自动驾驶测试中的关键交互对象:电动二轮车行为分析与建模
- 2026-05-08 20:46:52
自动驾驶汽车正逐步驶入城区,所面对的交通环境也愈发复杂。尤其在城区的交叉口,非机动车行为灵活多变,是一类极具挑战的交互对象。如何在安全、通行效率和驾乘舒适之间取得平衡,不仅困扰着经验丰富的人类驾驶员,更是自动驾驶系统面临的一道难题。
然而,目前多数研究关注自动驾驶汽车如何与人类驾驶汽车进行交互,车辆行为建模已相对成熟,能够顺利接入各类仿真平台,并实现闭环测试。相较之下,涉及机非冲突的非机动车行为建模则显得薄弱;即便是以非机动车为对象的研究,也往往聚焦于非机动车车道上非机动车群体内部的交互行为,较少考虑汽车的介入与影响。
正是出于填补这一空缺的初衷,本文尝试为自动驾驶闭环仿真构建一个更加真实、合理的非机动车冲突行为模型。具体地,本文以行为激进、风险更高的电动二轮车作为非机动车的代表。本研究首先基于自然驾驶数据中的机非冲突轨迹,深入分析电动二轮车的交互行为,提取出一个关键表征指标——预期后侵入时间;随后,将该指标融入强化学习框架,构建出能够复现真实机非冲突场景的电动二轮车行为模型;最后,将这一模型作为自动驾驶汽车的交互对象,与不同被测系统进行了多轮闭环仿真测试。
对于关心自动驾驶如何应对城区复杂交互的工程师和研究者而言,这篇文章提供了一条从行为分析到仿真测试的思路,可供进一步研究与实践中参考。
本文的主要内容来自:
Liu Z, Qin J, Chen J, et al. Classifying interaction patterns of powered two-wheelers during severe conflicts