自动驾驶的全链路(感知、定位、融合、规划、控制)本质上是空间信息在不同坐标系间的流转与计算,不同坐标系对应不同环节的计算需求,坐标系转换是实现自动驾驶空间信息统一的核心基础。由于自动驾驶系统重涉及多种坐标系,因此特别容易使人迷糊,本文将从坐标系详细定义、特点与应用对比、转换的核心原因、最优转换方法四个维度,进行系统性解析。
一、自动驾驶核心坐标系详细介绍
自动驾驶坐标系体系可分为三大层级:感知层坐标系、车身核心中间坐标系、定位与地图全局坐标系,各坐标系的定义、轴向、基准严格遵循车载标准与工程实践。
1. 感知层坐标系
感知层坐标系是传感器原生输出的基准坐标系,核心用于描述传感器捕捉到的环境目标的相对位置,是自动驾驶环境感知的输入基础。
1.1 像素坐标系(u-v坐标系)
• 核心定义:数字图像的原生离散坐标系,原点在图像左上角,u轴沿图像宽度水平向右,v轴沿图像高度垂直向下,单位为像素(pixel),坐标值为整数。
• 核心特点:2维离散坐标系,无物理尺度,与图像分辨率强绑定,仅描述像素的行列位置,无三维空间信息。
• 应用范围:相机图像像素级处理,包括目标检测 bounding box 输出、语义分割像素标注、图像特征点提取、视觉SLAM像素匹配。
1.2 图像坐标系(成像平面坐标系,x-y坐标系)
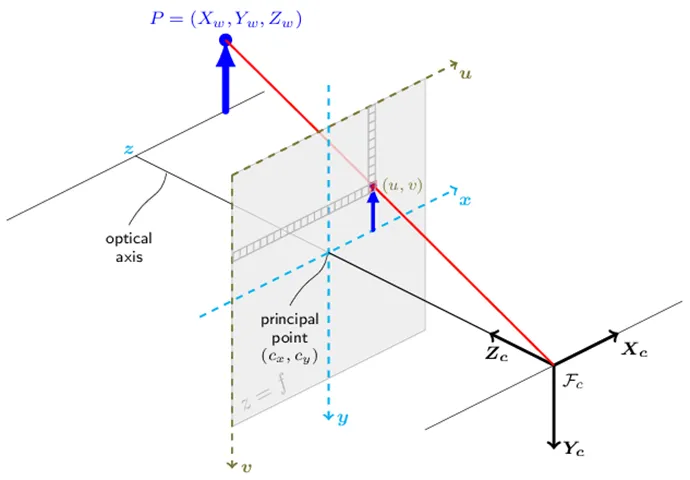
• 核心定义:像素坐标系的物理化转换,是衔接2D像素与3D空间的桥梁。原点在相机光轴与成像平面的交点(主点)(图像中心附近),x轴水平向右,y轴垂直向下,与像素坐标系平行,单位为毫米(mm),是连续物理坐标系。
• 核心特点:2维连续坐标系,具备物理尺度,与相机内参强相关,消除了图像分辨率对空间计算的影响。
• 应用范围:针孔相机模型建模、像素坐标到三维空间的投影反算、单目测距基础计算、图像畸变校正。
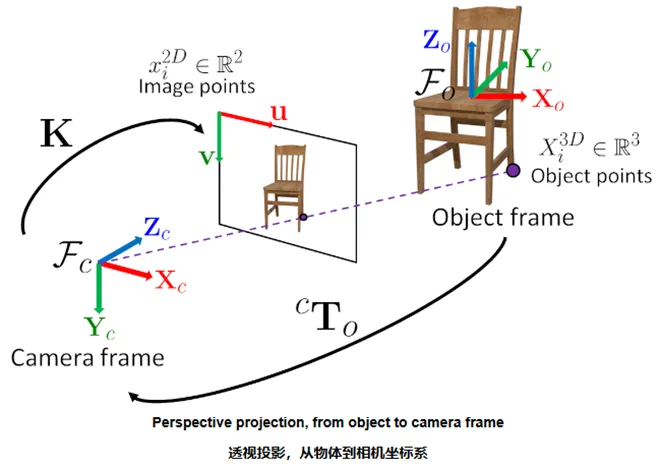
1.3 传感器坐标系
通用定义:每个车载传感器的原生3D基准坐标系,以传感器自身的光学/物理中心为原点,遵循右手定则,与传感器安装位姿刚性绑定,单位为米(m),用于描述目标相对传感器的三维位置。自动驾驶核心传感器坐标系细分如下:
传感器类型 | 原点定义 | 主流轴向规则(右手定则) | 核心特点 | 核心应用 |
相机坐标系 | 相机光心(光学中心) | X轴向右、Y轴向下、Z轴沿光轴向前 | 与相机成像模型深度绑定,是2D→3D映射的核心 | 视觉三维目标检测、视觉里程计、相机标定 |
