当自动驾驶系统搞不定时,驾驶人如何接管?一项新团体标准来了
随着L3级自动驾驶车辆逐步上路,一个关键问题浮出水面:当系统发出“请接管”请求时,驾驶人的反应和操作到底好不好?🤔 如何科学、客观地评价驾驶人的接管表现?近日,由中国智能交通产业联盟归口、中国科学院软件研究所等单位起草的《自动驾驶车辆驾驶人接管绩效测评方法》(征求意见稿)正式发布。这份标准为自动驾驶车辆驾驶人的接管绩效测评提供了一套完整的指标体系、评分机制和测试方法。
一、为什么要测评“接管绩效”?🎯
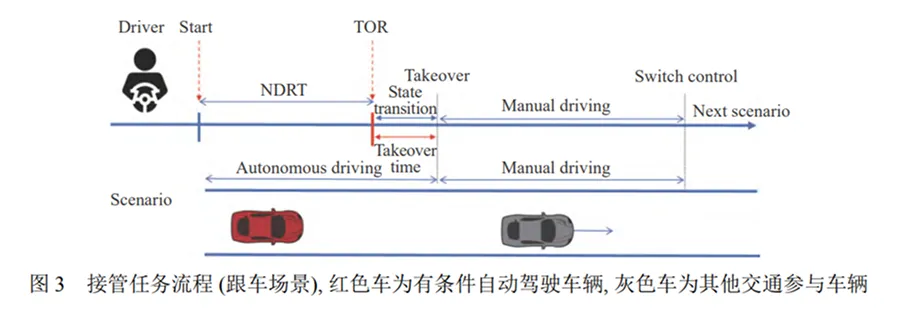
L3级自动驾驶意味着在特定条件下,车辆可以自主完成驾驶任务,但当系统遇到超出能力范围的情况(如施工路段、紧急障碍物)时,会请求驾驶人接管。接管绩效,简单说就是驾驶人在接管过程中的驾驶操作综合表现。它直接影响行车安全和人机共驾体验。如果驾驶人反应太慢、操作太猛,事故风险就会大幅上升。因此,建立一套科学的测评方法,对车辆设计、驾驶培训乃至法规制定都意义重大。
二、评价体系:两大维度,六个核心指标 📊
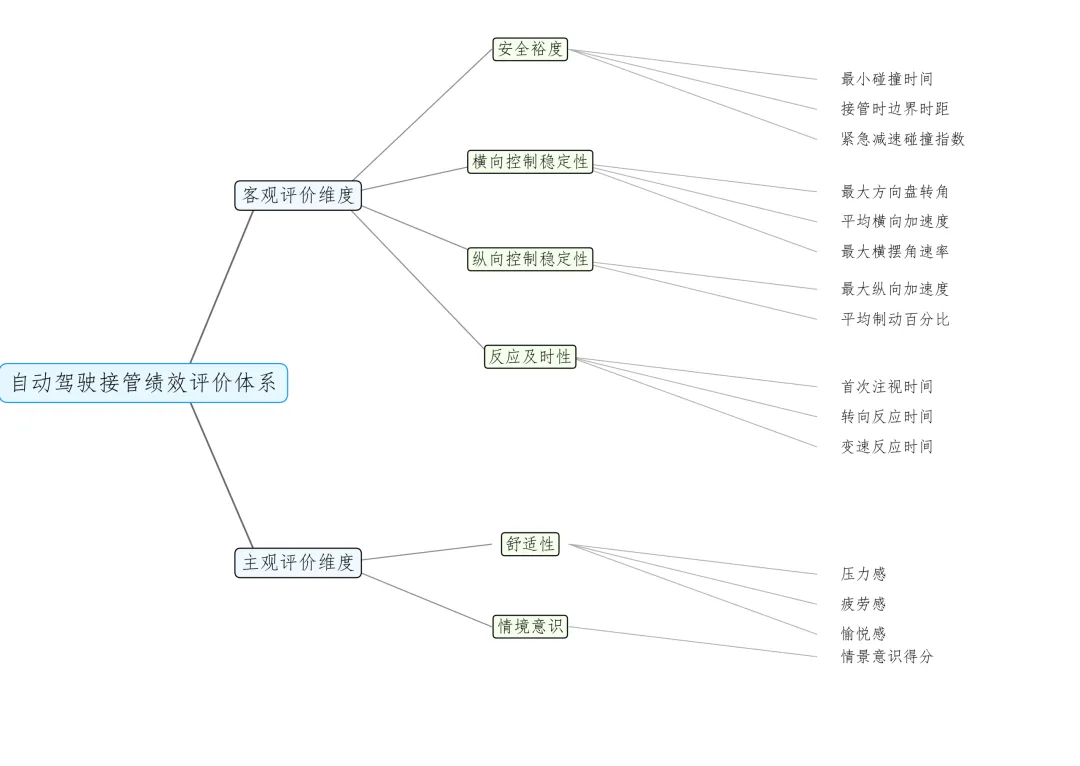
这份标准将接管绩效分为客观评价和主观评价两大维度,下设6个一级指标和15个二级指标。📈 客观评价维度(看数据说话)
| | |
|---|
| 安全裕度🛡️ | | |
| 横向控制稳定性🚘 | | |
| 纵向控制稳定性⏬ | | |
| 反应及时性⏱️ | | |
💡 举个例子:首次注视时间 指从接管请求发出到驾驶人视线首次落到接管相关区域的时间——越短说明警觉性越高。
😌 主观评价维度(驾驶人说了算)
| | |
|---|
| 舒适性🛋️ | | 压力感(PSS量表)、疲劳感(KSS量表)、愉悦感(SAM量表) |
| 情境意识🧠 | | |
三、怎么算分?加权平均法 🧮
整体得分= 客观评价维度得分 × 权重 + 主观评价维度得分 × 权重每个维度下的一级指标、二级指标同样按权重加权平均。各层级权重可灵活设定,但同一层级内的权重之和必须为100%。🧪 举个例子:如果你在某次接管中安全裕度很高、反应很快,但刹车过猛导致纵向稳定性差,整体得分就会受到影响。
