🐉 龙哥读论文知识星球来了!自动驾驶领域风云变幻,如何快速抓住不确定性建模、在线地图生成等核心突破?星球每日无上限更新AI领域论文、资讯、招聘、开源代码,一站式干货,每日2分钟刷完即赚!👇扫码加入「龙哥读论文」知识星球,前沿干货、实用资源一站式拿捏~

龙哥推荐理由:
自动驾驶的“眼睛”(感知模块)如果过于自信,可能会把“模糊的远方”当成“清晰的车道”,导致规划出错。这篇论文戳中了当前在线地图生成的一个痛点:只给“答案”,不给“信心”。它提出的结构化不确定性建模方法,不仅让地图生成更准,更重要的是把“我不确定”这个信息有效地传递给了下游的轨迹预测模块,让整个系统变得更稳健、更接近使用完美地图的水平。对于追求安全可靠的自动驾驶系统来说,这种思路非常值得关注。
原论文信息如下:
论文标题:
Uncertainty Matters: Structured Probabilistic Online Mapping for Motion Prediction in Autonomous Driving
发表日期:
2026年03月
发表单位:
未明确标注(作者来自多个机构)
原文链接:
https://arxiv.org/pdf/2603.20076v1.pdf
开源代码链接:
论文中提及“Code is published under link-available-soon”,暂未提供。
想象一下,自动驾驶汽车正在路上行驶。它的“眼睛”(感知模块)看到远处有个模糊的车道线轮廓。一个过于自信的地图生成模型可能会斩钉截铁地告诉你:“就是这里,拐弯!” 而一个更聪明的模型则会说:“嗯,这里看起来像条车道,但我不太确定,尤其是远处那个点,误差可能比较大。” 你会更信任哪一个?
传统的在线地图生成(Online Map Generation, OMG)模型,比如大家熟悉的MapTR系列,都是“自信型选手”。它们会把车道线、路缘石等地图元素精准地回归出来,但从不告诉你它对哪个部分的预测更有把握。这就像考试只给分数,不标出哪些题是蒙的一样。对于后续的轨迹预测和规划模块来说,这很危险——它们会平等地对待所有预测,包括那些可能错得很离谱的部分。
近年来的研究开始让地图生成模型“谦虚”一点,给预测加上不确定性估计。但现有的方法大多有一个很“天真”的假设:认为一条车道线上每个点的预测误差是互相独立的。这合理吗?当然不!如果因为传感器标定偏差导致车道线起点预测偏左了5厘米,那整条线很可能都整体偏左,而不是起点偏左、中间偏右、终点又偏上这种“精神分裂”式的错误。忽略点与点之间的空间相关性,会得到“锯齿状”、不符合几何常识的不确定性,对下游任务帮助有限,甚至可能误导。抛弃“独立”假设:让地图学会表达“不确定”
这篇名为《Uncertainty Matters》的论文,正是要解决上述问题。它提出了一个结构化概率在线地图生成框架。核心思想很简单:既然车道线点的误差是相关的,那我们就应该建模这种相关性!