with cars at intersections: a naturalistic driving data study[J]. Transportmetrica B: Transport Dynamics, 2026, 14(1): 2621332.
1
引言
电动二轮车在交通系统中的现状:
暴露率高:电动二轮车是交通系统的重要组成。据《2025年中国两轮电动车行业研究报告》,我国电动二轮车的保有量已超过4.2亿辆,且未来仍有不小的上升空间。
伤亡比例多:据北京交管部门公布数据,2025年,北京市电动二轮车驾乘人员死亡事故数占全部死亡事故总数的35%。 冲突程度强:在SinD数据集[1]中,天津某十字路口的电动二轮车闯红灯占比为32.7%;此外,部分人员驾驶电动二轮车用作商业用途时,具有更激进的行为,如从拥堵车流中穿梭。
图1 交叉口电动二轮车交互场景
上述行为在城市交叉口中屡见不鲜,即便是人类司机,在与他们交互时依然是一项不小的挑战。因此,有必要对机非冲突中电动二轮车的行为开展分析,分析框架见下图,具体流程如下:
数据处理:从自然驾驶数据中筛选得到机非冲突轨迹
特征选取:按照交互过程的不同阶段分别选取特征指标
实验与分析:采用先分类再聚类的方法得到电动二轮车的若干类簇,开展相应分析
行为机制讨论:从安全目标、交互战术和具体操作三个层次对电动二轮车的行为机制展开讨论
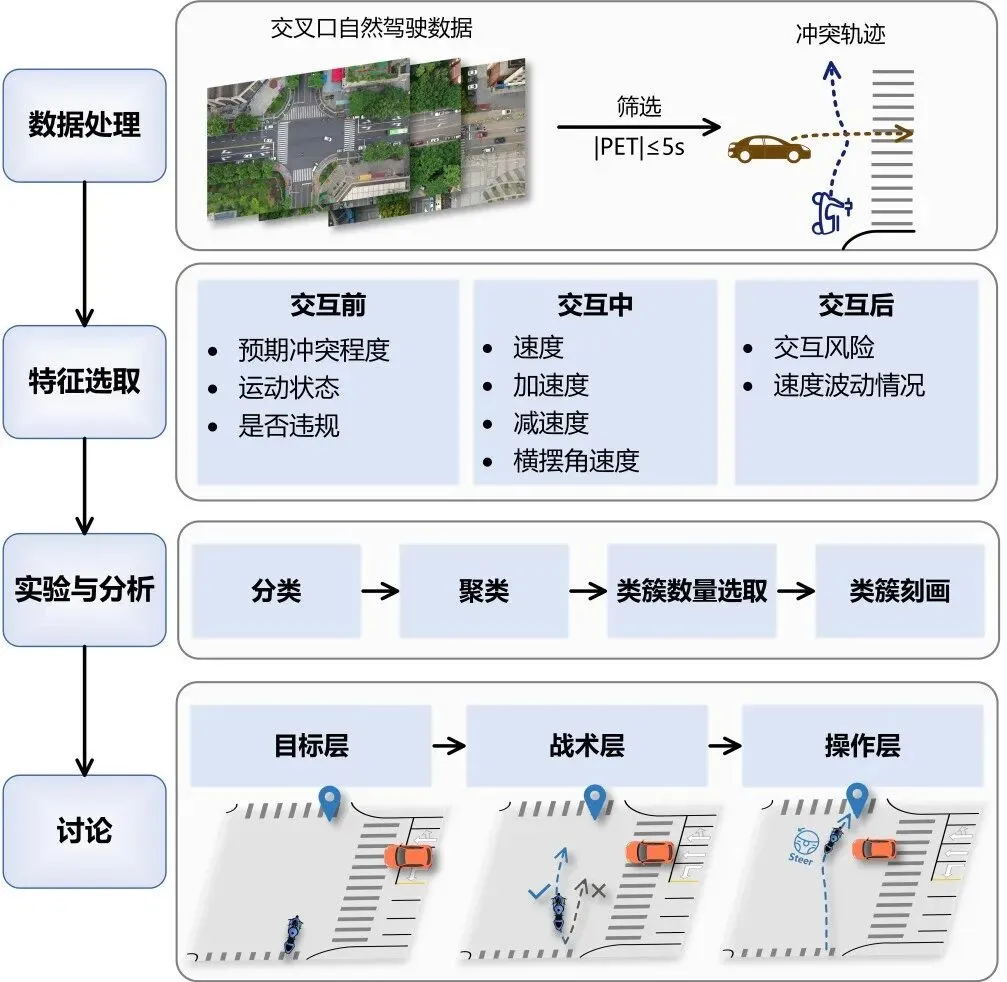
图2 电动二轮车交互行为分析框架
2
数据介绍
