🚗 自动驾驶系统推理综述:开放挑战与新兴范式
副标题:认知层级框架+七大推理挑战,解锁L4+自动驾驶的核心瓶颈
导读
直击高阶自动驾驶(AD)发展的核心范式转移:当前AD系统已突破感知层面的基础瓶颈,却陷入“结构化场景表现优异、长尾场景与社交交互频繁失效”的推理能力困境——类人判断(如复杂路口让行、突发风险预判、多车社交博弈)成为规模化落地的根本桎梏。尽管大语言模型(LLMs)与多模态大语言模型(MLLMs)为AD注入强大认知引擎,有望从“模式匹配”迈向“真正理解”,但行业缺乏系统性框架指导推理能力与AD系统的深度融合。为此,清华大学、香港大学等机构联合在TMLR发表重磅综述,首次提出驾驶任务的认知层级(Cognitive Hierarchy)分解框架,系统梳理七大核心推理挑战(如响应性-推理权衡、社交博弈推理),并从“系统中心”(智能体架构)与“评估中心”(验证方法)双视角,全面剖析现有技术现状,揭示“玻璃箱”可解释性代理的发展趋势。该综述首次将推理从模块化组件提升至AD系统的认知核心,为构建“推理驱动”的高阶自动驾驶系统提供了“任务分解-挑战剖析-范式引领”的全景式指南。
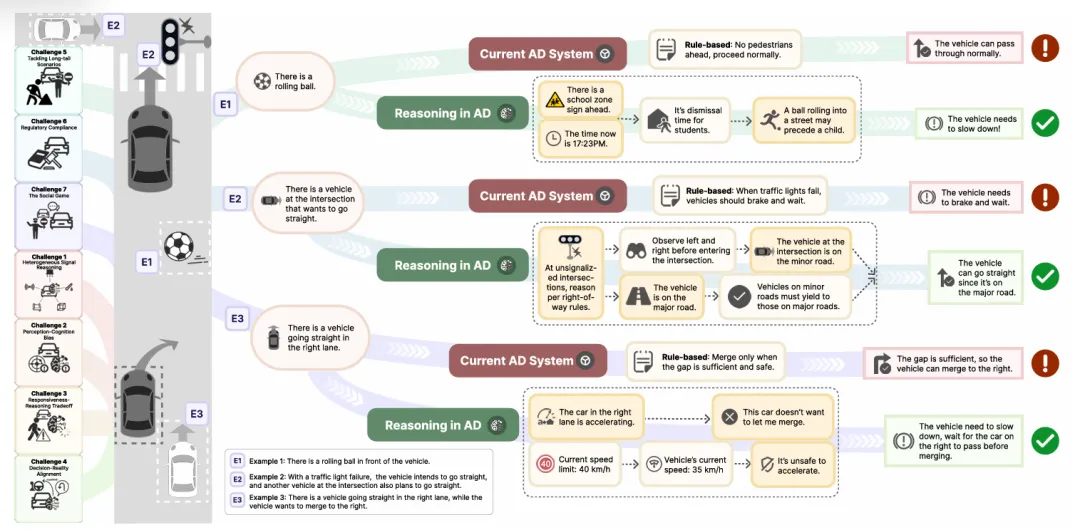
图1 动机:为什么显式推理在自动驾驶中至关重要。左栏总结了我们分类法中的七个反复出现的推理挑战。右栏展示了三个说明性场景(E1-E3),对比了一个具有代表性的、由基于规则的启发式方法驱动的当前自动驾驶系统与一种通过显式推理(虚线框)整合上下文信号、交通规则和多智能体交互线索的自动驾驶推理方法。这种对比凸显了脆弱的策略如何可能产生不安全或过于保守的行为(红色),而结构化推理则支持符合上下文的决策(绿色)。
推荐理由
- 核心价值:首篇系统覆盖自动驾驶推理的综述,提出认知层级框架与七大推理挑战分类,双视角梳理180+研究,揭示推理从“模块组件”到“认知核心”的范式转变,为L4+自动驾驶提供统一理论基础;
- 落地意义:明确不同AD场景(如高速巡航、城市路口)的推理需求与适配方法,为工业界提供“挑战-技术”匹配指南,降低推理能力工程化落地成本;
- 学术意义:建立“认知层级-推理挑战-系统方法-评估基准”的完整研究体系,指出神经符号架构、社交协商模型等关键方向,为后续研究划定清晰边界。