激光雷达坐标系 | 雷达旋转中心/光学中心 | X轴向前、Y轴向左、Z轴向上 | 直接输出3D点云坐标,测距精度高,单帧无累计误差 | 点云目标检测、SLAM、多传感器融合、障碍物轮廓提取 |
毫米波雷达坐标系 | 雷达天线相位中心 | X轴向前、Y轴向左、Z轴向上(多数仅输出X-Y平面坐标) | 径向速度测量精度极高,抗恶劣天气,垂直方向精度低 | ACC自适应巡航、前向碰撞预警、盲区检测、速度融合 |
IMU坐标系 | IMU测量敏感中心 | 与IMU硬件安装面绑定,X/Y轴沿IMU横向/纵向,Z轴垂直安装面向上 | 高频输出加速度、角速度,是位姿解算的核心,安装偏差直接导致定位漂移 | 组合导航定位、车身姿态解算、运动畸变补偿、SLAM位姿递推 |
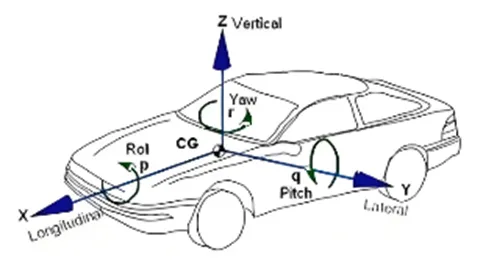
2. 车身核心中间坐标系:车辆坐标系(车身坐标系)
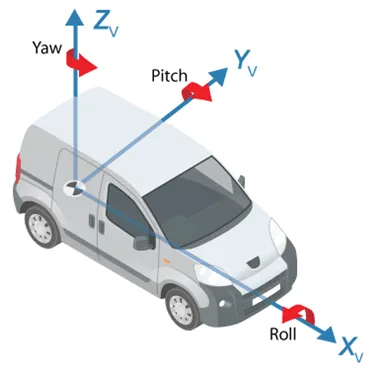
• 核心定义:自动驾驶全链路的核心枢纽坐标系,严格遵循ISO 8855道路车辆标准,主流工程定义:原点在车辆后轴中心与地面的交点(部分厂商定义在质心/前轴中心,以整车标定为准),X轴沿车辆纵向向前,Y轴沿车辆横向向左,Z轴垂直地面向上,右手定则,单位为米(m),3维笛卡尔坐标系。
• 核心特点:与车身刚性绑定,相对位置永久不变,不受车辆运动、转向、俯仰的影响;是所有传感器数据的统一局部基准,也是规划控制指令的输出基准,承上启下衔接感知与全局定位。
• 应用范围:多传感器融合统一基准、障碍物相对车身的位置/速度计算、车辆运动学/动力学建模、局部路径规划、横向/纵向车辆控制。
3. 定位与地图层坐标系
该层级坐标系用于描述车辆的全局绝对位置,衔接局部车身运动与全局地图、导航规划,是自动驾驶实现从A到B点导航的核心基准。
3.1 定位坐标系
定位坐标系是定位系统的输出体系,分为大地坐标系和站心局部坐标系,核心解决“车辆在地球上的绝对位置”问题。
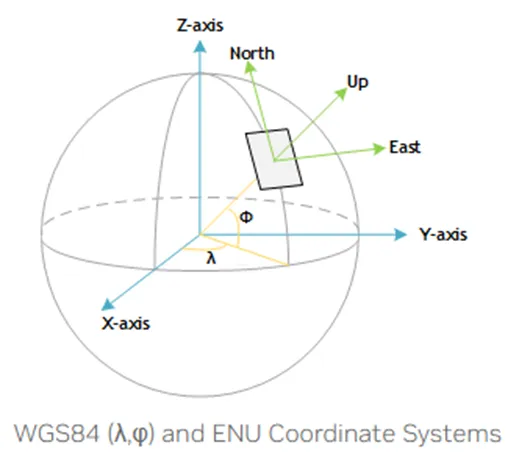
(1)WGS84大地坐标系
• 核心定义:全球通用的地心大地坐标系,是GNSS定位的原生输出基准,用经度、纬度、高程描述位置,原点为地球质心,长半轴6378137m,扁率1/298.257223563。
• 核心特点:全球统一绝对基准,无局部累计误差,但属于球面坐标系,无法直接用于平面几何计算。
• 应用范围:GNSS原始定位数据输出、高精地图绝对地理锚定、跨区域导航路径规划、全球位置标定。
(2)站心坐标系(ENU/NED坐标系)
