盲区监测功能定义:
实时监测驾驶员视野盲区,并在其盲区内出现其他道路使用者时发出提示或警告信息
翻译出来就是,当你开车的时候,不管是直行、左转、右转状态,一旦在车辆盲区范围内出现别的道路使用者(行人、两轮车、四轮车等),都会发出提示和警告信息
盲区范围:
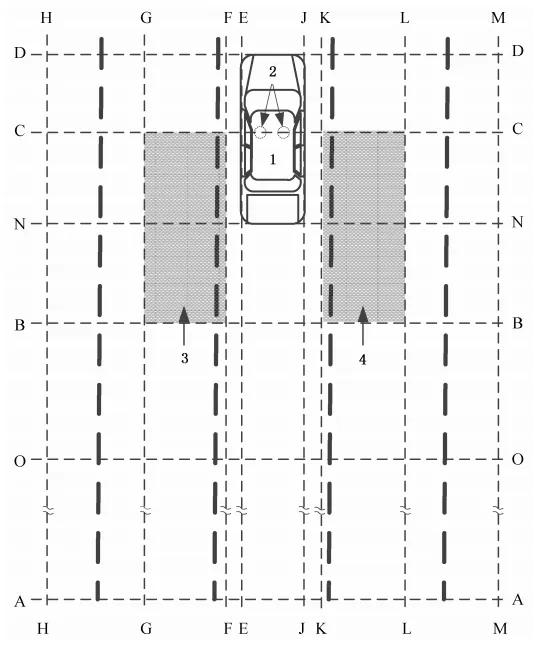
如上图,阴影区域内属于盲区范围,这个阴影法规上要求的范围如下:
线B平行于试验车辆后缘,并位于试验车辆后缘后部3.0m处
线C平行于试验车辆前缘,并位于第九十五百分位眼椭圆的中心
线K平行于试验车辆的中心线,并位于试验车辆车身右侧的最外缘的右边,与右侧最外缘相距0.5m
线L平行于试验车辆的中心线,并位于试验车辆车身右侧的最外缘的右边,与右侧最外缘相距3.0m
注:但是各家也会自定义监测范围
功能逻辑:
在汽车后方(一般为保险杠内)按照两个角雷达,探测后方车辆与自车之间的距离、速度、航向角等信息
判断后方车辆是否处于盲区范围内,进而触发告警信息
注:当出现自车超车场景时,被超越车辆进入盲区监测范围,需要对盲区警告进行抑制,一般要求两车之间相对速度差值≥15km/h。
固定物体监测到之后不应该报警
人机交互:
告警信息:一般是在后视镜上黄色灯光进行闪烁并且发出报警音
开启/关闭:系统应该在主机上设置开启关闭的按钮
系统故障:仪表界面上在系统出现故障时,应该出现故障标识

点击下方二维码,关注车辆工程分享



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
