一、核心模块消融分析
MeanFlow 替换基础解码器的收益
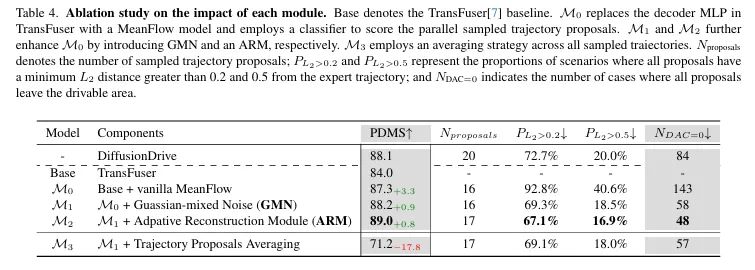
内容:表 4 显示,基线 TransFuser 的 PDMS 为 84.0,而将其解码器替换为 vanilla MeanFlow 后,M0 的 PDMS 提升到 87.3,说明一步式生成框架本身就能显著增强规划性能。不过,M0 在偏离专家轨迹和驶出可行驶区域的统计上仍然较差,这说明仅有 MeanFlow 还不足以稳定覆盖复杂场景中的多样轨迹。
二、进一步消融实验分析
Gaussian 组件数量并不是越多越好
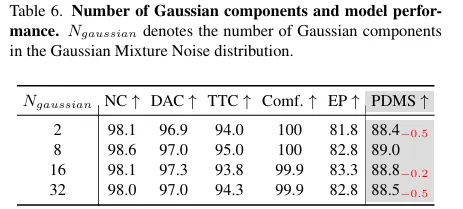
内容:表 6 对不同 Gaussian 组件数进行了对比,结果表明 8 个组件时模型整体表现最好。组件数过少时,模型难以充分建模轨迹分布;组件数继续增加后,性能没有继续提升,反而略有下降,这说明该方法需要的是合适的模态容量,而不是一味增加混合成分。
GMN 的生成方式具有较强灵活性
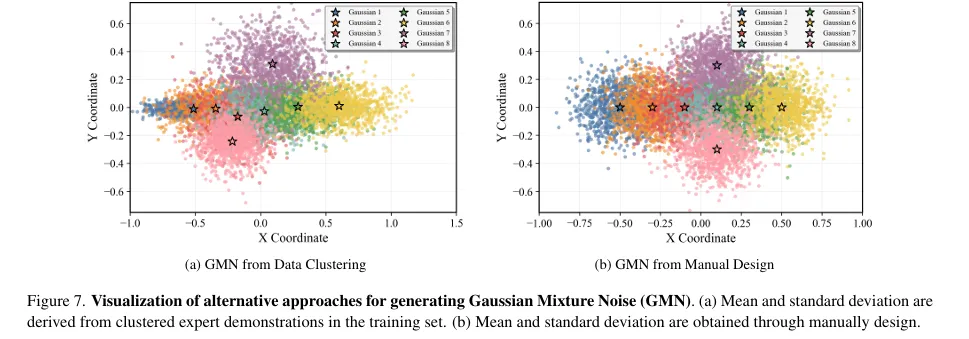
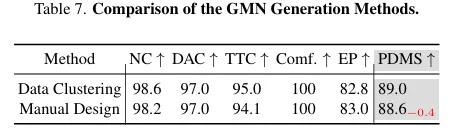
内容:表 7 比较了两种 GMN 构造方式,即基于专家轨迹聚类的数据驱动方法和人工设计方法。结果显示,人工设计方案只带来了很小的性能下降,这说明 MeanFuser 对特定数据集统计并不过度依赖,GMN 的核心价值在于提供连续且多模态的噪声先验,而不是严格依赖某一种固定构造方式。
GMN 同时增强性能与多样性
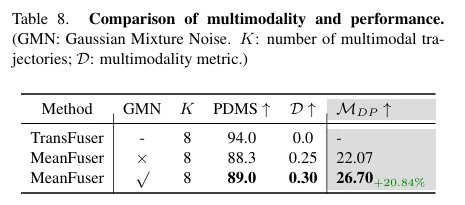