本文基于天津、西安和上海三座城市各一个十字路口的自然驾驶数据,共筛选得到1871个电动二轮车与汽车的一对一交互场景,其中电动二轮车直行1416个,转弯455个。各路口的基本信息见下方表格和图片,可以看到三个路口在拓扑结构和要素构成上是类似的。经检验,三个路口的数据相互之间无显著性差异,因此后续将综合全部数据统一分析。


图3 各交叉口图片
3
分类与聚类
本文采用了一种先按电动二轮车的驾驶任务(直行/转弯)和交互决策(超车/避让)分类、再基于K-means++算法和特征指标聚类的分析路径。这一设计旨在防止电动二轮车的行为受到驾驶任务和交互决策不同带来的干扰,以更精准分析不同情况下的电动二轮车冲突行为机制。
3.1 分类
电动二轮车两类交互决策的定义,及相应的真实交互视频如下:
超车:在遇到汽车时,电动二轮车速度增加或不变,有时其运动方向朝汽车头部方向偏移(以保证足够的超车空间),优先于汽车通过冲突点。
避让:在遇到汽车时,电动二轮车速度减小或不变,有时其运动方向朝汽车尾部方向偏移(以保证一定的通行效率),落后于汽车通过冲突点。
图4 超车:电动二轮车从车头前方超车
图5 避让:电动二轮车从汽车尾部避让
3.2 聚类
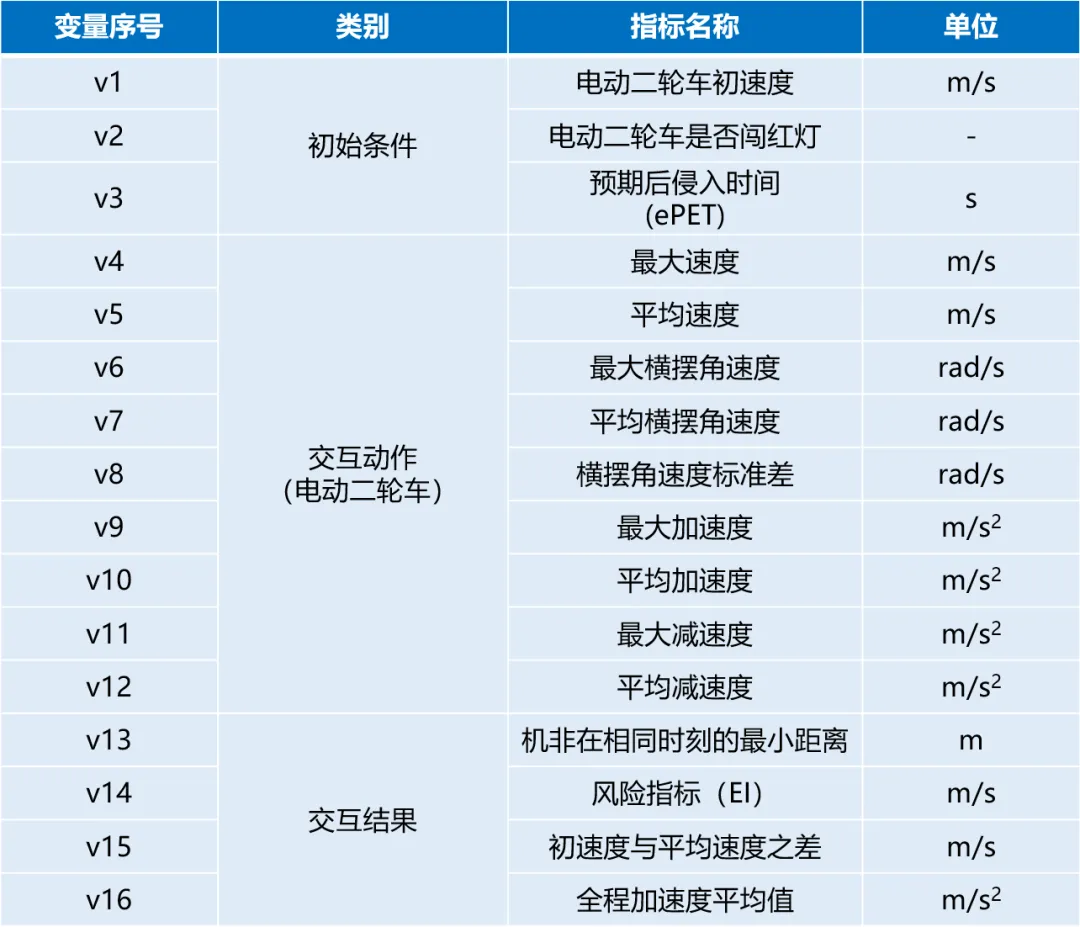
针对聚类阶段使用的特征指标,本文将交互全程分为初始条件(交互前)、交互动作(交互中)和交互结果(交互后)三个阶段,各阶段分别选取对应指标,以对电动二轮车的交互行为进行全面分析。
基于上述指标计算结果,采用K-means++算法开展聚类并选取最优类簇数量,各类簇间关系见下图。
提前预判型:电动二轮车预判汽车不会影响自身,轻微调整运动状态,平稳且快速地通过路口。
主动响应型:电动二轮车随汽车运动状态的变化而变化,其在速度和/或角速度上变化明显。