具体来说,它将每个地图元素(比如一条由N个点组成的车道线)的预测,从一个确定的坐标序列,转变为一个多元高斯分布。这个分布由均值向量 μ(预测的“最佳猜测”位置)和一个协方差矩阵 Σ共同描述。
 这个协方差矩阵 Σ 是关键。它的对角线元素表示每个点自身坐标(x,y)的方差(不确定性大小),而非对角线元素则表示了不同点坐标之间的协方差,即相关性。
论文用一张图非常直观地展示了“独立假设”(对角协方差)与“相关建模”(全协方差)的区别:
图1:不同不确定性表示的图示。(左)独立假设下,点与点之间没有相关性,导致协方差估计不一致(例如,无法建模通常远处点不确定性更高的规律)。(右)建模了相关性的表示,能更准确地反映底层的不确定性结构。
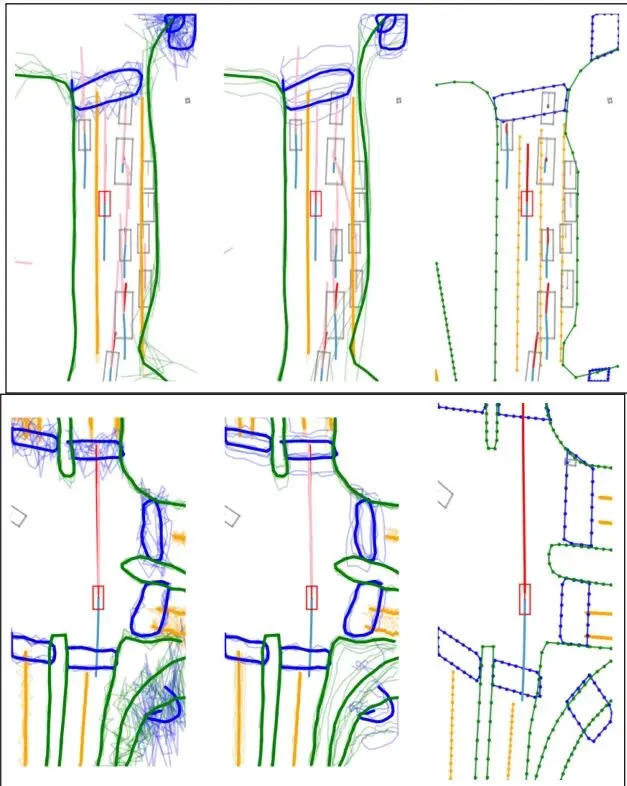
定性对比就更明显了。如果从预测的分布中采样(想象成让模型画出多条可能的车道线):
图2:在nuScenes多个场景下的OMG预测定性比较。细的透明线是从预测分布中抽取的样本,粗实线是预测均值。(左)使用对角协方差(独立不确定性)的基线模型无法捕捉点之间的依赖关系,导致采样结果锯齿状、空间上不连贯。(中)我们提出的LRPD模型显式地考虑了空间相关性,产生平滑且几何一致的样本。(右)用于参考的真值高清地图。
看到区别了吗?左边基于独立假设的采样,得到的车道线扭来扭去,像心电图,这显然不符合真实世界中车道线平滑的物理规律。而中间本文方法得到的采样,则是一条条平滑、合理的曲线,更真实地反映了“整条线一起不确定”的模糊性。右边的真值地图表明,我们的方法(中间)的均值预测也更准。
这个协方差矩阵 Σ 是关键。它的对角线元素表示每个点自身坐标(x,y)的方差(不确定性大小),而非对角线元素则表示了不同点坐标之间的协方差,即相关性。
论文用一张图非常直观地展示了“独立假设”(对角协方差)与“相关建模”(全协方差)的区别:
图1:不同不确定性表示的图示。(左)独立假设下,点与点之间没有相关性,导致协方差估计不一致(例如,无法建模通常远处点不确定性更高的规律)。(右)建模了相关性的表示,能更准确地反映底层的不确定性结构。
定性对比就更明显了。如果从预测的分布中采样(想象成让模型画出多条可能的车道线):
图2:在nuScenes多个场景下的OMG预测定性比较。细的透明线是从预测分布中抽取的样本,粗实线是预测均值。(左)使用对角协方差(独立不确定性)的基线模型无法捕捉点之间的依赖关系,导致采样结果锯齿状、空间上不连贯。(中)我们提出的LRPD模型显式地考虑了空间相关性,产生平滑且几何一致的样本。(右)用于参考的真值高清地图。