1 业务背景与技术背景
1.0 业务背景:高阶AD的推理能力桎梏
随着感知技术(相机、LiDAR、传感器融合)的成熟,AD系统在结构化道路(如高速路、封闭园区)中已能实现稳定的车道保持、跟车行驶等基础功能。但高阶自动驾驶(L4及以上)要求系统应对开放道路的无限复杂性:
- 长尾场景决策:极端天气、道路施工、突发障碍物等低概率高风险场景,缺乏固定模式可匹配,需类人逻辑推理;
- 社交交互博弈:无信号路口让行、车辆加塞协商、行人意图预判等,需理解其他交通参与者的行为动机并动态博弈;
- 多目标权衡:安全、效率、舒适性的动态平衡(如紧急避障时兼顾乘客舒适与行人安全),需复杂价值判断。
现有AD系统多将推理作为“辅助模块化组件”,缺乏全局认知核心,导致在上述场景中决策僵化、易引发安全风险,成为高阶AD规模化落地的核心障碍——用户对“类人驾驶判断”的需求,推动行业从“感知优先”向“推理优先”转型。
1.1 技术背景:现有工作局限与本文突破
当前自动驾驶推理相关研究存在分散化、无体系的局限,本文针对性实现多维度突破:
| | |
|---|
| 将推理拆分为路径规划、意图预测等独立模块,缺乏全局认知核心,难以应对复杂交互 | 首次将推理提升为AD系统的认知核心,提出认知层级框架,实现驾驶任务的系统化分解 |
| 研究分散于单一推理场景(如让行决策),无统一框架指导系统设计与集成 | 构建认知层级+七大核心推理挑战的理论体系,为推理驱动AD系统提供设计蓝图 |
| 盲目将LLM嵌入AD系统,未解决低延迟、安全性、可解释性等适配问题 | 双视角综述LLM集成架构,明确“玻璃箱”可解释性代理的发展趋势,提供集成指导 |
| 依赖传统感知/规划指标(如碰撞率、L2误差),无法量化推理能力 | 系统梳理推理导向的评估方法,指出标准化评估基准的缺失,为能力验证提供方向 |
2 核心概念:关键定义与技术体系
| | |
|---|
| 认知层级(Cognitive Hierarchy) | 核心:按认知与交互复杂度,将驾驶任务从低到高分为四级(具体层级需结合论文展开,如反应式层→规则遵循层→意图推理层→价值权衡层);核心逻辑:层级越高,对推理能力要求越强,交互复杂度越高;核心价值:实现驾驶任务的模块化分解与推理能力的递进式优化 | AD系统推理模块分层设计、能力评估分级、技术路线规划 |
