自动驾驶为何需要精准的“时间感”
- 2026-05-07 23:20:23
2025年,某汽车品牌先后执行两次召回。两次召回事件,都共同指向了智能驾驶系统中的一个关键角色: 授时同步算法。其中9月份召回涉及的一个问题是"授时同步异常"——当车辆时区切换或卫星导航信号中断时,系统时间戳容易发生毫秒级偏差,可能导致智能泊车辅助功能对静态障碍物的识别延迟,从而增加剐蹭或碰撞的风险。
“时间同步”
对于自动驾驶汽车而言,让所有传感器在时间维度上保持统一,是确保系统可靠运行的基础条件之一。
*
为什么“时间同步”如此重要
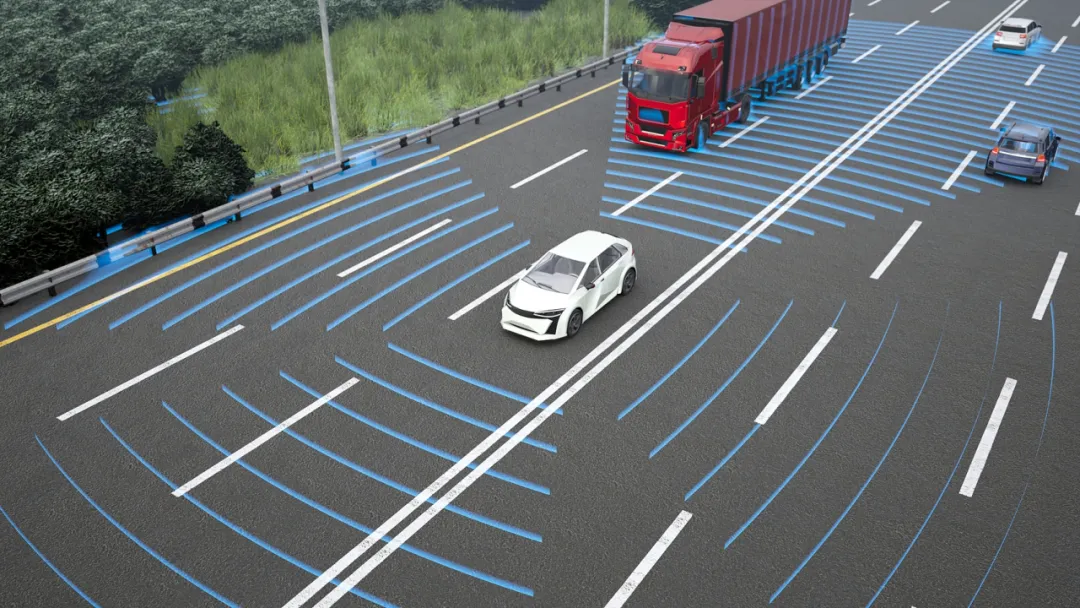
一辆典型的自动驾驶汽车搭载了多种传感器:摄像头、激光雷达、毫米波雷达、惯性测量单元等。这些传感器各自依赖独立的晶振产生计时信号。由于物理特性和环境温度的影响,不同晶振的运行速率存在细微差异,这也被称为“钟漂”。
如果不加干预,车辆运行数小时后,这种细微差异会逐步累积,原本应同步采集的数据可能产生数毫秒甚至几十毫秒的时间偏移。在120公里时速下,10毫秒意味着车辆已移动了约33厘米。也就是说,当摄像头记录的是当前时刻的画面时,激光雷达反馈的可能是几十毫秒前的障碍物位置——两个本应属于同一时刻的数据,实际描述的却是两个略有时间差的场景。
在自动驾驶系统中,使用较多的传感器是摄像头和激光雷达。摄像头拍照接近于“瞬间完成”。一旦快门打开关闭,那一帧图像的所有像素几乎在同一时间被捕获。激光雷达则不同,机械旋转式激光雷达通过持续旋转发射激光束来构建周围环境的3D点云,完成一次360度的扫描需要50到100毫秒。在一圈扫描中,有些点是在起始时采集的,有些则是在结束时采集的,因此一个完整的点云帧内部本身就存在时间差。