看到区别了吗?左边基于独立假设的采样,得到的车道线扭来扭去,像心电图,这显然不符合真实世界中车道线平滑的物理规律。而中间本文方法得到的采样,则是一条条平滑、合理的曲线,更真实地反映了“整条线一起不确定”的模糊性。右边的真值地图表明,我们的方法(中间)的均值预测也更准。
低秩加对角:高效捕捉道路几何的相关性
想法很美好,但实现有挑战。一个地图元素有N个点,每个点有x, y两个坐标,那么协方差矩阵 Σ 的大小就是 2N x 2N。直接预测这个矩阵的所有元素(O(N²) 参数)计算量巨大,而且训练极其不稳定,容易预测出不合法的(非正定)矩阵。
本文的巧妙之处在于提出了一个 低秩加对角(Low-Rank Plus Diagonal, LRPD) 协方差分解。它将复杂的全协方差矩阵拆解成两个简单部分的组合:
• 对角部分 D:这是一个对角矩阵,只包含每个坐标独立的方差。这很容易预测,负责捕获局部的、点特有的噪声。
• 低秩部分 L·LT:L 是一个 2N x R 的矩阵,其中 R 是一个远小于 2N 的数(称为秩,论文中取24)。L·LT 的结果是一个低秩矩阵,它能高效地捕获点与点之间全局的、结构化的相关性,比如整条线的平移、旋转或弯曲的不确定性。
κ 是一个标量,用于在训练中控制低秩部分的权重。这种分解将参数数量从 O(N²) 降到了 O(NR),例如当 N=50(100个坐标),R=24时,参数减少了约4倍,既高效又稳定。
训练时,模型通过最大化观测到真值地图坐标的对数似然来学习,损失函数是负对数似然(Negative Log-Likelihood, NLL):
 为了训练稳定,论文还采用了课程学习策略:先让 κ=0,只学习简单的对角部分 D;等模型“入门”后,再逐渐增大 κ,引入低秩部分 L,让模型学习更复杂的空间相关性。
为了训练稳定,论文还采用了课程学习策略:先让 κ=0,只学习简单的对角部分 D;等模型“入门”后,再逐渐增大 κ,引入低秩部分 L,让模型学习更复杂的空间相关性。
从地图到轨迹:不确定性如何赋能预测?
生成带有结构化不确定性的地图只是第一步。更重要的是,如何让下游的轨迹预测模块利用这些信息,做出更鲁棒的决策。论文设计了两种精妙的机制:
传统轨迹预测编码器只接收地图点的坐标 (x, y)。现在,我们为每个点构造一个丰富的特征向量,包含:
1. 预测的均值坐标 (μx, μy) —— “最佳猜测在哪”。
2. 从对角矩阵 D 中提取的独立方差 (σ2xx, σ2yy) —— “这个点自己有多不确定”。
3. 从低秩矩阵 L 中提取的对应行向量 (lx, ly) —— “这个点和其他点的关联方式”。
这样一来,编码器不仅知道点的位置,还知道这个位置的可信度,以及它所属的几何结构的整体模糊程度。
