针对露天矿山尘霾遮挡、夜间无光、非结构化道路、极端温差等核心痛点,红外热成像凭借长波红外的尘雾穿透能力、热辐射成像不受光照影响的特性,成为自动驾驶矿卡全天候感知的核心兜底技术。本文介绍的是适配矿山场景的红外感知算法体系,以及可落地的工程化应用方案。

一、适配矿山场景的红外感知算法体系
矿山场景对算法的核心要求是高鲁棒性、低延迟、强抗干扰、轻量化,需同时解决尘霾导致的图像退化、夜间低对比度、目标尺度差异大(矿卡/落石)、车载算力受限等问题,算法体系分为四大类:
(一)红外图像预处理与增强算法
该类算法是后续感知任务的前提,核心解决矿山红外图像低对比度、噪声大、尘霾模糊、非均匀性畸变四大问题,提升图像质量。
1. 尘霾穿透与去噪算法
• 传统算法:自适应中值滤波+双边滤波联合去噪、基于暗通道先验的红外去雾算法、多尺度Retinex增强算法,针对扬尘导致的图像边缘模糊、对比度下降问题,快速恢复目标轮廓和细节,适配车载实时性要求。
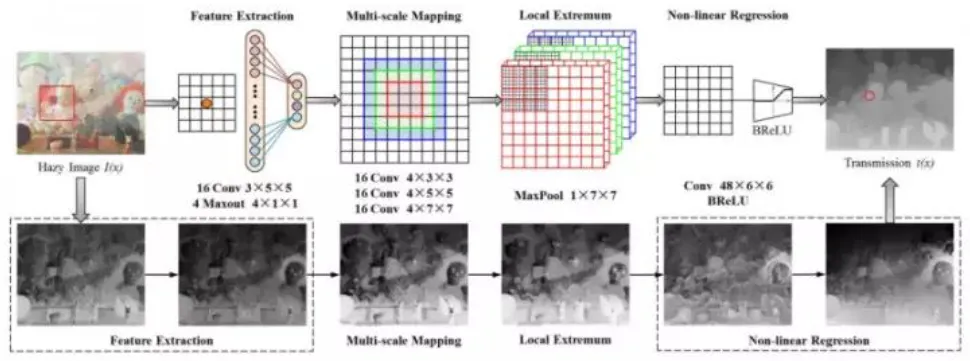
• 深度学习算法:改进型FFA-Net、DehazeNet红外专属去雾网络,针对矿山高浓度粉尘场景优化,在保留目标热辐射特征的同时,去除尘霾导致的图像退化,相比传统算法,边缘细节恢复率提升30%以上。
2. 低照度/宽温图像增强算法
• 轻量化亮度增强网络:基于Zero-DCE改进的LMIENet等轻量模型,针对夜间红外图像低照度、低动态范围问题,实现端到端的亮度自适应增强,同时抑制噪声,无需配对数据集,可在车载端实时推理。
• 非均匀性校正(NUC)算法:解决红外相机在矿山-40℃~80℃宽温工作下的固定模式噪声,实现单点校正和场景自适应校正,保障极端温差下的图像稳定性。
3. 时空配准与校正算法
实现双光谱(可见光+红外)图像的像素级配准、车载震动导致的图像抖动校正,以及多传感器的时间/空间坐标对齐,为后续多模态融合奠定基础,配准精度控制在1个像素内,时间同步误差≤1ms。
(二)核心红外感知算法
针对矿卡自动驾驶的核心需求,算法聚焦于障碍物检测、可行驶区域识别、目标跟踪三大核心任务,均为适配矿山场景的优化版本。
1. 红外目标检测算法(最核心,落地最广)
核心解决矿山场景下人员、作业设备(挖掘机/装载机/矿卡)、落石、坑洼等多尺度目标的精准识别,兼顾精度与实时性,主流方案分为两类:
• 轻量化一阶段检测算法(车载端主流):以改进型YOLO系列为核心,是矿山落地的绝对主流。
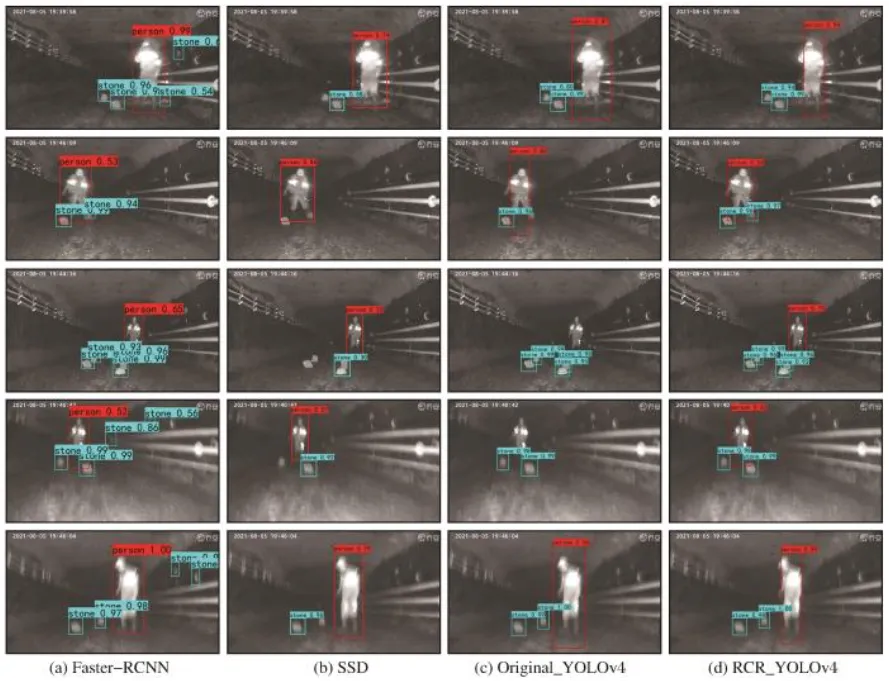
典型方案:RCR-YOLOv4、矿山专属优化YOLOv5/YOLOv8/YOLOv9。
核心优化点:通过K-Means++优化矿山目标的先验框尺寸,适配矿卡(大目标)与落石(小目标)的极端尺度差异;引入CA/CBAM注意力机制,强化低对比度、小目标的特征提取能力;通过深度可分离卷积轻量化模型,降低算力消耗,实现单路视频60FPS以上的推理速度,尘霾场景下目标检测mAP可达93%以上。