| 2. 社交博弈推理(多交通参与者意图预判与交互); | AD系统推理能力瓶颈定位、技术突破方向识别、场景化推理策略设计 |
| ①系统中心视角(System-Centric):分析推理驱动AD系统的架构设计(如LLM集成方式、模块化vs端到端、感知-推理-规划联动);②评估中心视角(Evaluation-Centric):梳理推理能力的验证方法(如仿真场景、真实路测、逻辑一致性测试) | AD系统架构选型、推理能力评估方案设计、现有技术优劣对比 |
| 定义:推理过程可解释、决策逻辑可追溯、错误可定位的AD智能体;核心特性:区别于“黑箱”端到端模型,兼顾推理能力与安全合规性 | 高阶AD系统落地、安全审计、故障溯源、用户信任建立 |
3 核心内容:认知层级、推理挑战与现状分析
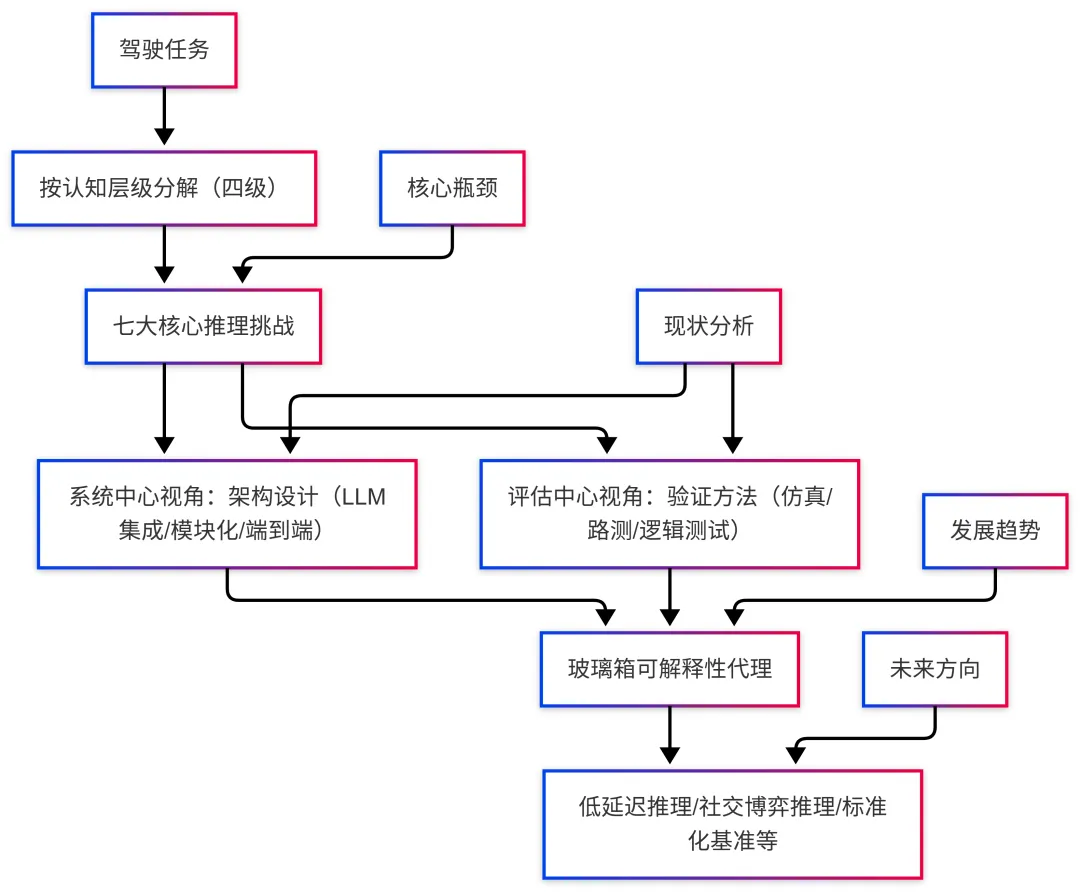
3.1 整体技术框架
本文构建“驾驶任务分解(认知层级)→核心瓶颈定位(七大挑战)→现状双视角分析→未来范式引领”的全链路框架,如下:
3.2 核心模块技术细节
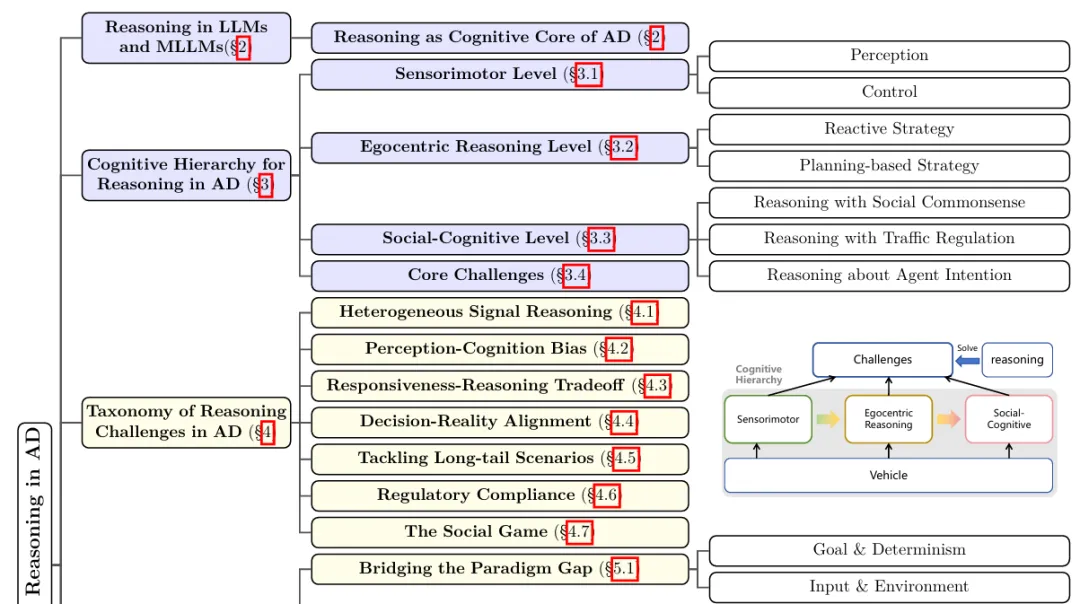
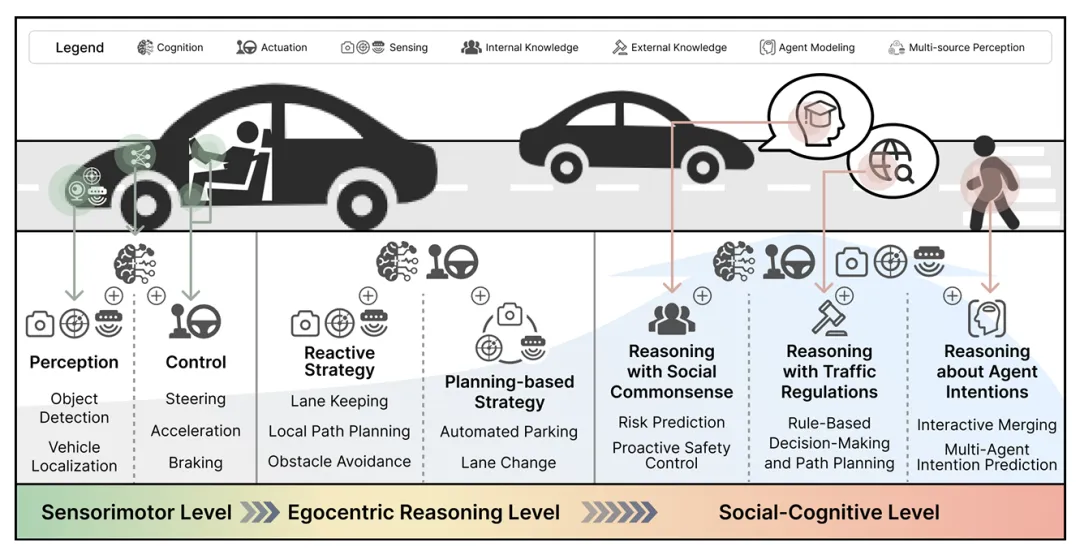
图3:所提出的自动驾驶推理认知层次结构。该框架将整体的“驾驶”任务分解为认知和交互复杂性递增的三个不同层次:(1)感觉运动层,(2)自我中心推理层,以及(3)社会认知层。
3.2.1 认知层级(Cognitive Hierarchy):驾驶任务的系统化分解
论文首次将复杂驾驶任务按“认知复杂度+交互频率”分为四级,从低到高对推理能力要求逐步提升:
| | | |
|---|
| | | 无需深度推理,仅需规则匹配(如“前方有障碍物→减速”) |
| Level 2:规则遵循层(Rule-Following) | | | 规则推理(如“红灯停绿灯行”“让右方道路来车”),无需意图预判 |
| Level 3:意图推理层(Intention-Inferring) | | | 一阶意图推理(如“对向车辆减速→可能让行”“行人张望→可能横穿”) |