• 核心定义:以固定参考点(通常为车辆定位天线初始位置)为原点的局部平面直角坐标系,自动驾驶主流使用ENU坐标系:X轴东向、Y轴向、Z轴天向(垂直地面向上),右手定则;航空领域常用NED坐标系(X轴北向、Y轴东向、Z轴地向),单位均为米(m)。
• 核心特点:将球面大地坐标转换为平面笛卡尔坐标系,适合局部区域位姿计算,坐标值直观,与全局坐标系衔接便捷,是组合导航高频位姿输出的基准。
• 应用范围:GNSS/IMU组合导航位姿解算、车身姿态(横滚/俯仰/航向)输出、局部定位与地图匹配、车辆运动补偿。
3.2 全局坐标系(世界坐标系)
• 核心定义:高精地图与全局路径规划的固定绝对基准,不随车辆运动变化,主流分为两类:
a. UTM坐标系(通用横轴墨卡托投影坐标系):将WGS84经纬度按6度分带投影到平面的直角坐标系,单位米,X轴东向、Y轴向,全球分带统一,投影变形小,适合大范围城市道路场景;
b. 自定义全局坐标系:以固定地理点为原点的ENU平面坐标系,原点永久固定,适合封闭园区、固定路线等小范围场景。
• 核心特点:全局唯一固定基准,无局部漂移,可实现多车协同、全局地图匹配,是自动驾驶长距离导航的核心参考。
• 应用范围:高精地图存储与匹配、全局路径规划、多车协同与V2X、交通规则全局映射、车辆全局位姿锚定。
二、核心坐标系特点与应用范围对比
坐标系名称 | 核心原点 | 轴向规则 | 单位 | 维度 | 核心特点 | 核心应用范围 |
像素坐标系 | 图像左上角 | u右、v下 | 像素 | 2D | 离散无物理尺度,与分辨率绑定 | 图像像素级处理、目标检测框输出 |
图像坐标系 | 相机主点(图像中心) | x右、y下 | 毫米 | 2D | 连续物理尺度,内参绑定 | 针孔相机建模、2D-3D映射桥梁 |
传感器坐标系 | 传感器光学/物理中心 | 各传感器硬件定义 | 米 | 3D | 与安装位姿刚性绑定,单传感器感知基准 | 单传感器目标检测、原始数据输出 |
车辆坐标系 | 车辆后轴中心(地面交点) | X前、Y左、Z上 | 米 | 3D | 车身刚性绑定,全链路核心枢纽 | 多传感器融合、运动学建模、车辆控制 |
ENU站心坐标系 | 固定地理参考点 | X东、Y北、Z天 | 米 | 3D | 局部平面直角坐标系,衔接球面与平面坐标 | 组合导航位姿解算、局部定位计算 |
WGS84大地坐标系 | 地球质心 | 经纬度+高程 | 度/米 | 3D | 全球绝对球面基准,无累计误差 | GNSS原始定位、全局地理锚定 |
UTM全局坐标系 | 投影带原点 | X东、Y北 | 米 | 3D | 全球统一平面基准,投影变形小 | 高精地图、全局路径规划、大范围导航 |
三、为什么必须进行坐标系转换?
