理想AD MAX/AD Pro自动驾驶域控制器拆解
- 2026-05-14 13:11:20
理想目前自动驾驶域控制器分AD Pro和AD MAX两种,全系列车型后缀为MAX和ULTRA的就是用AD MAX,后缀为Pro的就是用AD Pro。AD MAX以英伟达Thor-U为核心,AD Pro以地平线J6M为核心。

▲AD MAX Thor,图片上很清楚地显示是德赛西威汽车电子生产

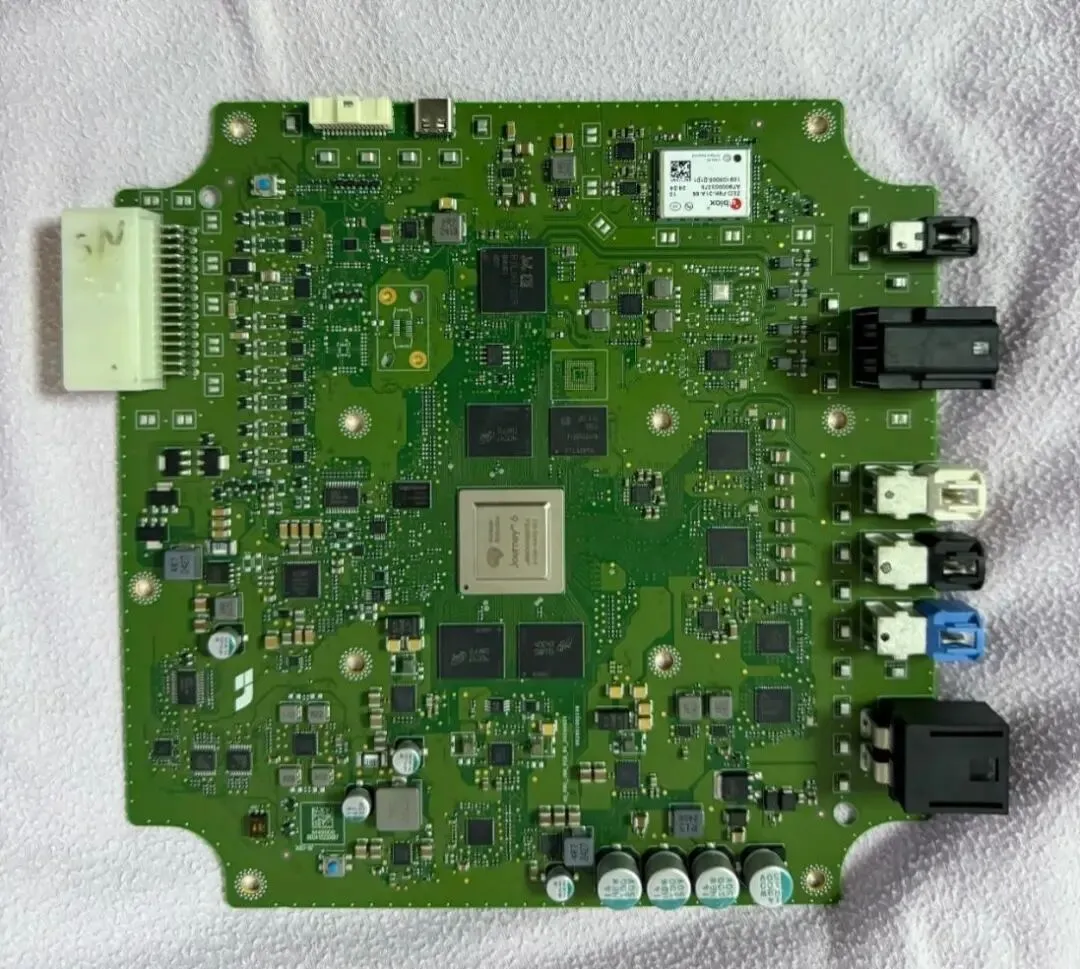
▲上图是使用地平线J6M的AD Pro,从标签无法判断是哪家公司生产的
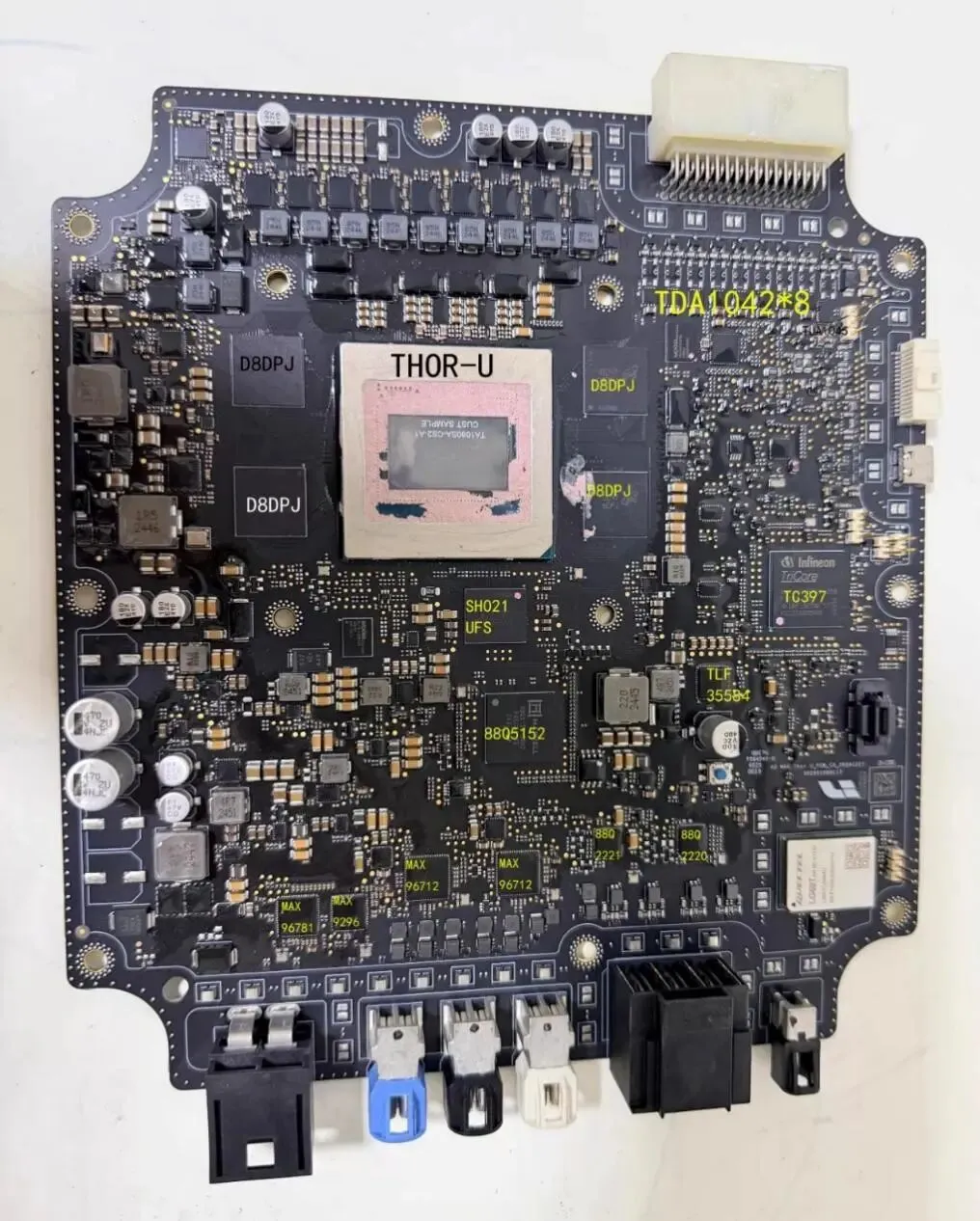
AD MAX有两个版本,上图是早期版本,使用Thor-U,上标注CUST SAMPLE,订做样品,后来改为工程版,而未来部分高端车型将用理想自研的马赫M100来取代Thor-U,早期版本使用移远通信的LG69T模块,后来用u-blox的ZED-F9K代替。
AD Pro的PCB板
图片来源:网络