| Level 4:价值权衡层(Value-Balancing) | | 紧急避障(安全vs舒适)、极端天气路径选择、故障工况应急决策 | 高阶价值推理(如“优先保障行人安全>车辆损伤>乘客舒适”)、因果推理、风险评估 |
3.2.2 七大核心推理挑战深度剖析
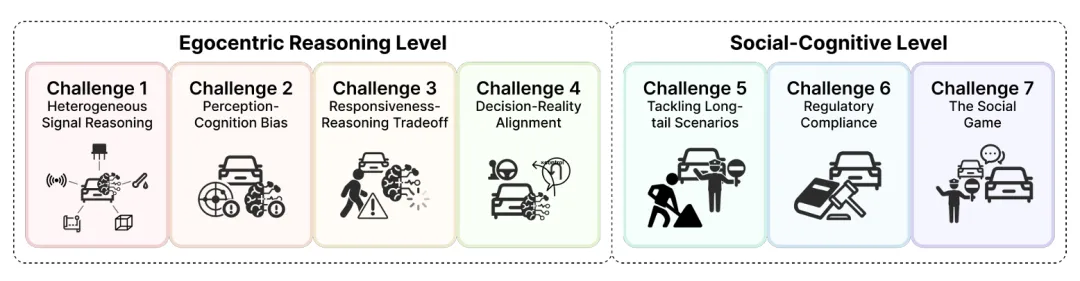
图4:自动驾驶中七个核心推理挑战的分类。这些挑战按其相应的认知水平分类:C1-C4属于自我中心推理水平,而C5-C7属于社会认知水平。每个编号场景都说明了文中分析的特定挑战。
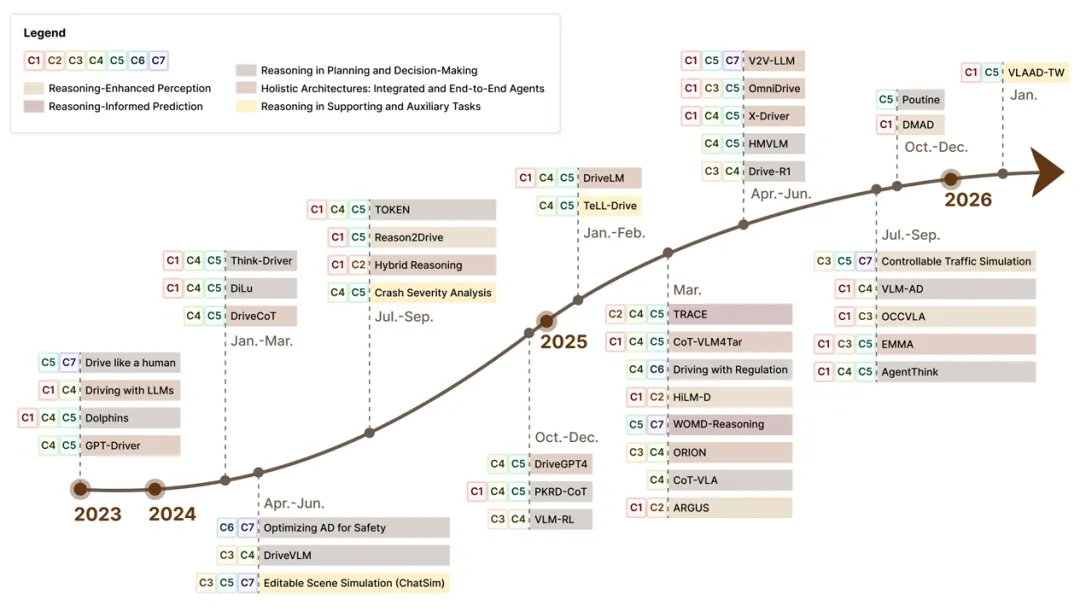
图5:自动驾驶主要方法的时间演变。这条时间线突出显示了该领域的快速发展,并为第节中介绍的主题复杂性分类法提供了历史背景。
响应性-推理权衡(Responsiveness-Reasoning Trade-off):
- 核心矛盾:LLM-based深度推理存在高延迟(百毫秒级),而AD系统需毫秒级决策(如紧急避障),二者难以兼顾;
- 典型案例:突发障碍物时,深度推理最优避障路径会导致决策延迟,简单反应式决策可能非最优但安全。
社交博弈推理(Social-Game Reasoning):
- 核心难点:交通参与者的行为具有不确定性与博弈性(如加塞时的“试探-回应”),需类人博弈策略,而非固定规则;
- 技术缺口:现有系统缺乏对“互惠性”“信任度”的建模,难以应对复杂社交交互(如无信号路口多车让行协商)。
长尾场景泛化推理(Long-Tail Generalization Reasoning):
- 核心痛点:长尾场景(如道路施工+暴雨+行人横穿)数据稀缺,模式匹配失效,需基于核心逻辑推导解决方案;
- 现有局限:依赖大规模数据训练的端到端模型泛化能力差,缺乏“举一反三”的推理能力。
多目标价值权衡推理(Multi-Objective Value-Balancing Reasoning):
- 核心需求:安全、效率、舒适性、合规性等目标的动态冲突平衡,需明确价值优先级;
- 技术挑战:价值优先级随场景变化(如紧急场景安全优先,拥堵场景效率优先),需灵活可调的推理框架。
可解释性推理(Explainable Reasoning):
- 核心约束:AD系统需向用户、监管机构解释决策逻辑(如“为何选择避让而非减速”),确保安全合规;