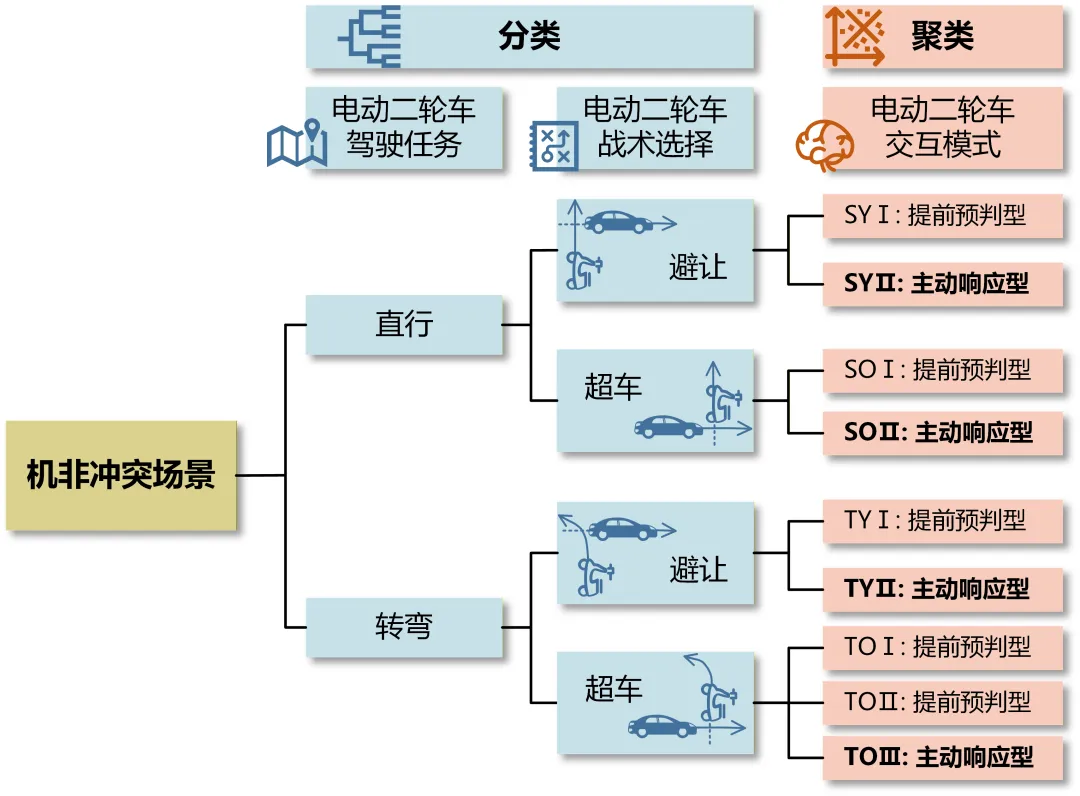
图6 各类簇关系图
4
类簇分析
受限于篇幅,这里仅围绕主动响应型电动二轮车的分析开展进一步的介绍,感兴趣的读者可以阅读原论文[2]。
下面分别展示了电动二轮车直行避让和直行超车时的交互过程示意图。该类电动二轮车在交互过程中具有明显的运动状态变化,如直行避让时通过显著减速,或者在调整速度的同时朝汽车尾部方面偏转航向。同时,该类电动二轮车的交互风险和闯红灯的比例均较高。
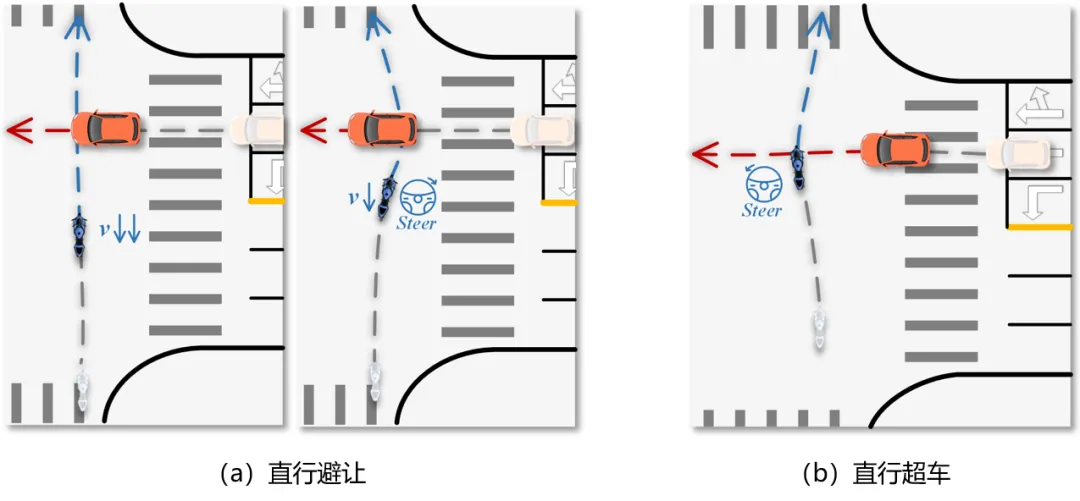
图7 主动响应型电动二轮车直行交互示意图
下面分别展示了电动二轮车转弯避让和转弯超车时的交互过程示意图。该类电动二轮车除明显的运动状态变化外,还可能伴随转弯路径的变化。
如转弯避让时,电动二轮车在明显减速的同时还维持了一段直行路径,以寻找合适的转向间隙;转弯超车时,电动二轮车通过提前执行转向动作,以更改路径提前转弯的方式完成交互。
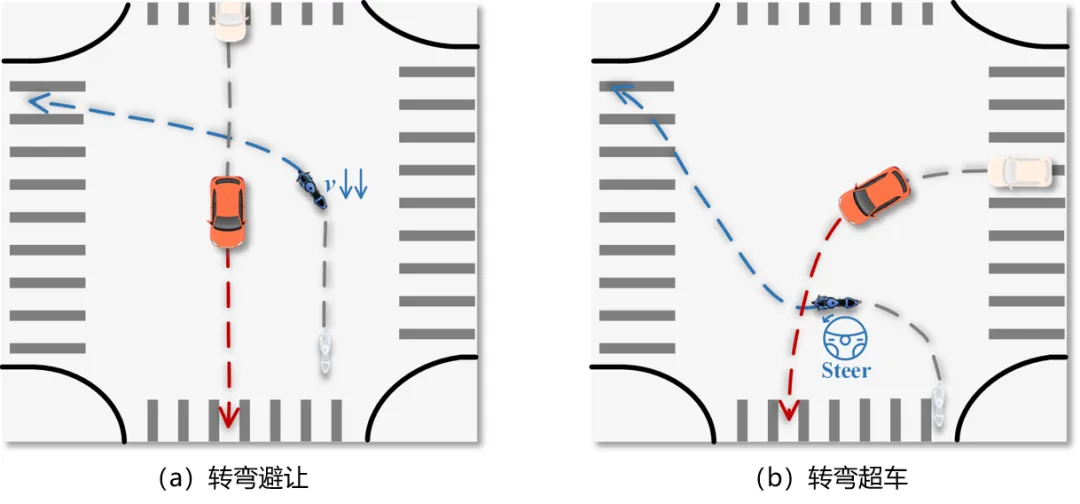
图8 主动响应型电动二轮车转弯交互示意图
5
行为机制讨论
本文从目标层、战术层和操作层三个层级对电动二轮车的交互行为机制开展进一步的讨论,重点关注电动二轮车驾驶员的决策过程及其交互行为的完整演化过程。下图展示了电动二轮车交互行为机制讨论框架。
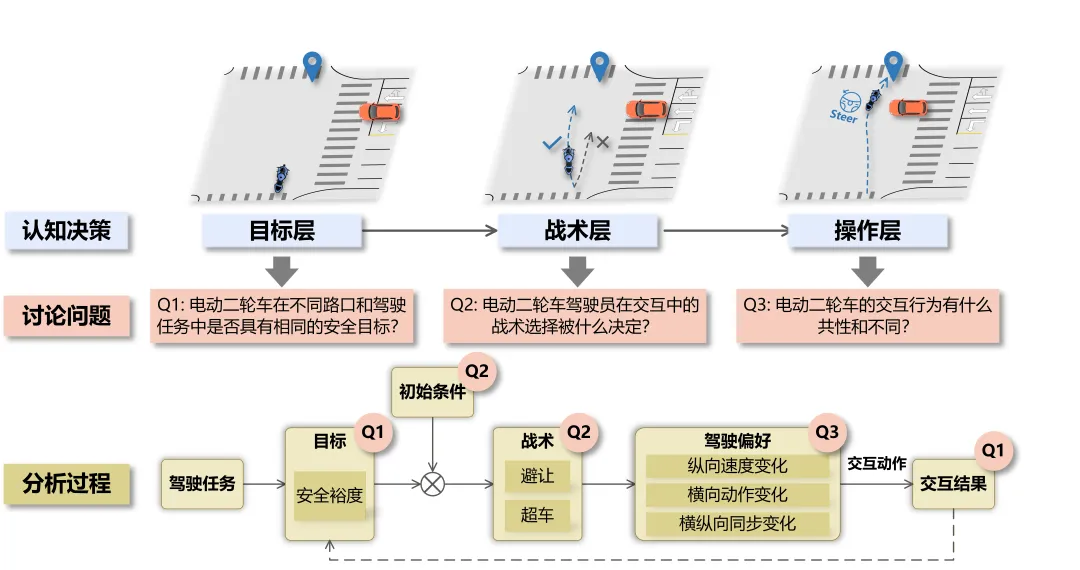
图9 电动二轮车交互行为机制讨论框架
5.1 目标层
目标层对应电动二轮车在交互中的安全诉求。电动二轮车会在机非冲突前设定其期望的安全目标,实际风险则可以通过结果中的指标反映。具体地,本文选用后侵入时间(Post-Encroachment time, PET)作为风险指标。