这套评分机制可以量化“接管绩效”,方便不同驾驶人、不同场景之间的比较。
四、怎么测试?三步走 🧪
车辆:L3级M1类乘用车,数据采集完备,安全装置齐全 🚙驾驶人:C照以上、1年以上驾龄、无严重违法记录、具备自动驾驶操作经验 👨✈️平板电脑📱:收集主观量表数据(PSS、KSS、SAM、SART)前方障碍接管🚧:静止或低速障碍物(如故障车、锥桶)每个场景重复不少于3次,全程记录动力学数据、眼动数据、反应时间,每次接管后立即填写主观量表。
五、思考 💭
这份标准征求意见稿是国内在自动驾驶人机交互测评领域的一次重要尝试。它的出现,至少带来了三方面的价值:此前业内对接管绩效的评价往往只关注反应时间或碰撞时间,比较碎片化。本标准构建了一个客观+主观、多维度、可量化的体系,让测评更有章可循。不仅是机械地测反应速度,还关注驾驶人的压力、疲劳、愉悦感和情境意识。这体现了以人为本的设计理念——好的接管体验,不是把人当“应急按钮”,而是让人在接管时感到从容可控。OEM和方案商可以依照本标准进行内部测试,优化接管提示策略、人机交互界面甚至驾驶辅助算法;监管机构也可参考该标准制定更细化的准入要求。当然,这份标准目前还是征求意见稿,也有一些值得继续探讨的地方:🤔权重如何确定?标准给出了加权平均的框架,但没有给出具体的默认权重值。不同的场景下,安全裕度和舒适性哪个更重要?这可能需要针对不同应用场景制定子标准。测试环境的局限性:封闭场地或者可控条件下的测试,与真实开放道路上的随机应变仍有差距。未来是否需要引入自然驾驶数据来补充?量表的适用性:在紧急接管后立即让驾驶人填量表,会不会因为紧张或时间压力导致数据偏差?如何平衡“及时填写”与“情绪稳定后填写”的矛盾,值得优化。总体而言,这份标准迈出了可喜的一步。随着L3级自动驾驶逐步商用,“人机共驾”的协作质量将成为核心竞争力之一。希望未来能看到更多基于真实场景、大规模驾驶人的测评实践,让标准落地生根。🌱
本文根据《自动驾驶车辆驾驶人接管绩效测评方法》(征求意见稿)整理,内容仅供参考。完整标准请以最终发布版本为准。
https://www.c-its.org.cn/Index/show/catid/18/id/2526.html