- 现有问题:端到端模型为黑箱,LLM推理过程难以追溯,缺乏结构化解释机制。
动态环境自适应推理(Dynamic Environment Adaptive Reasoning):
- 核心要求:环境动态变化(如天气突变、道路临时封闭)时,推理策略需快速调整;
- 技术缺口:现有推理模块固化,难以自适应环境参数变化,鲁棒性不足。
- 核心意义:区分“相关”与“因果”,避免模式误匹配(如“雨天刹车距离变长”是因果关系,而非单纯数据关联);
- 现有局限:多数系统依赖统计关联学习,缺乏因果建模能力,易在陌生场景中决策失准。
3.2.3 双视角现状分析
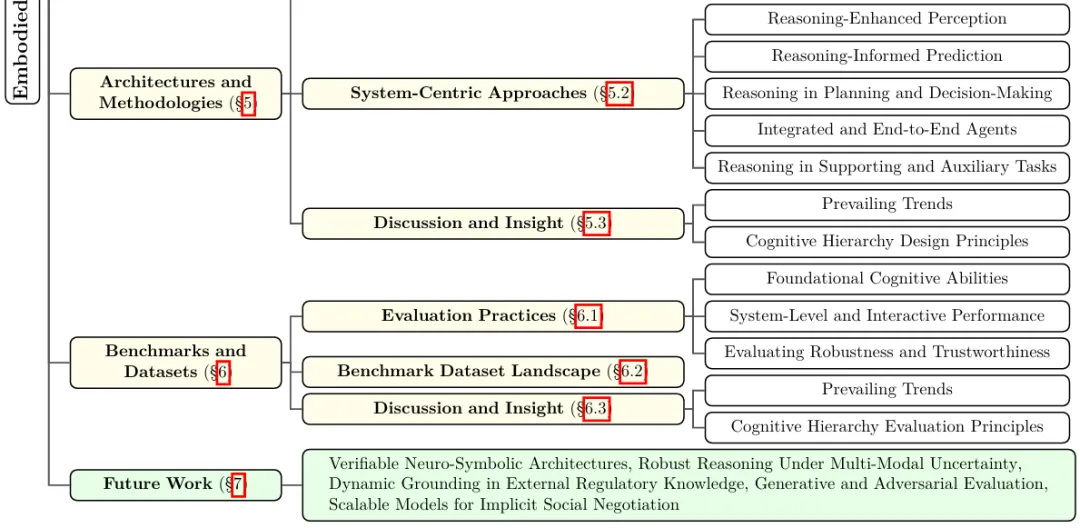
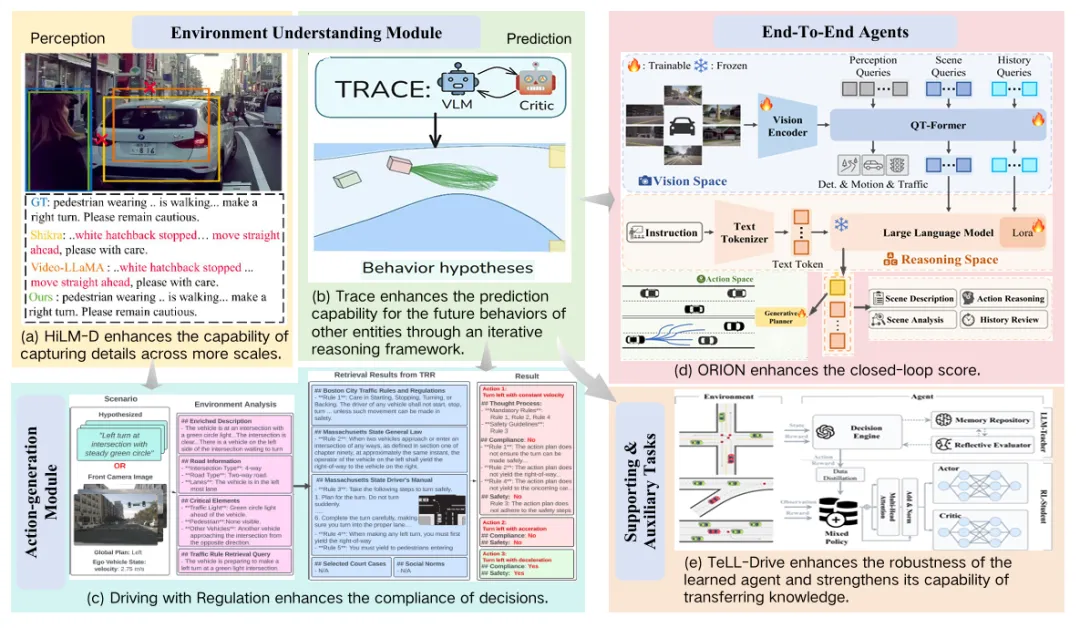
图6:在各种现有方法中,我们选取并呈现了五个在自动驾驶(AD)系统不同维度上增强能力的案例:HiLM-D(Ding等人,2025a)侧重于推理增强型感知;(b)Trace(Puthumanaillam等人,2025)侧重于推理知情型预测;(c)带法规的驾驶(Cai等人,2024)侧重于规划与决策中的推理;(d)ORION(Fu等人,2025)侧重于整体架构;(e)Tell-Drive(Xu等人,2025a)侧重于支持与辅助任务中的推理。
(1)系统中心视角:推理驱动AD系统的架构设计
现有架构可分为三类,各有优劣与适用场景:
| | | | |
|---|
| 推理模块独立,与感知、规划模块分离(如“感知→意图推理→路径规划→控制”) | | | |
| 感知-推理-规划一体化训练,无明确推理模块,模型自主学习决策逻辑 | | | TransFuser、Waymo Driver(部分) |
| LLM/MLLM集成架构(LLM-Enhanced) | 将LLM/MLLM作为认知核心,融合感知特征,实现推理-规划一体化 | | | |
- 发展趋势:从“模块化黑箱化”向“玻璃箱LLM集成架构”演进——保留LLM的推理能力,通过结构化约束(如规则注入、因果建模)提升可解释性与安全性。
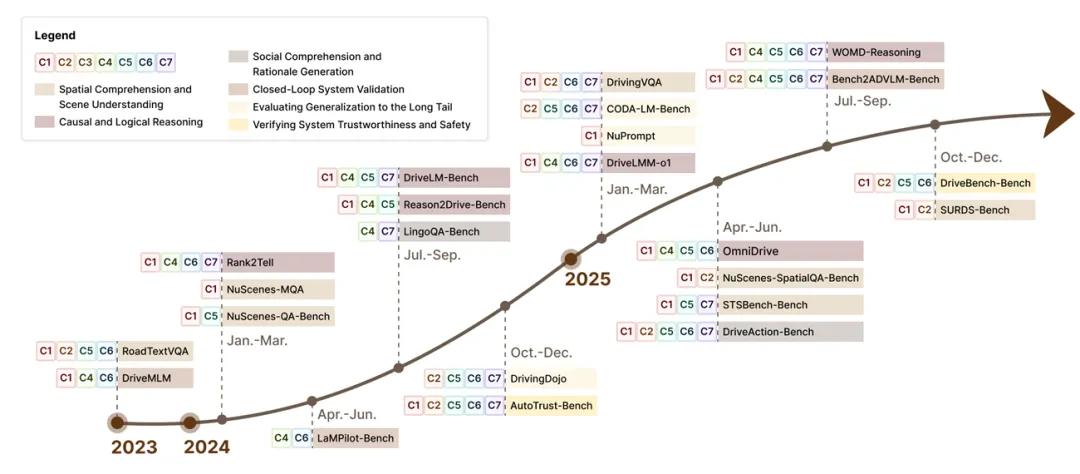