坐标系转换是自动驾驶算法运行的核心前提,没有统一的空间基准,所有环境感知、定位、规划、控制都无法落地,核心原因分为六点:
1. 多传感器数据融合的必要前提
不同传感器安装在车辆不同位置(车顶激光雷达、挡风玻璃相机、前保险杠雷达),原始数据均基于自身传感器坐标系,不转换到统一基准,无法完成同一目标的感知数据融合。例如相机和激光雷达检测到的同一前车,只有都转换到车辆坐标系,才能确认目标同一性,融合位置、速度、轮廓信息,提升感知精度。
2. 实现2D图像到3D空间的语义映射
像素/图像坐标系是2D坐标系,无三维空间信息,只有通过坐标系转换(像素→图像→相机→车辆坐标系),才能将2D的目标检测框,转换为3D空间中相对车身的真实位置,进而判断障碍物的距离、碰撞风险,完成感知结果的空间语义落地。
3. 定位与地图匹配的核心基础
GNSS输出的WGS84经纬度是球面坐标,而高精地图、路径规划均基于平面直角坐标系,必须通过坐标投影转换,将球面坐标转换为全局平面坐标,再结合车辆姿态,将车辆坐标系与全局坐标系关联,才能实现车辆在高精地图中的精准定位,明确车辆在全局环境中的位置。
4. 规划与控制算法的落地要求
路径规划分为全局规划(全局坐标系)和局部规划(车辆坐标系):全局规划的路径需要转换到车辆坐标系,才能计算车辆与目标路径的横向偏差、航向偏差,进而输出转向、油门、刹车控制指令;车辆的运动状态(速度、加速度)基于车辆坐标系,需要转换到全局坐标系,才能更新车辆在全局地图中的位姿,形成规划-控制的闭环。
5. 消除安装误差与运动畸变
传感器安装存在平移、旋转偏差(外参),车辆行驶中存在颠簸、转向、俯仰带来的运动畸变,通过坐标系转换,可通过标定参数补偿安装偏差,通过IMU实时姿态数据,将不同时刻的传感器数据转换到同一时刻的车辆坐标系,消除运动畸变,保证感知数据的时空一致性。
6. 简化计算,提升算法实时性
球面大地坐标系不适合平面几何计算,2D像素坐标系不适合3D空间计算,通过坐标系转换,可将复杂的球面运算、多维度映射,转换到适配当前计算需求的笛卡尔坐标系中,大幅简化算法计算量,满足自动驾驶毫秒级的实时性要求。
四、怎样进行坐标系转换最合适?