下图分别展示了不同交叉口和不同驾驶任务的PET绝对值显著性检验及差异效应值,表明相互之间未达到显著性水平或显著性差异的效应未达到单独讨论标准。可以认为在各类机非冲突场景中电动二轮车展示出了一致的安全目标。
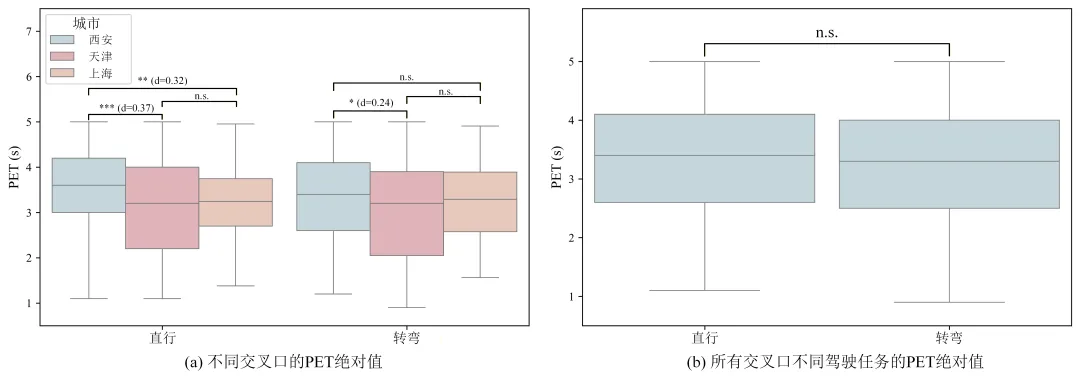
图10 电动二轮车与汽车冲突场景中
PET绝对值显著性分析结果
5.2 战术层
战术层关注电动二轮车在交互中的具体战术选择(超车或避让),研究其决策的原因。本文采用预期后侵入时间(expected Post Encroachment Time,ePET)这一指标,对超车组与避让组在初始时刻的ePET进行显著性检验。ePET综合表征了初始状态,它是在假设双方运动状态不变的前提下,计算到达轨迹交叉点的时间差,公式如下:

两组ePET的显著性检验结果见下图。结果表明,两组指标具有显著性差异且不可忽略,同时两组中多数样本(超过75%)的正负不同,表明ePET正负与否是电动二轮车进行战术选择的重要判断依据。
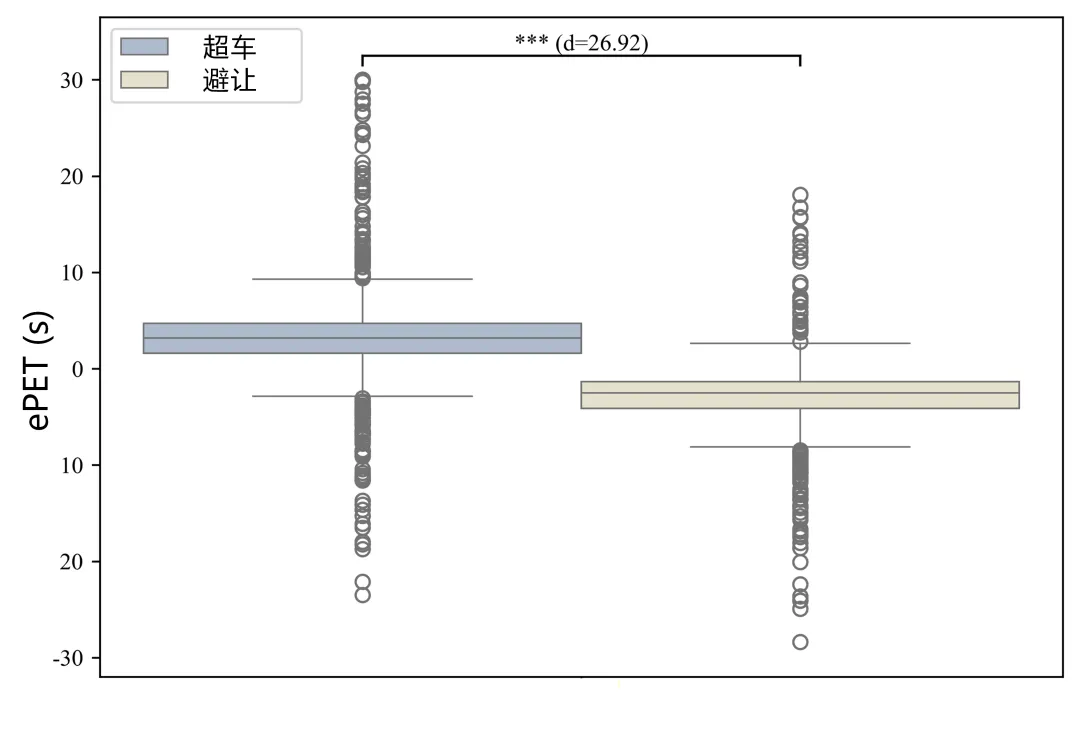
图11 超车组和避让组ePET的显著性分析结果
5.3 操作层
操作层侧重讨论电动二轮车在具体动作执行时的共性与差异。根据电动二轮车动作特点,可以分为路径变化型(转向动作为主)、速度调整型(速度变化为主)和综合调整型(两者兼有)。
各类别在初始条件和交互结果上指标的显著性检验结果见下图,表明均未达到显著性差异水平。由此说明,即便具有相同的安全目标和初始条件,电动二轮车驾驶员的具体动作可能会由于驾驶偏好而非场景参数而有所不同,呈现出明显的多模态动作。