图7:自动驾驶推理的基准和数据集的时间演化。该时间线展示了以评估为中心的研究的快速发展,并为第X节中讨论的主题分类法提供了历史背景。
(2)评估中心视角:推理能力的验证方法
现有评估方法难以全面量化推理能力,存在显著局限:
| | | |
|---|
| | | 难以覆盖长尾场景、无法量化推理逻辑的合理性、成本高 |
| 设计矛盾场景或反事实案例,验证推理逻辑的一致性(如“红灯时是否会违规通行”) | | |
| | | |
- 核心缺口:缺乏“推理导向”的标准化评估基准——需同时覆盖动态交互、长尾场景、逻辑一致性,实现推理能力的客观量化。
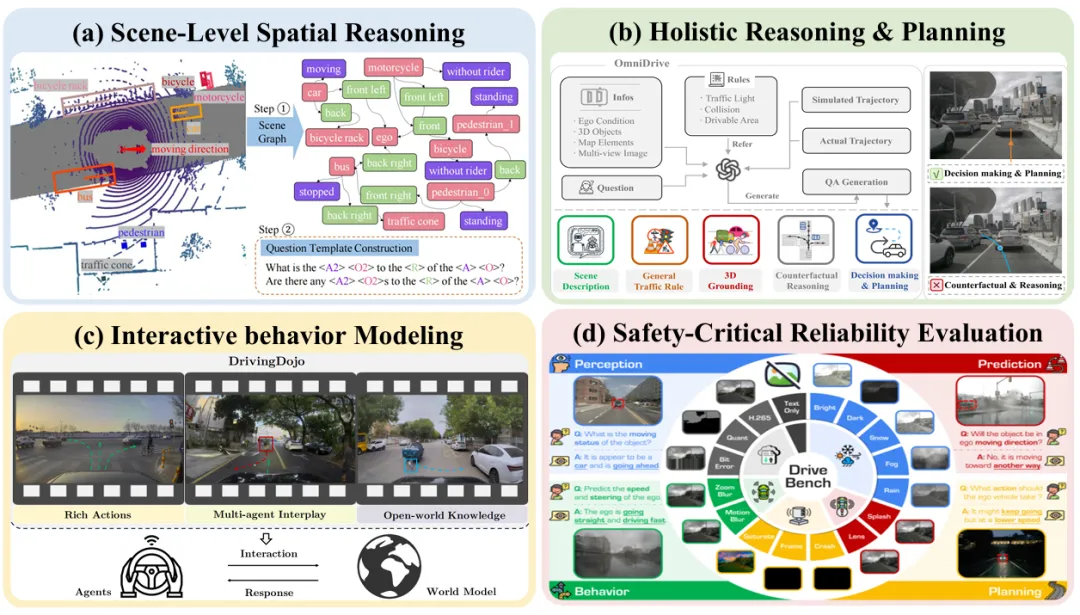
图8:在各种现有基准中,我们重点介绍四个被广泛使用的案例:(a)用于场景级空间推理的NuScenes-QA(Qian等人,2024);(b)用于整体推理和规划的OmniDrive(Wang等人,2025b);(c)用于交互式行为建模的Driving Dojo(Wang等人,2024e);(d)用于安全关键可靠性评估的DriveBench(Xie等人,2025)。
图9:自动驾驶基准生态系统的谱系图。我们展示了关键数据集之间的衍生和继承关系,着重说明了基础平台(例如,NuScenes)如何启发了一系列专门用于评估特定推理能力的专业基准。
3.3 关键技术创新点(综述核心贡献)
- 认知层级分解框架:首次将驾驶任务按认知复杂度分层,为推理能力的模块化设计与递进式优化提供统一理论基础,打破任务不可拆分的传统认知。
- 七大核心推理挑战提炼:系统性梳理AD推理的关键瓶颈,精准定位响应性-推理权衡、社交博弈推理等核心痛点,为技术突破提供明确靶点。
- 双视角全景综述:从系统架构与评估方法双维度,全面剖析现有推理驱动AD系统的优劣,揭示“玻璃箱”可解释性代理的发展趋势。
- 范式转型引领:明确提出“推理从模块化组件升级为认知核心”的范式,为高阶AD系统从“感知驱动”向“推理驱动”转型提供全景式路线图。
4 现状对比与趋势分析
4.1 三类架构的推理能力对比
- 关键结论:LLM集成架构在高阶认知层级(L3-L4)表现最优,但延迟是主要短板;模块化架构在可解释性与延迟上占优,但高阶推理能力不足;端到端架构延迟最低,但可解释性差,难以满足合规要求。