• 小目标专项检测算法:基于Transformer的双解码器红外小目标检测网络,针对矿山远距离(50m外)落石、人员等像素占比<0.15%的目标,优化特征融合机制,显著降低漏检率,适配长距离行驶的提前预警需求。
• 两阶段检测算法:改进型Faster R-CNN、Cascade R-CNN,检测精度更高,但推理速度较慢,多用于云端数据复盘、固定点位监测,车载端仅用于高精度辅助检测。
2. 语义分割与可行驶区域识别算法
解决露天矿非结构化道路、边界模糊、无车道线的痛点,实现像素级的环境语义理解。
• 轻量化分割网络:改进型BiSeNet、U-Net、DeepLabv3+,针对红外图像优化,实现可行驶区域/非道路区域/边坡/障碍物的实时分割,夜间和尘霾场景下,可通过地面与边坡的温度差异,精准识别道路边界,分割精度>90%,推理延迟<30ms。
• 专项边界检测算法:结合红外图像温度梯度特征,提取道路与排土场边界、车挡、边坡边缘,为矿卡卸料、转弯、会车提供安全边界约束,避免驶出安全作业区域。
3. 多目标跟踪算法
针对矿山动态目标(作业车辆、人员),实现持续稳定跟踪,解决扬尘遮挡导致的目标丢失、ID切换问题。主流方案为改进型ByteTrack、DeepSORT算法,结合红外热辐射特征,优化遮挡场景下的跟踪逻辑,实现多目标的连续跟踪,跟踪ID切换率降低80%以上,保障跟车、会车、装卸作业场景的决策稳定性。
(三)多模态融合感知算法
单一红外传感器存在测距精度不足、纹理特征缺失的局限,矿山场景必须通过多模态融合,实现优势互补,这是工程化落地的核心。
1. 双光谱图像融合算法
可见光+红外的像素级/特征级融合,采用自适应权重分配机制:Ffusion=α·Fvis+(1-α)·Fir,通过环境质量评估模块动态调整权重,正常光照下以可见光为主,夜间、尘霾、逆光场景下自动提升红外权重,实现全天候的图像质量最优,粉尘场景下误检率可降低37%。
2. 跨模态特征融合算法
红外图像的语义/轮廓特征,与激光雷达、4D毫米波雷达的距离/速度/点云特征融合,通过跨模态特征融合网络,实现“类别+空间位置+运动状态”的联合感知,既解决雷达目标分类能力弱的问题,又弥补红外测距精度不足的短板,显著降低误检和漏检率。
3. 决策级融合冗余机制
对红外、可见光、雷达的感知结果做联合决策,构建多重冗余备份,单一传感器失效时,其他传感器可实现核心场景的全覆盖,满足矿山自动驾驶的功能安全要求,比如激光雷达受扬尘干扰失效时,红外+毫米波雷达可完全兜底障碍物检测功能。
(四)矿山专项场景算法
1. 温度异常检测算法
基于红外热成像的测温能力,实现矿卡轮胎、电机、制动系统的过热监测,以及矿区明火、高温火情的识别,测温精度可达±0.5℃,通过温度阈值预警和温升趋势分析,提前识别设备故障和火灾隐患,避免爆胎、起火等安全事故。
2. 边坡与地质隐患识别算法
利用红外图像的温度场差异,识别边坡岩体的裂缝、滑移隐患(岩体变形会导致热辐射特征异常),配合边坡雷达数据,实现滑坡、坍塌等地质灾害的提前预警。
二、露天矿自动驾驶矿卡红外感知具体应用方案
(一)硬件选型与车载部署方案
