<Weather-Conditioned Branch Routing for Robust LiDAR-Radar 3D Object Detection>论文:https://arxiv.org/pdf/2604.05405一、文章所属的研究方向
这篇论文属于自动驾驶鲁棒感知与多模态3D目标检测方向,具体聚焦在恶劣天气下的LiDAR-4D Radar融合检测。论文关注的核心问题是:在雨、雾、雪等环境中,不同传感器的可靠性会动态变化,传统“固定融合”方法通常只学习一个共享融合表示,难以根据天气变化自适应地调整对LiDAR或4D Radar的依赖,因此在复杂环境下鲁棒性和可解释性都受到限制。作者据此提出,应当把多模态感知从“特征融合”进一步提升为“条件驱动的表示选择”问题。
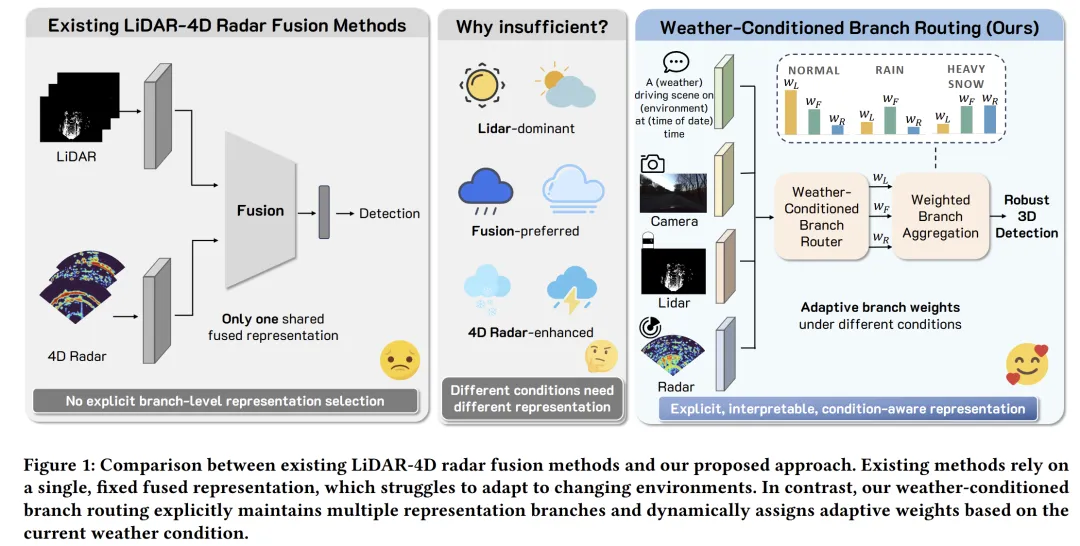
从图1可以直观看到,作者将已有LiDAR-4D Radar融合方法概括为“单一共享融合表示”,而其方法则显式维护多个分支,并根据天气条件动态调整分支权重,这也是本文最核心的研究定位。图1很适合在阅读原文时作为总览入口。
二、主要研究方法或创新点
1. 提出“天气条件驱动的分支路由”框架
论文最大的创新,是把LiDAR-Radar融合检测重构为一个Weather-Conditioned Branch Routing问题。不同于传统方法直接融合出单一路径,作者显式保留了三条并行表示分支:
- LiDAR-only branch
- Radar-only branch
- Fusion branch
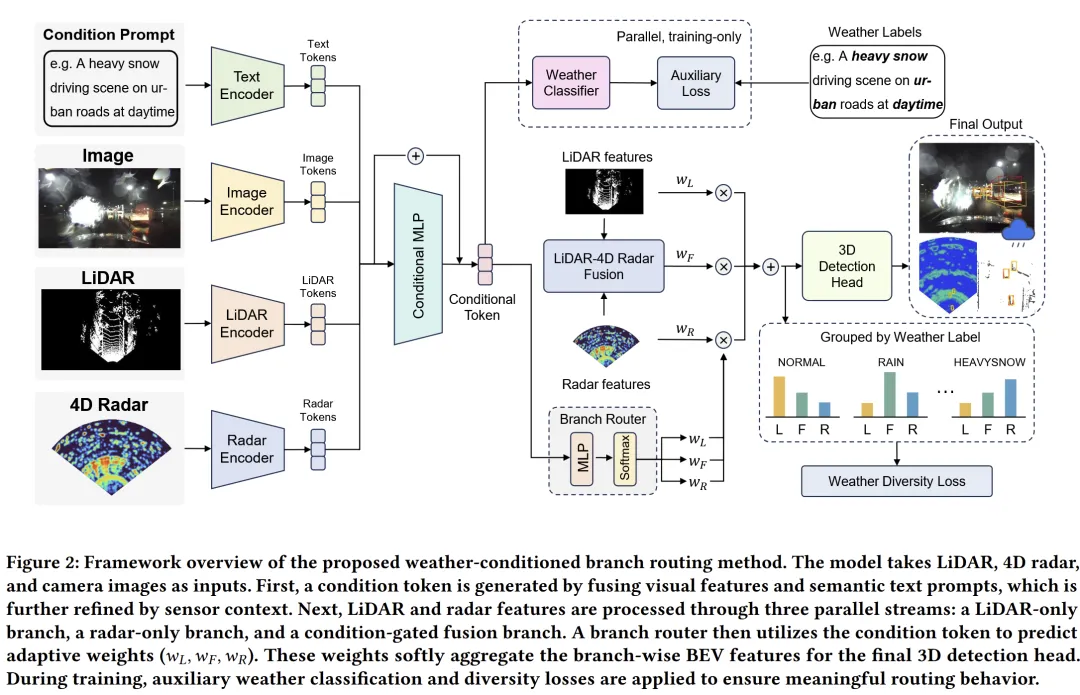
随后,模型通过一个分支路由器,根据当前场景的天气条件,为三条分支预测自适应权重,再进行软聚合,输出最终BEV特征用于3D检测。也就是说,模型不是“先固定融合再检测”,而是“先判断当前场景更适合哪种表示,再决定各分支贡献多少”。这一点从图2的整体框架图中表现得非常清楚。