4.2 核心发展趋势
- 低延迟LLM推理优化:通过模型轻量化(量化、剪枝)、推理加速(TensorRT)、分层推理(简单场景快速反应,复杂场景深度推理),缓解响应性-推理权衡;
- 玻璃箱LLM集成:将LLM作为推理核心,结合规则注入、因果建模、结构化输出,实现“推理能力强+可解释性高”的平衡;
- 社交博弈推理建模:融合博弈论、强化学习,建模交通参与者的意图与交互策略,提升复杂社交场景的决策能力;
- 推理导向的标准化评估基准:构建覆盖动态交互、长尾场景、逻辑一致性的评估数据集与指标,实现推理能力的客观量化。
5 挑战与未来方向
5.1 核心挑战(七大推理挑战的延伸)
- 延迟与推理深度的动态平衡:如何根据场景复杂度,自适应调整推理深度与响应速度,避免“过度推理导致延迟”或“推理不足导致决策失准”;
- 社交博弈的泛化性建模:交通参与者的行为具有个体差异(如激进vs谨慎驾驶),如何构建泛化性强的博弈模型,适配不同行为模式;
- 因果推理与统计关联的区分:如何让AD系统从“数据关联学习”转向“因果逻辑推理”,避免在陌生场景中因模式误匹配导致决策失效;
- 推理能力的标准化评估:缺乏统一的评估基准与指标,难以客观对比不同系统的推理能力,阻碍技术迭代;
- LLM与AD系统的安全融合:LLM可能产生幻觉、违规决策,如何通过约束机制确保推理结果的安全性与合规性。
5.2 未来研究议程
- 分层自适应推理框架:设计“快速反应层+深度推理层”的混合架构,简单场景走快速反应通道(低延迟),复杂场景激活深度推理通道(高精准);
- 社交意图与博弈建模:融合多模态感知特征(如车辆轨迹、行人姿态)与LLM的语义推理能力,构建“意图识别-博弈策略-决策生成”的端到端流水线;
- 因果推理注入:将因果推断技术(如因果图、反事实推理)融入AD系统,提升长尾场景的泛化能力与决策可靠性;
- 推理导向的评估基准:构建包含动态交互、长尾场景、逻辑矛盾案例的标准化数据集,设计“推理准确率、逻辑一致性、决策可解释性”等核心指标;
- LLM安全增强机制:通过交通规则注入、安全约束微调、对抗性训练,抑制LLM的幻觉与违规输出,确保推理结果的安全合规。
6❓ 核心QA(基于论文内容)
Q1:认知层级框架的设计逻辑是什么?为何社会认知层是L4+的核心瓶颈?