1. 红外相机核心选型标准(适配矿山极端工况)
核心参数 | 选型要求 | 选型逻辑 |
光谱波段 | 8~14μm长波红外 | 尘霾、雾气穿透能力最强,适配矿山高扬尘场景 |
探测器规格 | 非制冷红外焦平面 | 保证低对比度、小温差目标的检出能力,夜间/尘霾下不丢失弱特征 |
环境适应性 | IP67/IP69K防护等级,工作温度-40℃~85℃,抗强震动冲击 | 适配矿山颠簸、粉尘、雨水、极端温差的恶劣工况 |
光学镜头 | 前向:长焦+广角组合;环视:广角镜头 | 兼顾远距离探测和近距离盲区覆盖,适配矿卡作业需求 |
2. 车载部署方案
• 前向主感知:1~2台红外相机,安装于矿卡车头前部,覆盖正前方100m内的行驶道路,负责远距离障碍物、车辆、人员、道路边界检测,是行驶过程中的主感知传感器。
• 360°环视感知:4~6台广角红外相机,均匀布设于车身四周,实现车身全向无死角覆盖,解决装卸料、转弯、倒车场景的视觉盲区,识别近距离人员、设备、障碍物,保障协同作业安全。
• 专项测温监测:2~4台小型红外测温相机,分别部署于轮胎、电机舱、制动系统位置,实时监测设备温度异常,实现故障预警。
• 配套算力平台:车载边缘计算单元,选用宽温、抗震、防尘的车规级/矿用级产品,AI算力≥100TOPS,满足多路红外视频的实时推理和多模态融合计算需求。
(二)系统整体架构
红外感知系统并非独立运行,而是深度融入矿卡自动驾驶全链路,整体分为4层架构:
• 数据采集层:完成红外相机、可见光相机、激光雷达、毫米波雷达、组合惯导的数据采集,通过PTP硬件同步实现时间戳统一,完成空间外参标定,将所有数据统一到车身坐标系,解决时空错位问题。
• 预处理层:执行红外图像去噪、去雾、增强、校正算法,输出高质量图像,同时完成多传感器数据的时空对齐,为后续感知任务提供标准化输入。
• 智能感知层:运行红外目标检测、语义分割、目标跟踪算法,以及多模态融合算法,输出标准化的环境语义信息:目标类别、3D位置、运动速度、可行驶区域、道路边界、风险隐患等。
• 决策输出层:将感知结果输入自动驾驶规划、决策、控制模块,实现路径规划、自动避障、速度调节、精准停靠等动作;同时将异常预警信息(设备过热、火情、边坡隐患)通过5G/5G-A网络上报至云端调度平台,实现闭环管理。
(三)核心作业场景落地应用
场景1:夜间无光全时段运输作业
• 核心痛点:露天矿夜间无道路照明,可见光相机完全失效,传统方案依赖人工照明,能耗高、照射范围有限,存在安全盲区。
• 落地方案:红外相机作为主感知传感器,无需依赖环境光照,通过热辐射特征实现全天候成像。配合优化的目标检测和分割算法,精准识别100m内的车辆、人员、落石、坑洼,以及道路边界,保障矿卡在完全无光环境下,实现正常行驶、跟车、会车全流程无人作业,实现“白班+夜班”24小时连续生产,大幅提升运输效率。
场景2:高浓度尘霾/扬尘恶劣工况作业
• 核心痛点:矿卡装卸料、编队行驶过程中产生浓密扬尘,能见度可低至30~50m,可见光图像严重模糊,激光雷达点云受粉尘干扰,噪声大幅增加,误检、漏检率飙升。