*
“时间同步”方式
01 硬件层面:建立统一的时钟基准
最基础的方式是让所有传感器共享同一个时钟源,通常借助全球卫星导航系统(GNSS)接收机提供的1PPS(每秒脉冲)信号作为高精度参考,再结合IEEE 1588精密时间协议在网络设备间实现微秒级的时间对齐,从而让激光雷达、摄像头、惯性测量单元等传感器的时间戳都挂载在同一条时间线上。
另一种更为直接的方法是硬件触发,即通过一个传感器发出触发信号去控制另一个传感器采集,这种方式能实现较高的时间一致性,但布线复杂且只适用于固定触发场景。
02 软件层面:补偿残余的微小偏差
即便硬件同步已做到精准,但实际运行中仍会因网络抖动、钟漂等产生微小误差,需要通过软件进行补偿。常用方法是:
1)时间戳插值和对齐,即根据不同传感器的已知时间戳,利用线性插值或模型估算出某一时刻的数据,填补时间空档。
2)软件栈中的同步模块则按时间窗口匹配不同传感器消息,实现粗粒度的数据对齐。
3)对于更精细的场景,还可采用在线时间偏差补偿,通过卡尔曼滤波等算法实时估计并动态修正各传感器的时间漂移,虽然计算开销较大,但能自适应不同的时间漂移情况。
03 现实挑战:应对异构传感器与系统不确定性
实际落地时,时间同步还需解决传感器内部机制的差异——激光雷达的点云在扫描周期内各点时间不同,摄像头曝光是一瞬间,而惯性测量单元则以极高频率连续输出,因此同步系统不仅要对齐帧级时间戳,还需理解数据内部的时间结构。网络延迟和车载计算平台的负载波动,会导致同步协议在微观尺度上的不确定性,协议要处理这些不确定性,需要在底层实现大量时间补偿机制。
此外,不同传感器帧率不同(如摄像头30赫兹、激光雷达10赫兹),必须设计合理的匹配策略,保证时间线上的数据不丢失,也不会产生误匹配,才能最终为感知与决策提供可靠的时间对齐基础。
某汽车品牌的召回事件将“授时同步异常”这个技术细节带入公众视野。它说明,当汽车依赖多传感器融合来感知环境时,各传感器之间是否拥有统一的时间基准,直接影响系统的可靠性。
随着自动驾驶技术向更高阶发展,对时间同步能力的要求也在持续提升。未来,无论是更复杂的感知融合,还是车路云协同的规模化落地,精准的“时间感”都将成为智能汽车不可或缺的基础设施。
往期回顾
END
更多精彩内容,请继续关注我们。
声明:本文为公益科普内容,内容整合自网络,旨在科普时空精度对自动驾驶安全的重要性,不针对任何特定品牌或车型进行评价,仅供参考。如有侵权请联系删除。

公众号

视频号

抖音号
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 家用新能源SUV之选,哪款能点燃你的心?
- 20万级合资SUV智能比拼:探岳L 380TSI与途观L Pro智领版谁更值得入手?
- 奇瑞悄然上新SUV!车长超5米,619马力三电机加持,百公里油耗仅1.5升
- 8分钟卖一台!125万起豪华硬派SUV凭什么?
- 自动驾驶也要“打怪升级”,一根杆破解 “鬼探头” 难题!
- 大五座纯电 SUV 新选择!乐道 L80 基于 NT3.0 平台打造
- GM自动驾驶冲刺2028!200辆车开测"脱眼"技术,你敢放手吗?
- 2026国内4月上市5款合资SUV,哪个最有黑马潜力?
- 凯翼昆仑:10 万级高配 SUV!性价比之王,车长 4738mm,WLTC 油耗 8.2-8.4L/100km,硬核底盘家用代步省钱又耐用
- 10万预算闭眼入!三款国产SUV动力强、空间大,家用自驾超值首选