除了几何不确定性,地图元素还有分类不确定性(这到底是不是一条车道线?)。论文利用分类置信度分数,通过 特征线性调制(Feature-wise Linear Modulation, FiLM) 机制,动态调整编码后的特征。FiLM 会对特征进行一个仿射变换(缩放γ和偏移β),变换的参数由置信度分数决定:
 这相当于告诉轨迹预测器:“对于这条我非常确定是车道线的信息,请重点参考;而对于那条我有点吃不准是不是路缘石的信息,使用时请谨慎一点。”
通过这两招,预测模块就能综合权衡地图的几何信息和置信信息,从而在感知模糊时做出更保守、更安全的预测。
这相当于告诉轨迹预测器:“对于这条我非常确定是车道线的信息,请重点参考;而对于那条我有点吃不准是不是路缘石的信息,使用时请谨慎一点。”
通过这两招,预测模块就能综合权衡地图的几何信息和置信信息,从而在感知模糊时做出更保守、更安全的预测。
实验验证:精度提升与接近真值的表现
论文在权威的 nuScenes 数据集上进行了全面验证,使用了多种地图生成骨干网络(MapTR, MapTRv2, MapTRv2-CL)和 HiVT 作为轨迹预测器。
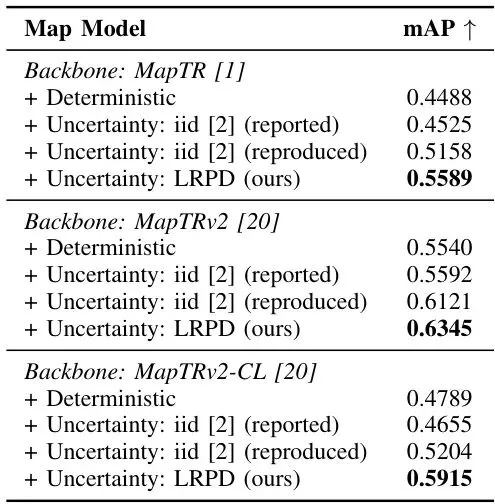
表 I:不同骨干网络类型和不确定性估计方法的在线地图生成性能。
可以看到,在三个不同的骨干网络上,采用LRPD不确定性建模的方法(最后一行)都取得了最高的 mAP,全面超越了确定性基线以及独立不确定性(iid)基线。这说明建模空间相关性不仅能让不确定性更合理,甚至能反哺几何均值的预测,让它变得更准!
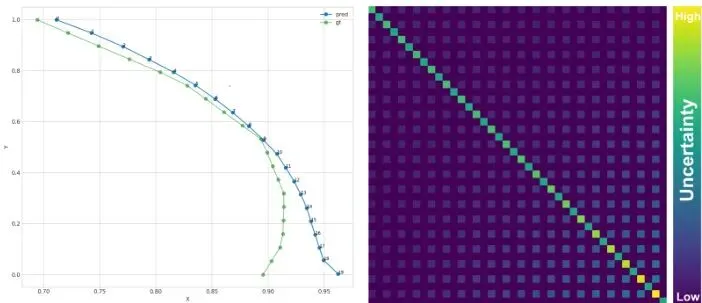
下图展示了一个具体的校准案例:模型预测的误差越大,它给出的不确定性(协方差椭圆)也越大,说明模型对自己的错误有“自知之明”。
图3:本方法的不确定性校准。(左)预测与真值地图元素的可视化。预测开始时与真值紧密对齐,但位置误差在末端逐渐增加。(右)预测的协方差表明模型的不确定性与误差相关。随着预测的偏离,不确定性相应增长。具体来说,模型正确地输出了y坐标(误差保持较小)的低不确定性,并适当地为误差增大的x坐标分配了高不确定性。
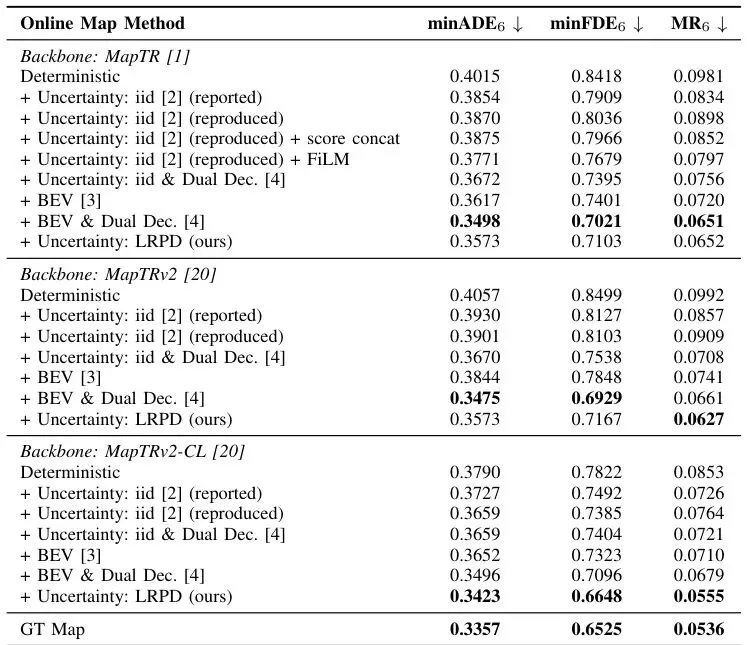
接下来是重头戏:基于这些不确定性地图的轨迹预测性能。评价指标包括 minADE₆、minFDE₆(越小越好)和 Miss Rate (MR₆,越小越好)。
表 II:不同骨干网络类型和不确定性估计方法的轨迹预测性能。
结果非常鼓舞人心!在所有骨干网络上,本文的LRPD方法都取得了最佳或接近最佳的性能。特别值得注意的是表格最后一行“GT Map”,这是使用完美真值地图作为输入时轨迹预测能达到的理论下限。而我们最好的模型(MapTRv2-CL + LRPD)的性能,已经非常接近这个“开挂”的下限了(例如minADE₆仅差1.9%)!