AD MAX使用4片美光的D8DPJ,型号为MT62F2G64D8EK-023 FAAT:C,是16GB的LPDDR5X,8533MTPS,441 Balls,AD Pro则大大缩水,使用3片美光的D8FFD,型号为MT62F1536M32D4DS-023 AAT:C D8FFD,是6GB的LPDDR5X,7500MTPS,3片合计不过18GB,而AD MAX高达64GB,速率也不如AD MAX。UFS方面,AD MAX使用一片美光的SH021,型号MTFC256GBCAVTC,容量256GB,AD Pro使用三星的UFS,容量只有64GB。
AD MAX里的串行NOR Flash有两片,都是中国台湾旺宏的,估计容量为512Mb,AD Pro是兆易创新的,也是两片,一片很小,只有16Mb,一片较大,有512Mb。串行NOR Flash在汽车电子启动中主要用于存储Bootloader和应用程序,通过FlexSPI接口实现XIP(就地执行)模式。核心启动流程包括:芯片上电由BootROM初始化FlexSPI、进行Flash探测/自动配置(如QPI/OPI模式切换),随后直接从Flash地址映射空间读取代码执行,无需将代码拷贝到内部RAM即可运行,满足即时启动需求。
对于需要OTA更新的汽车应用,支持两个Image(image L/H)的冗余启动,如果优先启动的Image损坏,BootROM会自动尝试启动备用Image。还支持启动冗余与软复位:针对冷/热启动需求,支持RESET#硬复位引脚或软件复位命令(SW Reset)来清除Flash的Continuous read模式,保证热复位时Flash能正确重新初始化。
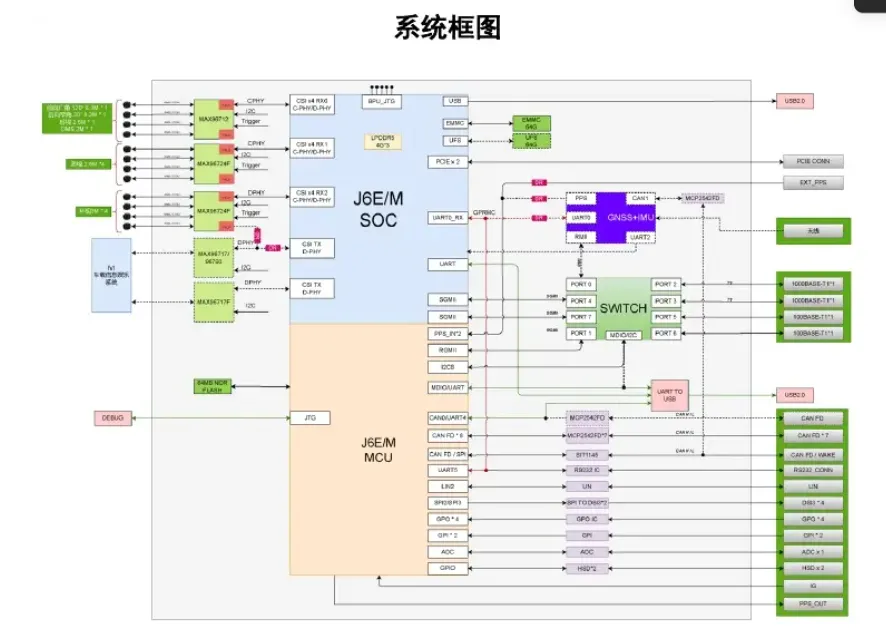
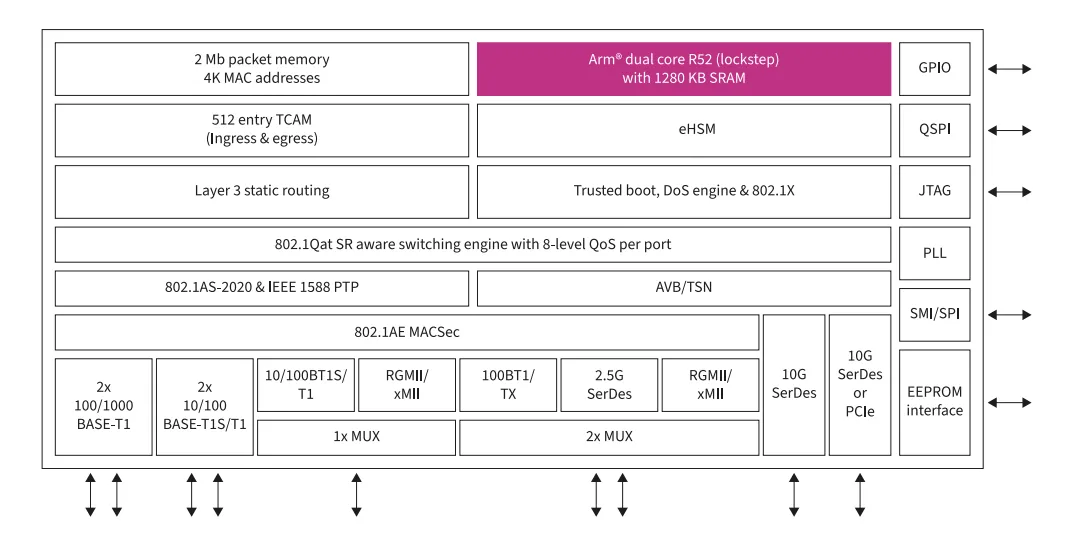
地平线J6E/J6M系统框架图
图片来源:网络
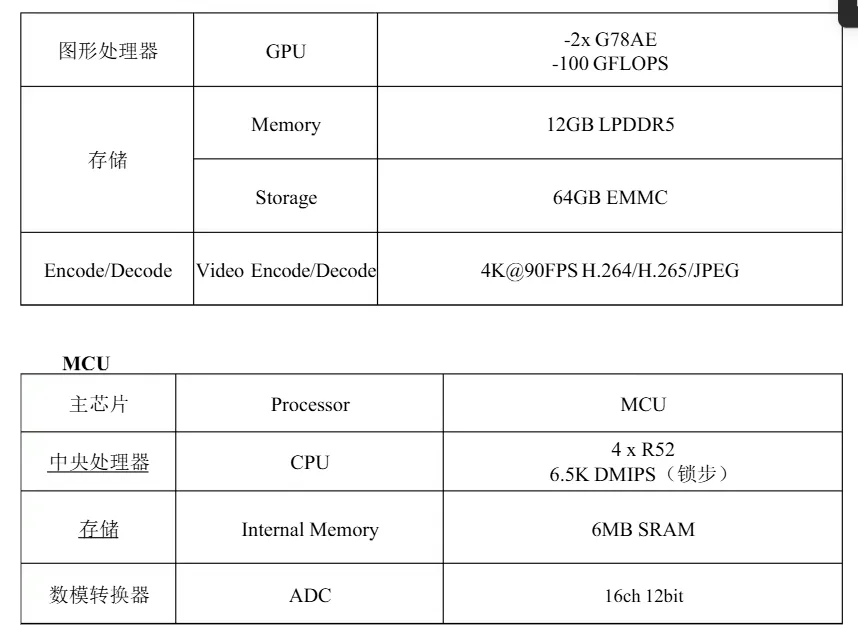
地平线J6E/J6M系统框架图,可见有MCU部分
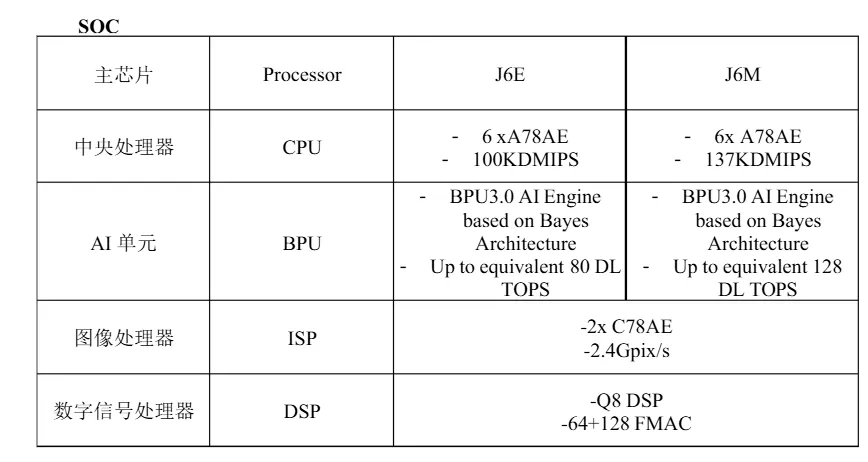
地平线J6E/J6M简介
图片来源:网络
AD MAX与AD Pro有一个非常大的差别就是AD MAX有独立的MCU,AD Pro可能使用了地平线J6M内部的安全岛MCU。AD MAX使用传统的英飞凌SAK-TC397XX-256F300S BD,万片起单价约35-40美元,千片起单价约50-55美元,可谓非常昂贵,AD Pro大胆放弃了独立MCU,大幅度节约成本。
