理想基座模型负责人詹锟:下一代自动驾驶大模型MindVLA-o1
- 2026-03-16 23:31:44
理想基座模型负责人詹锟:下一代自动驾驶大模型MindVLA-o1戳我-> 领取自动驾驶近30个方向学习路线 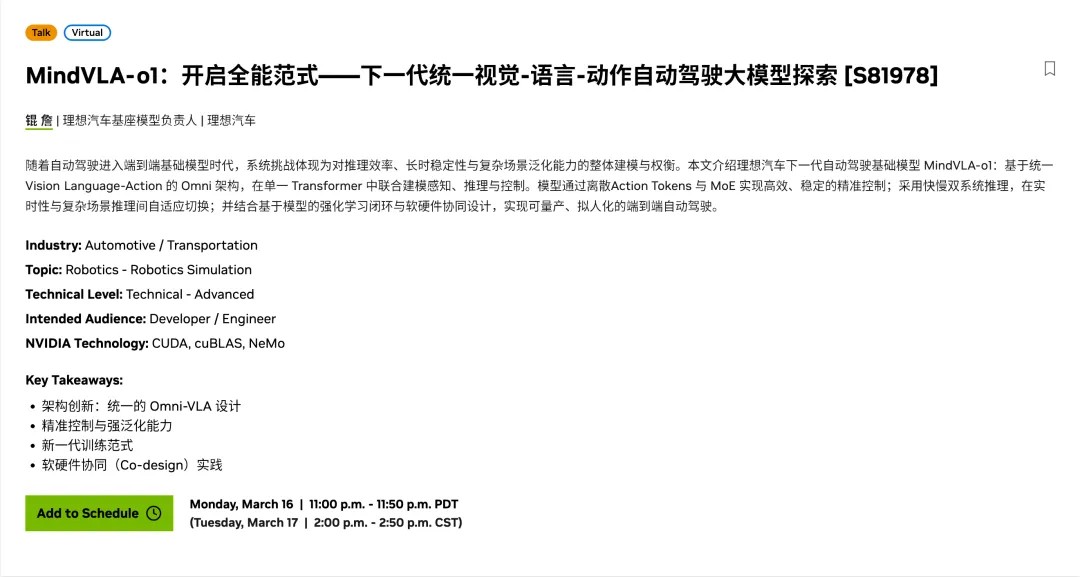


点击下方卡片,关注“自动驾驶之心”公众号
编辑 | 自动驾驶之心
本文只做学术分享,如有侵权,联系删文
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
下周二下午14点至14点50分,理想汽车基座模型负责人詹锟老师将在英伟达GTC 2026上介绍理想最新一代VLA自驾大模型的进展,即MindVLA-o1。
主题介绍:随着⾃动驾驶进⼊端到端基础模型时代,系统挑战体现为对推理效率、⻓时稳定性与复杂场景泛化能⼒的整体建模与权衡。本⽂介绍理想汽⻋下⼀代⾃动驾驶基础模型 MindVLA-o1:基于统⼀ Vision-Language-Action 的 Omni 架构,在单⼀ Transformer 中联合建模感知、推理与控制。模型通过离散Action Tokens 与 MoE 实现⾼效、稳定的精准控制;采⽤快慢双系统推理,在实时性与复杂场景推理间⾃适应切换;并结合基于模型的强化学习闭环与软硬件协同设计,实现可量产、拟⼈化的端到端⾃动驾驶。
从主题的关键点上看:
架构创新:理想自研的有LinkVLA,以及小米最近提出的基于扩散语言模型实现VLA的框架DriveFine; 训练范式:猜测应该是闭环强化学习训练相关的内容,理想自研的有AD-R1; 软硬件协同:这部分应该是自研芯片方面的进展,估计要上车了。
此外,我们筹备了一个GTC技术交流群,感兴趣的同学注册完成之后找助理进群,期间会在群内和大家交流~
其他值得关注的主题:
NVIDIA全球副总裁吴新宙:迈向 L4 级自动驾驶之路 — 打造可规模化、安全的自动驾驶汽车与 Robotaxi; NVIDIA高级研究总监Marco Pavone:从研究到量产 — Alpamayo 如何加速自动驾驶汽车开发; 特斯拉AI副总裁Ashok Elluswamy:以安全为中心的AI,打造自动驾驶的下一个时代; 小米汽车HAD算法和交付负责人陈光:端到端用于自动驾驶的强化认知框架; 吉利汽车集团CTO李传海:以WAM为核心构建全域AI 2.0,AI+车技术实践分享;
自动驾驶之心

本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