这意味着什么?意味着通过引入高质量的结构化不确定性建模,在线生成的地图对于下游预测任务的价值,已经几乎可以媲美需要高昂制作和维护成本的、完美的预制高清地图(HD Map)。这是迈向摆脱对HD Map强依赖、实现真正高鲁棒性自动驾驶的关键一步。未来展望:更全面的不确定性建模
本文的工作开了一个好头,但不确定性建模的征程远未结束。未来至少可以从以下几个方向深入:
跨元素相关性:目前只建模了一个地图元素(如一条车道线)内部点之间的相关性。现实中,不同元素之间也存在强相关,比如相邻车道线应该是平行的,一条车道线的弯曲会影响另一条。建模这种跨元素的全局相关性是下一步的挑战。
时间维度不确定性:对于动态障碍物,其轨迹预测的不确定性会随时间累积。如何将地图的静态不确定性与障碍物动态轨迹的时间不确定性在同一个概率框架下进行联合推理,是一个更复杂的课题。
端到端联合优化:本文采用了两阶段训练(先训地图,再固定地图训预测)。未来可以探索端到端的训练,让地图生成和轨迹预测两个任务在不确定性信号的引导下更好地协同优化。
龙迷三问
这篇论文解决的核心问题是什么?它解决了当前自动驾驶在线地图生成(OMG)中一个关键缺陷:大多数模型只输出确定性的几何预测,而忽略了预测本身的不确定性。更糟的是,即使有模型尝试输出不确定性,也通常假设一条车道线上各个点的预测误差是相互独立的,这不符合现实(整条线的误差通常是相关的)。本文提出了一种结构化概率模型,能高效且准确地捕获地图元素内部的几何相关性,生成更真实的不确定性估计,并证明这能显著提升下游轨迹预测的鲁棒性和精度。
LRPD 具体是什么意思?LRPD 是 Low-Rank Plus Diagonal(低秩加对角)的缩写。这是一种协方差矩阵的参数化/分解方式。它将一个复杂的、表示点间相关性的全协方差矩阵,分解为一个对角矩阵(捕获每个点独立的噪声)加上一个低秩矩阵(高效捕获点与点之间的结构化相关性,如整体平移、弯曲等)。这种分解在表达能力和计算效率/稳定性之间取得了绝佳的平衡。
FiLM 机制在这里起什么作用?FiLM (Feature-wise Linear Modulation) 是一种特征调制技术。在这篇论文的上下文里,它被用来将地图元素的分类置信度(这是不是一条车道线?)信息,融合到后续轨迹预测模块对地图几何特征的编码过程中。它不是简单地把置信度分数拼接到特征后面,而是用这个分数去动态地缩放和偏移每个特征维度。这样,模型就能根据“我对这条信息的类别有多确定”来灵活调整其对轨迹预测的影响权重,实现更精细的信息融合。
如果你还有哪些想要了解的,欢迎在评论区留言或者讨论~龙哥点评
论文创新性分数:★★★★☆
LRPD协方差分解的提出,针对性地解决了全协方差矩阵训练不稳定、对角矩阵忽略相关性的痛点,思路清晰有效,在不确定性建模的方向上做出了扎实的推进。实验合理度:★★★★☆
实验设计全面,在多个主流骨干网络上验证,并复现了对比方法的基线以保证公平。使用“GT Map”性能作为理论下限来对比,非常有说服力。两阶段训练策略是为了稳定性和公平比较,可以理解。学术研究价值:★★★★★
价值很高。它明确指出了当前概率地图生成中“独立假设”的局限性,并提供了一个高效、稳定的解决方案。其“不确定性赋能下游任务”的范式,对自动驾驶乃至其他需要感知-决策链条的机器人领域都有很强的启发意义。稳定性:★★★★☆
通过LRPD分解和课程学习策略,有效解决了直接预测全协方差的稳定性问题。从实验看,训练是稳定的,生成的不确定性也符合预期(校准性好)。适应性以及泛化能力:★★★★☆
