华为突然发布重磅系统!自动驾驶开始自己"琢磨"开车,中国车主有福了
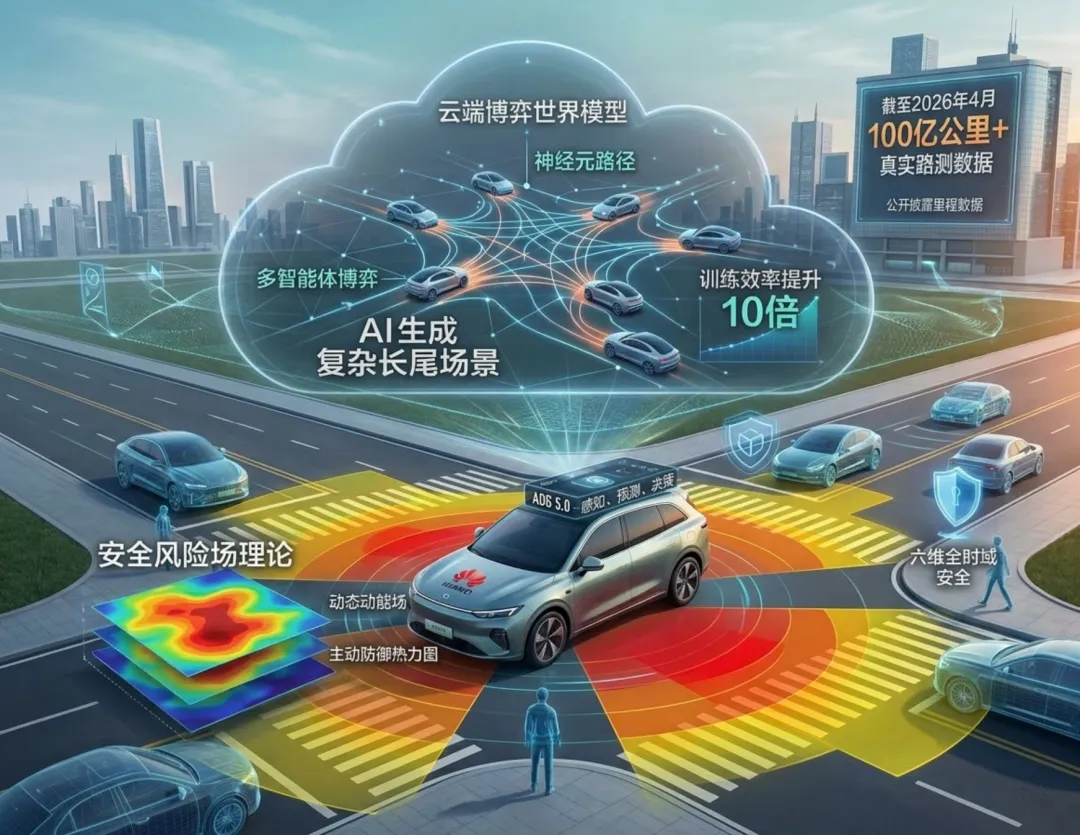
4月24日,华为毫无预警地发布了一套重新定义智能驾驶技术逻辑的系统——乾崑智驾ADS 5.0。同一天,整个自动驾驶行业见证了一个技术路线分歧的诞生:华为在云端部署多智能体博弈世界模型,让车辆的学习不再依赖真实路测数据的缓慢积累;车端则引入安全风险场理论,通过量化动态风险热力图实现主动防御。这两套机制合在一起,构成了一个"边生成、边学习、边验证"的闭环——从本质上说,华为让自动驾驶系统学会了自己给自己出题、自己给自己考试。这不是一次常规的版本迭代。这是一次技术哲学的转变。从"看见"到"预见"
过去,自动驾驶系统的安全策略主要基于"看见":摄像头捕捉到障碍物,系统识别,然后刹车。但物理意义上的"看见"永远存在盲区和反应延迟。一个突然出现的行人、一辆Cut-in的车辆,系统从"看见"到"决策"之间的时间窗口,往往就是事故发生的窗口。ADS 5.0试图跨越这道鸿沟。它在车端引入"安全风险场理论",将车辆周围的物理空间量化为"动能场""势能场"与"行为场",基于此生成动态风险热力图。系统不再只是"看见"障碍物,而是"感知"整个环境中每一个移动物体的潜在意图。这个逻辑是:在一个交通场景里,不仅要识别出这辆车在哪里,还要预判它接下来三秒会做什么、会往哪个方向移动、会对我的行驶路线产生什么影响。风险不再是静态的碰撞概率,而是动态的、时序的、博弈的。云端世界模型:10倍训练效率意味着什么
ADS 5.0在云端引入的多智能体博弈世界模型,是另一个被低估的技术突破。传统自动驾驶训练依赖真实路测数据——车队在真实道路上跑,收集各种场景Corner Case,然后用于模型训练。这种方式的瓶颈在于:真实道路上的Corner Case出现频率极低,数据采集效率受制于物理世界的运行节奏。一个罕见的长尾场景,可能需要车队跑几百万公里才能积累到足够的训练样本。世界模型的解决思路是:让AI在虚拟环境中生成各种复杂场景,让自动驾驶系统在这个虚拟环境中学习应对。系统可以在虚拟环境中遭遇十万种不同天气、不同光线、不同加塞行为、不同交通参与者的交互模式——而所有这些场景,不需要真实道路上跑一公里。华为表示,WEWA2.0架构结合世界模型将训练效率提升了10倍。10倍效率提升意味着:过去需要一年才能训练完成的模型,现在只需要一个多月。这种速度优势,在L3级自动驾驶规模化商用这个时间窗口上,可能是决定性的。六维安全体系:给AI驾驶加上"安全锁"
ADS 5.0的安全体系从"五维"升级为"六维",新增"全时域安全"维度。这个新增维度的核心逻辑是:自动驾驶的安全不仅是"行驶中"的问题,也是"行驶前"和"行驶后"的问题。事前,五公里内险情弹窗、路口超速主动降速;事中,碰撞预防;事后,被追尾时第三排座椅联动防护、爆胎稳定控制辅助、驾驶员失能辅助等。这不是简单的功能堆砌,而是一种系统性的安全设计思路:把驾驶安全的边界从"避免碰撞那一刻"延伸到"整个出行生命周期"。100亿公里:数据壁垒正在形成
截至2026年4月19日,乾崑智驾累计辅助驾驶里程已突破100亿公里。华为宣布将在官网实时公开这一数据。100亿公里是什么概念?它意味着全球任何其他自动驾驶系统都没有积累到这个量级的真实运营数据。每多跑一公里,系统就多学习一个Corner Case,就多优化一个决策模型。这是数据驱动的AI系统最稳固的护城河。这也是华为ADS 5.0最被低估的优势:当训练效率提升10倍,加上100亿公里的真实数据积累,两者的叠加效应将使竞争对手追赶的难度成倍增加。规模化的前夜
华为ADS 5.0的发布,是L3级自动驾驶规模化商用前夜的一次关键落子。云端世界模型突破训练效率瓶颈,车端安全风险场实现主动防御,六维安全体系覆盖全时域出行生命周期,加上100亿公里真实路测数据的积累——华为正在构建一套从数据采集、模型训练、功能验证到车端执行的完整闭环。这套闭环一旦跑通,L3级自动驾驶从"演示"走向"标配"的窗口就将彻底打开。接下来的问题是:当华为的L3方案开始规模化搭载,竞争对手们还能跟得上吗?