具身智能 vs 自动驾驶:90%技术相似,为何走向不同未来?
自动驾驶是具身智能吗?两者技术到底有多相似?本文深度解析两大热门领域的技术异同。
🤔 一个关键问题
自动驾驶是具身智能吗?
答案是:是,但不完全是。
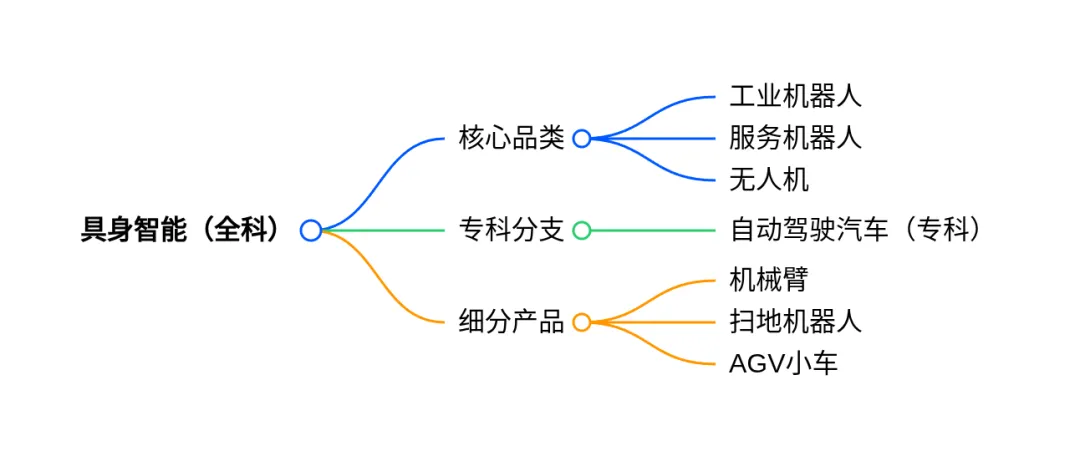
自动驾驶是具身智能在道路场景的专门应用,就像"专科医生"和"全科医生"的关系。
📊 一张图看懂关系
关系:自动驾驶 ⊂ 具身智能
🔍 技术相似度惊人
感知层:90%相似
两者都需要"看懂"世界:
差异点:
决策层:70%相似
两者都需要"思考"如何行动:
差异点:
控制层:60%相似
两者都需要"执行"动作:
差异点:
- 具身智能:自由度高(机械臂6-7 DOF),需要精细操作
- 自动驾驶:自由度低(车辆3 DOF),控制相对简单
⚡ 核心区别在哪里?
1️⃣ 安全性要求
自动驾驶的安全要求是"零事故",这是最大的技术挑战。
2️⃣ 实时性要求
自动驾驶必须在100毫秒内做出决策,否则可能酿成大祸。
3️⃣ 泛化能力
| | |
|---|
| 场景多样性 | 极高 | |
| 任务复杂度 | 极高 | |
| 环境适应性 | 室内外全场景 | |
具身智能需要适应各种环境:家庭、工厂、医院、商场...
自动驾驶专注于道路场景,但需要处理极端天气和复杂交通。
4️⃣ 操作精度
具身智能需要"绣花"般的精细操作,自动驾驶只需要"开车"级别的控制。
🚀 技术融合趋势
自动驾驶 → 具身智能
技术迁移:
- Occupancy Network → 3D场景表示
代表案例:
具身智能 → 自动驾驶
技术迁移:
代表案例:
🔮 未来:统一的大模型框架
趋势:通用具身智能大模型
┌─────────────────────────────────┐
│ 通用具身智能大模型 │
│ │
│ [视觉] [语言] [动作] │
│ ↓ │
│ 统一Transformer骨干网络 │
│ ↓ │
│ [机器人] [自动驾驶] [其他] │
└─────────────────────────────────┘
代表工作:
📝 总结
技术相似度
核心区别
💡 核心观点
自动驾驶是具身智能的"专科医生":专注于道路场景的智能移动
技术栈高度重叠:感知、决策、控制技术有70-90%相似性
应用场景差异大:具身智能场景更复杂多样
技术挑战不同:
未来融合趋势:统一的大模型框架将两者融合
🎯 给不同人群的建议
研究者
✅ 可以在两个领域间迁移技术
✅ 关注统一的大模型架构
✅ 重视跨领域数据集和基准
企业
✅ 建立统一的技术平台
✅ 共享基础设施和数据
✅ 培养跨领域人才
投资者
✅ 关注技术融合趋势
✅ 看好统一框架的公司
✅ 重视跨领域应用场景
🤝 互动话题
你认为未来会出现"全能型"具身智能吗?
欢迎在评论区分享你的观点!
关注我们,获取更多AI/智驾/具身智能前沿技术解读!
本文首发于微信公众号,转载请注明出处
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