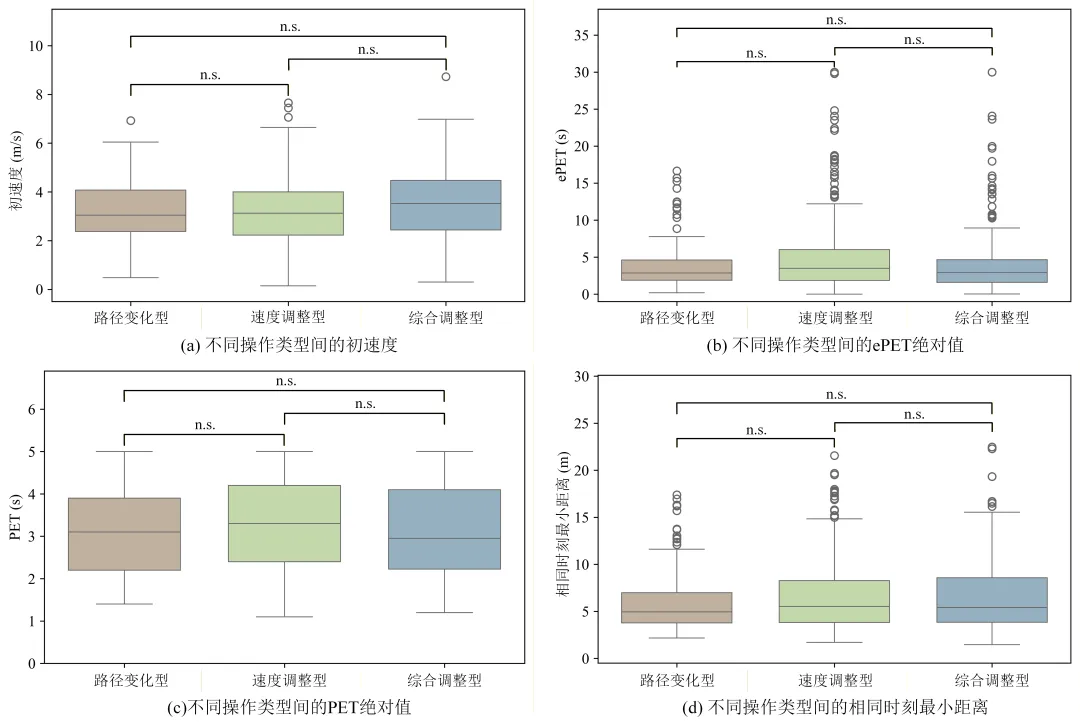
图12 不同操作类型间各指标显著性分析结果
6
探索:电动二轮车冲突行为建模
在先前的研究中,作者团队曾改进了社会力模型并在仿真交叉口环境中实现了电动二轮车直行行为模型构建,以支持自动驾驶的闭环仿真测试。(详见两轮车运动行为建模探索与实践)
然而,该模型存在以下两方面的局限:一方面,它在与预定义轨迹的汽车交互时具有较好的表现,而在与汽车模型进行双向交互,其泛化能力便显不足;另一方面,社会力模型的目标表达相对简化,且对于连续变化的横向运动行为刻画不足,因此难以通过简单修改实现电动二轮车的合理转弯行为建模。
针对上述问题,为了给自动驾驶汽车的闭环仿真测试提供更加真实、合理的交互对象,作者团队基于上述分析和讨论结果,将影响电动二轮车交互决策关键指标「ePET」应用至强化学习的奖励函数设计中,进而指导电动二轮车行为模型的构建,实现电动二轮车在不同驾驶任务(直行和转弯)下的合理交互行为复现。
下面分别展示了作者团队构建的电动二轮车模型与两个自动驾驶被测系统的交互过程,其中VUT1为基于层次博弈和蒙特卡洛树搜索的方法[3]、VUT2为基于规则的IDM方法。可以看到电动二轮车模型在面临不同类型的被测系统时,均能够实现较好直行和转弯驾驶任务,并做出合适的避让与超车决策,有潜力作为自动驾驶闭环仿真测试中的有效交互对象。
下面分别展示电动二轮车模型与VUT1的直行和左转交互示例。
图13 电动二轮车模型直行时与VUT1交互示例
图14 电动二轮车模型转弯时与VUT1交互示例
下面分别展示电动二轮车模型与VUT2的直行和左转交互示例。