• 落地方案:利用长波红外的粉尘穿透能力,先通过红外去雾增强算法恢复图像细节,再启动多模态融合的动态权重机制,大幅降低可见光、激光雷达的特征权重,以红外+4D毫米波雷达为核心感知源,稳定识别40m外的障碍物,实现自动绕行和安全行驶,避免因能见度低导致的碰撞、刮碰事故,保障恶劣天气下的作业连续性。
场景3:装卸料协同作业场景
• 核心痛点:矿卡与挖掘机、装载机的协同作业,需要精准停靠,车身盲区大,易出现设备刮碰、人员闯入风险,尘霾下视觉感知失效会加剧安全隐患。
• 落地方案:通过车身环视红外相机,实现360°盲区全覆盖,实时识别挖掘机、铲斗、作业人员的位置和动态,配合毫米波雷达的精准测距,为控制模块提供厘米级的位置信息,实现矿卡的精准停靠;同时通过人员检测算法,实时预警违规闯入作业区的人员,保障装卸作业的安全与效率。
场景4:排土场卸料作业场景
• 核心痛点:排土场道路边界模糊,无明确车道线,夜间、尘霾下无法识别排土边界、车挡,存在坠崖、边坡坍塌的高风险。
• 落地方案:通过红外相机捕捉地面、车挡、边坡的温度差异,利用语义分割算法精准识别可行驶区域、排土安全边界、车挡位置,引导矿卡精准停靠卸料;同时通过红外温度场监测,识别边坡岩体的异常特征,提前预警坍塌、滑移隐患,杜绝卸料环节的重大安全事故。
场景5:设备健康与矿区安全预警
• 核心痛点:矿卡重载作业下,轮胎、电机、制动系统易出现过热,引发爆胎、起火事故;露天矿范围广,易出现火情、违规作业等安全隐患,人工巡检效率低、覆盖不全。
• 落地方案:通过专项红外测温相机,实时监测矿卡核心部件的温度,通过温升算法识别异常过热,提前触发分级预警,通知维保人员处置,避免设备故障停机;同时利用车载红外相机,实现行驶过程中的矿区火情、违规人员作业的全域监测,配合云端调度平台,实现矿区安全的全时段管控。
(四)工程化落地关键优化要点
• 专属数据集建设:采集露天矿山不同工况(夜间、不同扬尘浓度、极端温差、各类作业场景)的红外图像数据,构建矿山专属红外数据集,完成人员、车辆、障碍物、道路、边坡等目标的精细化标注,用于算法的训练、微调与迭代,大幅提升场景适配性,避免通用模型的“水土不服”。
• 算法轻量化优化:针对车载边缘算力受限的问题,对算法模型进行剪枝、量化、知识蒸馏,在保证检测精度的前提下,降低模型参数量和计算量,将单路红外视频的推理延迟控制在50ms以内,满足自动驾驶的实时性要求。
• 极端环境适应性优化:针对矿山宽温、强震动、高粉尘的特点,完成红外相机的宽温标定和抗震动安装设计;算法训练中加入不同温度、不同震动模糊的样本,提升模型在极端环境下的稳定性。
• 安全冗余设计:构建“红外+可见光+激光雷达+毫米波雷达”的四重冗余感知体系,红外作为极端环境下的兜底感知方案,与其他传感器形成功能互补,任何单一传感器失效,都不会导致系统感知能力丧失,满足矿山安全生产的严苛要求。
• 数据闭环与云端迭代:通过矿山5G/5G-A专网,将车载端的红外数据、算法运行结果、误检漏检样本回传至云端,实现数据闭环,持续优化算法模型,支持远程OTA升级,适配矿山作业场景的动态变化。