多少是运气又有多少是能力。最重要的是我期望能在自动驾驶行业也能成功,直接原因就是生活所迫,进步的奢望就是能够芝麻开花节节高,或者说至少产生一些不同。
为了上面的目的,我尝试去区分运气和能力以及进一步结构化自己,但是最终的结论却是——我的确不是个聪明人,记忆中自己完成的大事并没有什么困难,没有完成的事情其实也没有那么难,可见之前的运气确实不错,非常感谢之前的同事和领导。目前的结论是我并没有自己的独特的方法论,那么哪些外部的方法论对我的帮助最大呢?控制论、系统论以及认知方法对过去的自己帮助最大。那么我就用控制论的框架对过去4年的自动驾驶知识进行结构化抽象。
自动驾驶的三个重要控制闭环
自动驾驶业务第一个知识需要了解车辆是如何被驾驶的,并且是高纬度抽象下的理解。
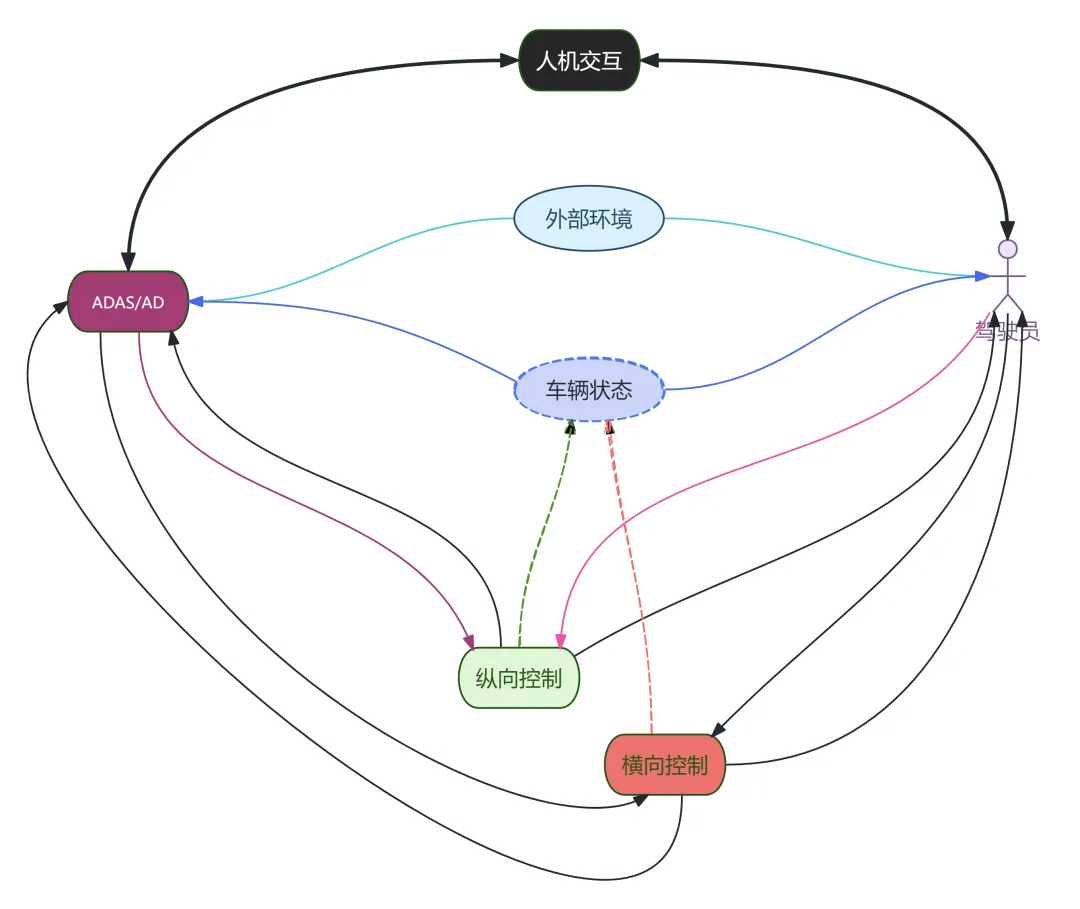
上图就是我按照控制反馈循环绘制的理解图:
一,人类驾驶循环:驾驶员监控外部环境和车辆的状态,通过横向和纵向控制实现车辆整体的状态控制;
二,ADAS/AD驾驶循环:ADAS/AD系统监控外部环境和车辆的状态,通过横向和纵向控制实现车辆整体的状态控制;
三,驾驶员和ADAS/AD交互循环:ADAS/AD自我监控系统和驾驶员的自我感知然后实现人机共驾或者单一方驾驶的状态。
如何使用上述三个控制循环
合规方面使用:
辅助驾驶的法规R152、R171、R130、R157等等都是对上述循环的全部或者部分进行规范;
技术方法使用:
感知能力、驾驶员监控系统、刹车匹配等等都是为了实现上述循环的部分功能;
总结起来一句话,上述三大循环可以作为一个放置和串联零散知识和技术的框架,这样对于进行功能分析、安全分析就有了全局观。
总结
早上突发奇想手绘了文中的循环,然后晚上就有了这片如同呓语般的文字。希望明天自己还能读懂。
参考和相关资料
相关内容:
参考资料:
《诺伯特·维纳的控制论》
欢迎关注沟通