最近自动驾驶圈一个很有冲击力的画面,不是特斯拉,也不是 Waymo,而是黄仁勋亲自坐进一辆搭载英伟达方案的奔驰 CLA,由英伟达汽车业务副总裁新宙陪同,在旧金山城市道路上公开演示自动驾驶能力。公开信息显示,这段演示路线从加州 Woodside 开进旧金山城区,视频时长约 22 分钟,过程中出现了施工区、双排停车、锥桶压缩车道等典型复杂城市场景。英伟达方面表示这段行程没有发生接管。
这件事为什么值得关注?因为它释放的信号不是“英伟达也能跑自动驾驶 demo 了”,而是英伟达已经不满足只做自动驾驶芯片供应商,而是在往“自动驾驶全栈基础设施平台”升级。按照 NVIDIA 在 CES 2026 的官方说法,奔驰新一代 CLA 已开始搭载其 DRIVE AV 全栈软件、AI 基础设施和车端计算平台,今年将在美国率先落地增强型 Level 2 点到点驾驶辅助能力,并支持后续通过 OTA 持续升级 MB.Drive Assist Pro。换句话说,黄仁勋这次坐进车里展示的,不只是一个功能,而是一条清晰的商业路径:从车端算力,到感知融合,到智驾软件,到 OTA 升级,再到更高阶自动驾驶演进,英伟达要一起打包卖给车厂。
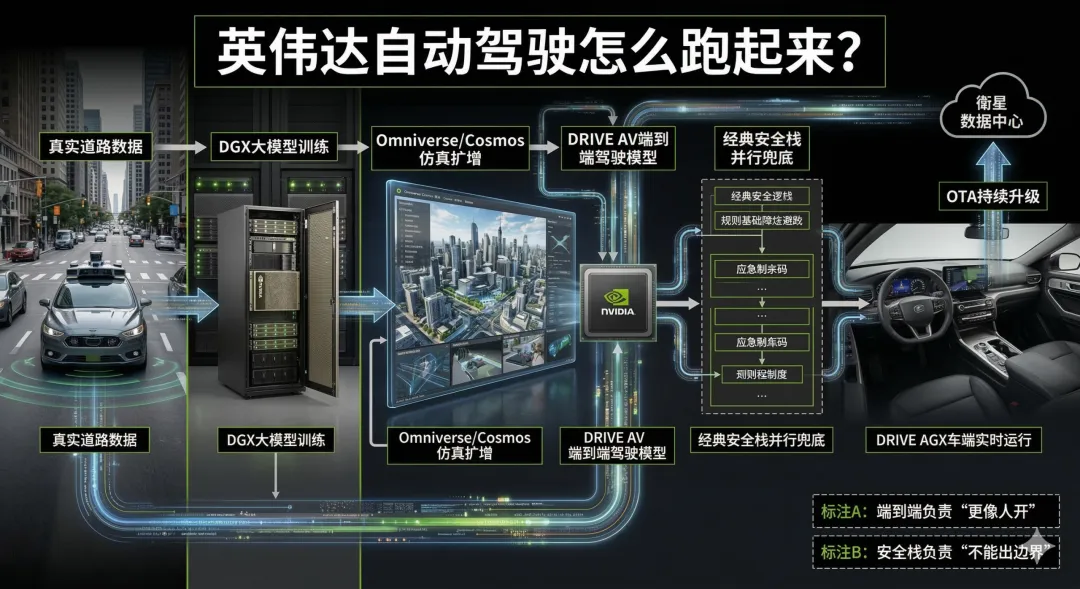
更关键的是它背后的技术路径,已经明显不是传统那种“感知、规划、控制”纯规则堆叠模式了。吴宇宙在采访里讲得很明确:英伟达走的是“端到端 AI 模型 + 经典安全栈”双轨路线,既用 end-to-end 模型提升驾驶自然度和复杂场景应对能力,又保留 classical stack 去做安全约束和工程验证;同时在传感器上并不押纯视觉,而是走摄像头 + 雷达 + 超声波,高阶再叠加激光雷达的冗余路线。为了补齐真实里程不如特斯拉、Waymo 的短板,英伟达还在用 NuRec 神经重建 + augmentation 场景扩增 做大规模仿真训练。再往上一层,它又推出了 Alpamayo:10亿参数Vision-Language-Action (VLA)推理模型(基于Cosmos-Reason骨干 + Diffusion轨迹解码器),用于解决长尾场景。英伟达真正想证明的是:未来自动驾驶的竞争,不只是看谁路测里程多,而是看谁能把“大模型、仿真、车端算力和安全闭环”拼成一整套量产能力。
如果再往下看一步,你会发现这对整个汽车行业的杀伤力其实很大。因为一旦自动驾驶平台开始被做成“标准化全栈能力包”,未来车企比拼的重点,就不只是“有没有智驾”,而是谁能更快把智驾接进自己的电子电气架构、操作系统、OTA 体系和产品迭代节奏里。这也是为什么这次黄仁勋亲自上车,比一场发布会更有意义:发布会讲的是概念,上路演示讲的是可信度;芯片讲的是算力,城市道路演示讲的是系统能力。对车企来说,这背后最大的变化不是多了一颗更强的芯片,而是英伟达正在试图成为下一代汽车智能化的“底层入口”。英伟达要做的,已经不是智驾供应商,而是未来汽车智能系统的总平台。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