方法本身是骨干网络无关的,论文也展示了在三种不同骨干上的有效性。其核心是改进不确定性表征,理论上能适应任何需要向量化地图输出的场景。在nuScenes这种复杂城市场景上的成功已验证了其泛化潜力。硬件需求及成本:★★★☆☆
相比确定性基线,需要预测额外的参数(D和L),并计算NLL损失,会带来一定的计算开销。LRPD分解已大幅降低了全协方差的成本,但实时性仍需在实际芯片上进一步验证。训练需要课程学习,可能稍显繁琐。复现难度:★★★☆☆
论文方法描述清晰,但依赖于对现有MapTR等代码库的修改。论文提到代码将发布(link-available-soon),如果开源完整,复现难度会降低。两阶段训练和课程学习的超参数需要仔细调整。产品化成熟度:★★★☆☆
在实验环境中已证明其巨大价值,尤其对提升系统在感知模糊情况下的鲁棒性至关重要。但要产品化,仍需与具体的规划控制器深度集成,验证其在海量corner case下的表现,并持续优化其计算效率以满足车规级芯片的实时性要求。可能的问题:
目前的不确定性建模仍局限于“元素内”,未来需扩展到“元素间”的相关性。实验部分与一些结合了扩散模型等更强解码器的SOTA预测方法对比不足,未能完全凸显LRPD在顶级基线上的绝对优势。端到端优化可能是下一个性能增长点。[1] B. Yang, et al. “MapTR: Structured Modeling and Learning for Online Vectorized HD Map Construction.” ICLR 2023.[2] J. Gu, et al. “Predictive Uncertainty Estimation for Autonomous Driving Perception.” CoRL 2023.[4] H. Zhang, et al. “Probabilistic Map Learning for Motion Prediction Under Perception Uncertainty.” ICRA 2024.[20] B. Yang, et al. “MapTRv2: An End-to-End Framework for Fast Online Vectorized HD Map Construction.” arXiv 2024.[35] Z. Zhou, et al. “HiVT: Hierarchical Vector Transformer for Multi-Agent Motion Prediction.” CVPR 2022.原始论文:Pritom Gogoi, et al. “Uncertainty Matters: Structured Probabilistic Online Mapping for Motion Prediction in Autonomous Driving.” arXiv:2603.20076v1, 2026.*本文仅代表个人理解及观点,不构成任何论文审核或者项目落地推荐意见,具体以相关组织评审结果为准。欢迎就论文内容交流探讨,理性发言哦~ 想了解更多原文细节的小伙伴,可以点击左下角的"阅读原文",查看更多原论文细节哦!

🚗 自动驾驶的“眼睛”不再盲目自信!想和更多同行探讨如何让AI感知更“自知之明”?
欢迎加入龙哥读论文粉丝群,
扫描下方二维码或者添加龙哥助手微信号加群:kangjinlonghelper。
一定要备注:研究方向+地点+学校/公司+昵称(如 自动驾驶+北京+驭龙机甲),根据格式备注,可更快被通过且邀请进群。