2. 构建天气条件表征:视觉 + 文本 + 传感器上下文
为了让路由器知道“现在是什么天气、该偏向哪类分支”,作者设计了一个condition token(条件token)。
它由三部分信息构成:
- 视觉条件信息:使用前视相机图像,经一个预训练天气分类网络提取视觉token;
- 语义天气信息:借助冻结的CLIP文本编码器,将“A {weather} driving scene”这类天气文本提示编码成语义token;
- 传感器上下文信息:再把LiDAR与Radar的全局特征做池化后输入MLP,对条件token进一步修正。
这样得到的条件token,不是简单的天气标签,而是一个融合了图像外观、天气语义先验、当前传感器观测状态的连续表示,更适合做数据驱动的路由决策。论文中这一部分主要对应方法章节3.1与3.2,图2也给出了很清晰的流程示意。
3. 设计条件调制的融合分支
在三条分支里,最有技术含量的是Fusion branch。它并不是简单把LiDAR和Radar特征拼接,而是在每一层中,让LiDAR体素去检索附近的Radar体素,通过KNN注意力聚合Radar上下文;随后再由条件token生成门控,对Radar信息注入强度进行调制。
这意味着:
- 在天气较好时,模型可以更保守地保留LiDAR几何优势;
- 在天气恶化时,模型可以更积极地吸收4D Radar信息。
这种“天气条件控制的跨模态注入”比统一的固定融合更灵活,也更符合传感器物理特性。
4. 用天气监督避免“分支塌缩”
作者指出,如果只靠检测损失训练,路由器容易出现branch collapse(分支塌缩):模型过早偏向某一个强势分支,特别是融合分支,导致学不到真正有区分度的天气偏好。为此,论文加入了三类关键训练约束:
- 辅助天气分类损失:强迫condition token保留天气判别信息;
- 天气多样性正则项
- 分支熵正则与权重下界:防止训练早期路由过于极端,保证三条分支都保持活性。
这部分非常重要,因为它解释了本文为什么不只是“加一个router”,而是把路由可学习性和天气可分性也一起设计进来了。
三、实验结果
1. 在K-Radar上取得最优结果
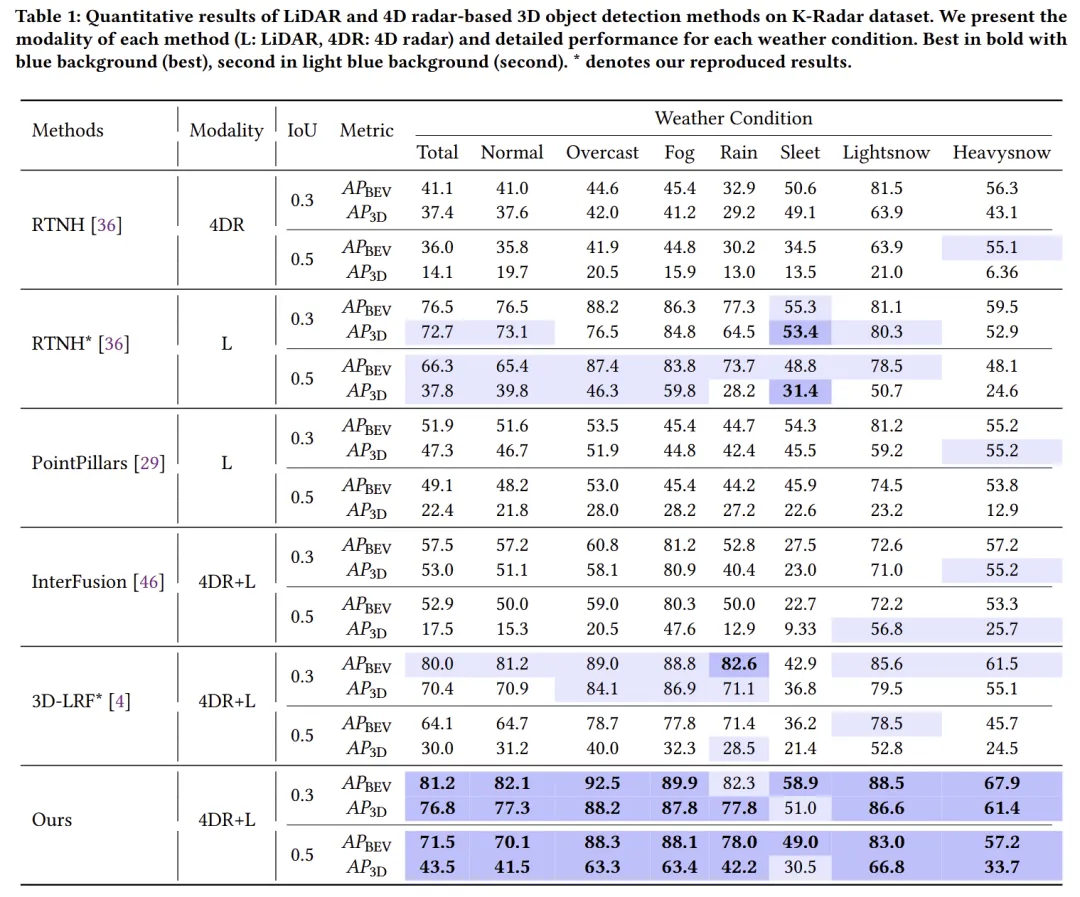
论文在K-Radar数据集上进行实验,评估对象为Sedan类别,指标为AP3D与APBEV。结果显示,本文方法相较此前强基线3D-LRF*取得了明显提升。
表1:与现有方法对比
根据表1:
相较3D-LRF*:
这说明本文的提升尤其体现在更严格IoU阈值下的精确定位能力。
2. 恶劣天气下提升更明显
表1中最值得注意的是不同天气条件下的结果。作者方法在overcast、fog、light snow、heavy snow等条件下都比3D-LRF*更强,尤其在IoU=0.5时提升非常明显:
- Overcast
- Fog
- Light Snow
- Heavy Snow
这说明本文方法并不是在“平均意义上更强”,而是在最关键的恶劣天气鲁棒性方面确实做出了有效提升。
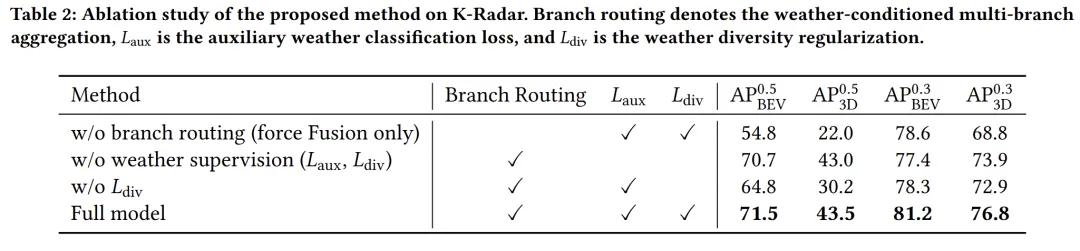
3. 消融实验验证了各模块必要性
表2:关键模块消融
作者做了非常清晰的消融实验:
- 去掉branch routing,只保留fusion branch
- 去掉天气监督(Laux 和 Ldiv)
- 只去掉多样性正则 Ldiv
这表明:
4. 路由器结构上,简单MLP最好
表3比较了三种路由器:
结果表明,最简单的MLP反而效果最好。在IoU@0.5下:
- Transformer:48.17 / 27.31