内容:表 8 显示,引入 GMN 后,模型不仅在 PDMS 上优于不使用 GMN 的版本,而且轨迹多样性指标也更高,最终综合指标 MDP 提升了 20.84%。这说明该方法不是以牺牲准确性来换取多样性,而是在规划质量和多模态表达之间取得了更好的平衡。
三、可视化分析
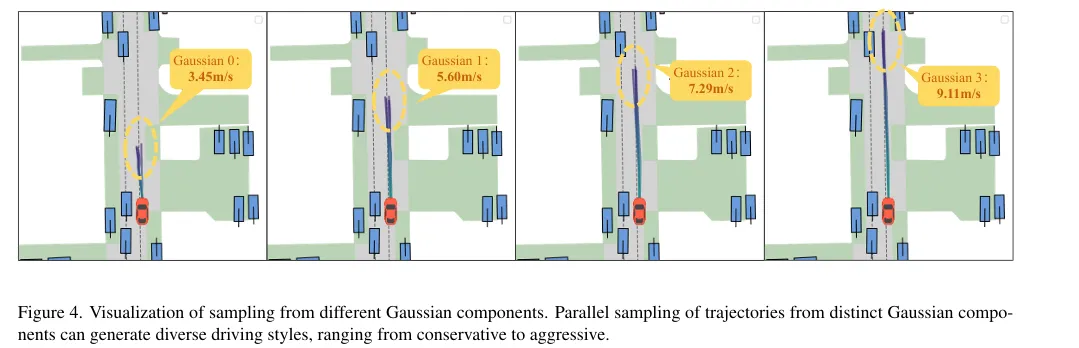
不同 Gaussian 组件对应不同驾驶风格
内容:图 4 展示了从不同 Gaussian 组件中采样得到的轨迹结果。随着组件均值增大,生成轨迹的速度从更保守逐渐过渡到更激进,说明 GMN 不只是提供多条候选轨迹,还在一定程度上将不同驾驶风格组织成了可区分的模态。
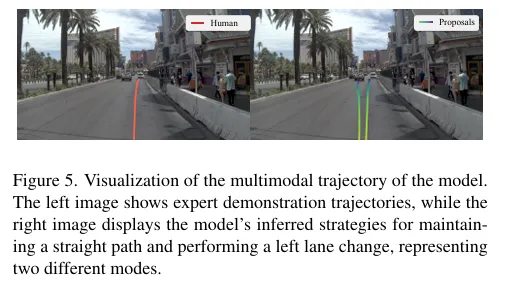
模型能够在同一场景下生成真实的多模态方案
内容:图 5 展示了同一驾驶场景中的两类可行策略,一类更贴近专家演示的直行方式,另一类则表现为左变道方案。这说明模型学到的不是单一路径回归,而是在同一环境下生成多种合理决策。
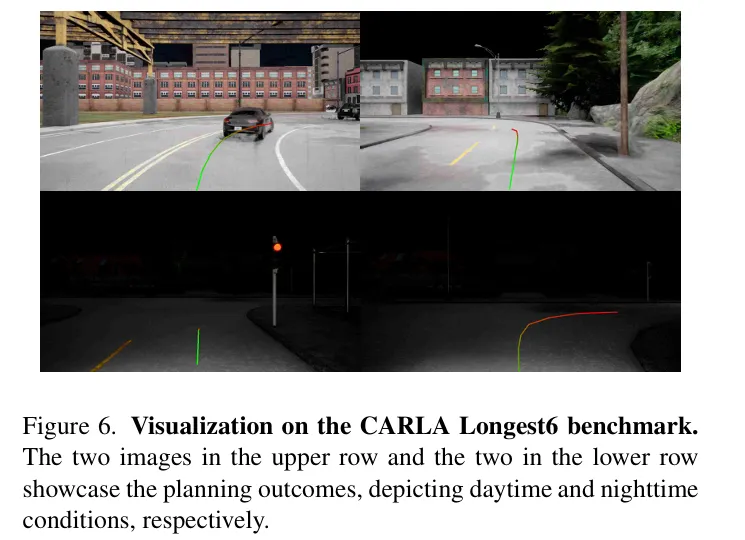
闭环规划结果在昼夜场景下都具有稳定性
内容:图 6 给出了 CARLA Longest6 基准上的闭环规划可视化,上下两排分别覆盖白天和夜晚场景。论文用这组结果说明,模型不仅在离线指标上有效,也能在不同光照条件和真实闭环执行中保持较稳定的规划表现。
两种 GMN 构造方式在分布形态上存在差异
内容:图 7 将数据聚类得到的 GMN 与人工设计的 GMN 做了直观对比。该图表明,两种方法虽然构造方式不同,但都能形成具有结构性的多峰分布,这也与表 7 中“性能差距较小”的结论相呼应。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