A1:设计逻辑源于人类驾驶的认知发展规律——从基础的“感知-动作映射”(感觉运动层),到“自我中心的多智能体交互”(自我中心层),最终到“融入社会规则与意图建模”(社会认知层),层层递进且依赖前一层能力。社会认知层成为瓶颈的原因:1. 该层需要类人常识(如“滚球可能伴随儿童”)、动态法规理解与隐含意图推断,无法通过单纯数据驱动习得;2. 现有系统缺乏统一的社会认知模型,行为易出现“不合时宜”的问题(如并道时无社交暗示),难以融入混合交通流。
Q2:七大推理挑战之间存在怎样的关联?如何优先级排序?
A2:挑战间存在“基础→高阶”的依赖关系:C1(异构信号推理)是所有后续推理的前提(无一致世界模型则无法推理);C2(感知-认知偏差)与C3(响应性-推理权衡)是工程落地的核心障碍;C4-C7是从技术可行性到社会可接受性的进阶需求。优先级排序需结合应用场景:1. 量产L3系统:优先解决C1-C4(基础推理能力与落地可行性);2. L4试点系统:重点突破C5-C6(长尾场景与法规合规);3. L5目标系统:必须攻克C7(社交博弈),实现类人驾驶行为。
Q3:如何缓解“响应性-推理权衡”这一本质矛盾?
A3:核心思路是“双进程架构”与“动态激活”:1. 快速响应进程:保留传统模块化流水线,处理突发场景(如急刹车),确保毫秒级响应;2. 深度推理进程:基于LLM/MLLM,处理复杂场景(如并道协商、长尾事件),非实时但提供策略指导;3. 动态仲裁机制:根据场景复杂度(如道路类型、交通密度)与不确定性(如传感器噪声、意图模糊),自适应分配决策权重。例如,高速突发障碍触发快速响应进程,而城市道路并道则激活深度推理进程生成社交可接受的策略。
Q4:未来研究的核心方向为何聚焦神经符号架构与社交协商模型?
A4:这两个方向直接针对核心瓶颈:1. 可验证神经符号架构:结合神经网络的感知能力与符号系统的逻辑推理能力,既保证物理接地(解决C4),又提供形式化验证(缓解C3的延迟矛盾),是突破“推理-控制”鸿沟的关键;2. 社交协商模型:现有方法仅关注法规合规(C6),而真实驾驶中的“让行暗示”“意图传递”等隐含社交规则(C7)尚未被充分建模,该方向能让AD系统从“合法”走向“合群”,是融入混合交通流的核心前提。
7 总结
核心价值
- 范式革新:首次将推理从AD系统的“模块化辅助组件”提升为“认知核心”,提出认知层级分解框架,打破高阶自动驾驶的推理能力困境,开创“推理驱动AD”的新范式。
- 系统梳理价值:全面提炼七大核心推理挑战,双视角剖析现有技术现状,清晰呈现各架构的优劣与适用场景,为研究者与工程师提供统一的技术参考框架。
- 研究导向引领:明确低延迟推理、玻璃箱集成、社交博弈建模、标准化基准等核心研究方向,为高阶AD系统的长期发展划定核心范围,加速技术迭代与规模化落地。
- 安全合规支撑:强调可解释性推理与“玻璃箱”代理的重要性,为AD系统的安全审计、故障溯源、监管合规提供技术指导,解决黑箱模型的落地障碍。
总结金句
👉 “本综述以认知层级为纲、七大推理挑战为目,双视角全景剖析自动驾驶推理技术的现状与趋势,首次将推理提升为AD系统的认知核心,为构建‘类人判断、安全可靠、可解释合规’的高阶自动驾驶系统提供了全景式指南,引领行业从‘感知优先’向‘推理优先’的范式转型。”
8 原论文信息
- 论文题目:A Survey of Reasoning in Autonomous Driving Systems: Open Challenges and Emerging Paradigms
- 作者团队:Kejin Yu、Yuhan Sun、Taiqiang Wu等(清华大学、华东师范大学、香港大学联合研发)
- 发表状态:Transactions on Machine Learning Research(TMLR),2026年3月,OpenReview链接:https://openreview.net/forum?id=XwQ7dc4bqn
- 核心创新:驾驶任务的认知层级分解框架、七大核心推理挑战、系统中心与评估中心双视角综述、玻璃箱可解释性代理发展趋势
- 首次提出四级认知层级,系统化分解驾驶任务的推理需求;
- 提炼七大核心推理挑战,精准定位AD推理能力的关键瓶颈;
- 双视角全面剖析现有推理驱动AD系统的架构与评估方法;
- 数据支撑:基于大量现有研究(含LLM集成AD系统、模块化推理架构、评估基准等)的系统性梳理与对比分析;