- Cross-attention:56.8 / 33.9
这说明:对于“由天气token映射到分支权重”这件事,轻量、直接的映射比复杂交互更稳定、更有效。
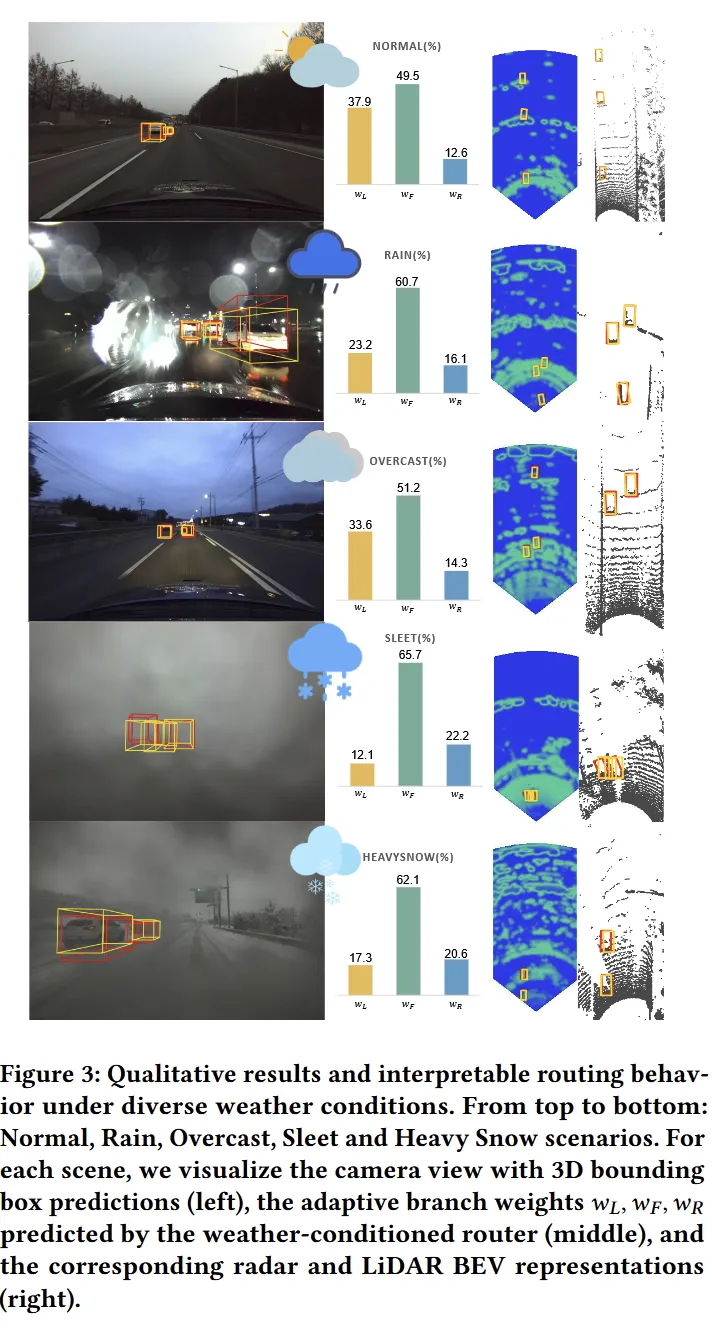
5. 定性分析展示了很强的可解释性
图3非常值得看。它展示了不同天气下,模型对三条分支权重的变化:
- Normal:LiDAR 37.9%,Fusion 49.5%,Radar 12.6%
- Rain
- Heavy Snow:LiDAR降到 17.3%,Fusion为 62.1%,Radar升到 20.6%
这说明模型确实学会了一个符合直觉的规律:
- 在重雪等严重退化场景下,会明显压低纯LiDAR分支权重。
这也是本文区别于一般“性能提升型论文”的地方:它不仅更准,而且更能解释为什么这样决策。
四、总结
这篇论文的核心价值在于:它没有继续沿着“设计更复杂的统一融合骨干”这条常规路径前进,而是提出了一个更符合真实自动驾驶场景的思路——显式保留多种表示,再依据天气动态选择。这种做法带来了三方面收益:
- 鲁棒性更强
- 定位更准
- 可解释性更好:能清楚看到模型何时更依赖LiDAR、何时更依赖Radar。
如果从研究趋势看,这篇工作有点像把“Mixture-of-Experts / 动态路由”的思想引入到多模态3D检测里,而且结合了天气监督,使得“动态选择”不再停留在概念层面,而真正落到了自动驾驶恶劣天气感知任务上。整体上,这是一篇思路清楚、实验扎实、可解释性强的论文。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~本文仅做学术分享,如有侵权、笔误等,请联系修改、删文.

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