自动驾驶坐标系转换的核心准则是:统一基准、减少层级、标定优先、时空同步、工程高效,下面从标准转换链路、分环节最优转换方法、工程最佳实践三个维度说明。
1. 自动驾驶标准转换链路(工程最优路径)
为避免多级转换带来的误差累计,工程上采用“单向收敛、双基准闭环”的转换链路,所有数据最终统一到车辆坐标系(局部基准)和全局坐标系(全局基准),链路如下:
• 正向感知-定位链路:像素坐标系 → 图像坐标系 → 传感器坐标系 → 车辆坐标系 → ENU站心坐标系 → 全局坐标系
• 反向规划-控制链路:全局坐标系 → ENU站心坐标系 → 车辆坐标系 → 车辆控制指令输出
2. 分环节最优转换方法
(1)感知层内转换:像素坐标系 ↔ 图像坐标系 ↔ 相机坐标系
• 核心原理:基于相机内参的针孔相机模型,完成2D像素与3D相机坐标的映射,工程上采用齐次坐标运算,避免分步计算的精度损失。
• 最优转换方法:
a. 先完成相机标定与畸变校正:提前通过标定板获取高精度内参(含畸变系数),先对图像做去畸变处理,再进行坐标转换,避免图像边缘的转换误差;
b. 齐次坐标矩阵运算:统一使用3x3内参矩阵完成一次性转换,适配GPU并行计算,提升实时性;
c. 深度优先匹配:单目相机2D→3D转换必须依赖深度信息,优先使用激光雷达点云配准获取的深度值,精度远高于单目深度估计。
(2)传感器坐标系 → 车辆坐标系转换
• 核心原理:基于传感器外参的刚体变换,包含3个平移自由度(X/Y/Z安装偏移)和3个旋转自由度(横滚/俯仰/偏航),通过4x4齐次变换矩阵完成转换,公式为:P_body = T_sensor2body · P_sensor,其中T为传感器到车身的外参矩阵。
• 最优转换方法:
a. 高精度联合标定优先:采用成熟标定方案(手眼标定、Autoware标定工具、全站仪标定)获取外参,保证平移误差<1cm,旋转误差<0.1°,传感器拆装、车辆剧烈颠簸后必须重新校验标定参数;
b. 收敛式转换,避免多级传递:所有传感器直接转换到车辆坐标系,禁止传感器之间的多级转换(如A→B→车身),减少误差累计;
c. 运动畸变实时补偿:结合IMU高频姿态数据,将不同时刻的传感器数据转换到同一时刻的车辆坐标系,消除车辆运动带来的点云/图像畸变;
d. 预计算静态矩阵:外参为固定值,提前预计算矩阵及其逆矩阵,避免实时运算的耗时。
(3)车辆坐标系 ↔ ENU站心坐标系转换
• 核心原理:基于组合导航输出的车辆全局位姿的刚体变换,位姿包含ENU坐标系下的车辆原点坐标,以及车辆相对站心系的横滚、俯仰、航向角,通过4x4齐次变换矩阵完成转换。
• 最优转换方法:
a. 采用紧耦合GNSS/IMU组合导航:获取100Hz以上的高频高精度位姿,优先使用双天线GNSS方案,保证航向角误差<0.1°(航向角是长距离转换误差的核心来源);
b. 固定站心系原点:将车辆上电初始位置设为站心系原点,避免原点漂移导致的全局坐标累计误差;
c. 全姿态引入:坡道、颠簸路面必须引入横滚、俯仰角,禁止直接近似为0,避免Z轴方向的转换误差。
(4)ENU站心坐标系 ↔ 全局坐标系转换
• 核心原理:大地坐标投影转换+固定刚体平移,WGS84经纬度通过墨卡托投影转换为UTM坐标,自定义全局坐标系直接通过固定平移矩阵与ENU坐标系转换。
• 最优转换方法:
a. 全系统基准统一:高精地图、规划算法、定位系统必须使用同一套全局坐标系(同一UTM分带/同一自定义原点),避免跨分带投影带来的误差;
b. 成熟库适配:使用PROJ等开源专业库完成投影转换,禁止自行实现投影公式,避免计算错误与精度损失;
c. 场景适配选型:小范围封闭园区优先使用自定义ENU全局坐标系,计算简单无投影变形;大范围城市道路优先使用UTM坐标系,保证与高精地图的全局一致性。
3. 工程落地最佳实践与避坑要点
• 时空同步是前提:所有参与转换的数据必须做硬时间同步(PTP/GPS时钟同步),时间戳误差<1ms,否则运动场景下会出现严重的转换漂移;
• 全系统轴向与定则统一:全链路统一右手定则,优先采用ISO 8855标准的X前Y左Z上轴向定义,避免符号错误导致的转换失效(工程最常见坑);
• 静态/动态转换分离:传感器→车身的静态转换预计算矩阵,车身→全局的动态转换实时更新矩阵,分开处理提升运算效率;
• 实时校验与异常处理:对转换结果做闭环校验,例如同一目标多传感器转换后的坐标偏差超过阈值时,触发标定参数校验与异常告警;
• 精度分层适配:感知融合环节优先保证转换精度,规划控制环节在保证精度的前提下优化运算效率,平衡实时性与准确性。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