图15 电动二轮车模型直行时与VUT2交互示例
图16 电动二轮车模型转弯时与VUT2交互示例
7
总结
城市道路中,电动二轮车行为灵活、轨迹多变,是自动驾驶汽车在城区场景中一类关键交互对象。为支持闭环仿真测试的开展,本文基于自然驾驶数据,采用先分类再聚类的方法,对交叉口机非冲突中的电动二轮车交互行为进行了分析;随后依据分析结果,构建了电动二轮车的冲突行为模型,并将其接入了仿真环境,实现了闭环测试。
面向未来工作,工程应用层面需进一步构建该模型与主流仿真平台的接口,以便对更多自动驾驶系统开展闭环测试;行为建模层面,电动二轮车在高密度路口中穿梭与集群行驶时的行为机制仍有待研究,以在仿真环境中复现更加多样的机非冲突场景。
8
致谢
感谢SinD团队[1]提供的十字路口轨迹数据集
(http://github.com/SOTIF-AVLab/SinD)
感谢土木工程学院的秦蛟同学对于本研究的贡献
参考文献:
[1] Xu Y, Shao W, Li J, et al. SIND: A Drone Dataset at Signalized Intersection in China[C]//2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2022: 2471-2478.
[2] Liu Z, Qin J, Chen J, et al. Classifying interaction patterns of powered two-wheelers during severe conflicts with cars at intersections: a naturalistic driving data study[J]. Transportmetrica B: Transport Dynamics, 2026, 14(1): 2621332.
[3] Github. The decision-making of multiple vehicles at intersection bases on level-k game and MCTS[EB/OL]. [2026-05-08]. https://github.com/PuYuuu/vehicle-interaction-decision-making.
责编丨高炳钊
| 联系人:李老师 |
| 电话:15821568676 |
| 邮箱:lixue@tongji.edu.cn |
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 所有女生们出来聊聊,你们是喜欢开轿车还是喜欢SUV要女生们发生哦?
- 理想全尺寸旗舰SUV即将上市!双拼色豪华车身,配800V全主动悬架
- 12万买中大型SUV,车长近5米,配2.0T+8AT,可以5座和7座
- 5月10日预展丨421台电动轿车即将拍卖
- 小米增程 SUV 去除重伪装了,车灯超大气!
- 奇瑞全新插混中型SUV即将上市!七座布局可选,综合续航超1400Km
- 自动驾驶重卡第一股要来了!去年入账40亿,销量暴涨两倍
- 【E汽车】15万级家用新能源SUV怎么选?东风日产NX8值得闭眼入
- 心理恢复力:别让“自动驾驶”接管你的生活
- 50万级纯电豪华SUV,到底是不是在为Logo买单?我把凯迪拉克凯威德“拆”给你看