SAK-TC397XX-256F300S BD是PG-LFBGA-292封装,自动驾驶专用,ASIL-D级,SIL-3级安全。可编程Flash容量达16MB,SRAM达6.9MB,性能强悍,支持12CAN、12LIN。TC397有专用的PMIC,即TLF35584,保证系统达到ASIL-D级。J6M也有一颗NXP的PMIC。
以太网方面,AD MAX使用英飞凌(原Marvell)的88Q5152交换机,这是一个9口交换机。
88Q5152内部框架图
图片来源:英飞凌
AD MAX增加了两个以太网物理层收发器,型号分别是88Q2221和88Q2220,两个都是千兆,推测一个是对应激光雷达,一个是对应4D毫米波雷达。
AD Pro则使用中国台湾瑞昱的RTL9071LQ做以太网交换机,还有一片瑞昱的RTL9010A千兆以太网物理层收发器,比AD MAX少一片。
AD MAX的主要接口

图片来源:网络
视频输入方面,AD MAX和AD Pro相差不大,都使用一片ADI的MAX9296对应前方两个800万像素输入,两片MAX96712对应四个侧视800万像素,一个MAX96781加串行将视频输出。
MAX96712是ADI的GMSL2代产品,每个链路在正向方向上以3Gbps或6Gbps的固定速率工作。可以接入4个400万像素摄像头。属于比较老旧的产品,目前大多使用MAX96724代替MAX96712。MAX96712接两个800万像素摄像头是有些勉强的,几乎榨干了MAX96712的性能,没有一点余量,帧率要略低于30Hz才比较保险,调试也很麻烦。当然MAX96712接4个200万像素是游刃有余的,好处是MAX96712足够便宜。
MAX9296比MAX96712略微好一点点,对于比较关键的前双目800万像素,理想还是采用MAX9296。比较稳妥的设计是使用GMSL3代产品MAX96792,最高支持12Gbps,接两个800万像素摄像头是绰绰有余,可以接两个1500万像素摄像头,当然价格要贵得多,小米汽车“YU7”就采用3颗MAX96792解串芯片,实现前视、侧视和环视摄像头数据汇聚。不过MAX96792的价格是MAX96712的两倍还多一点。
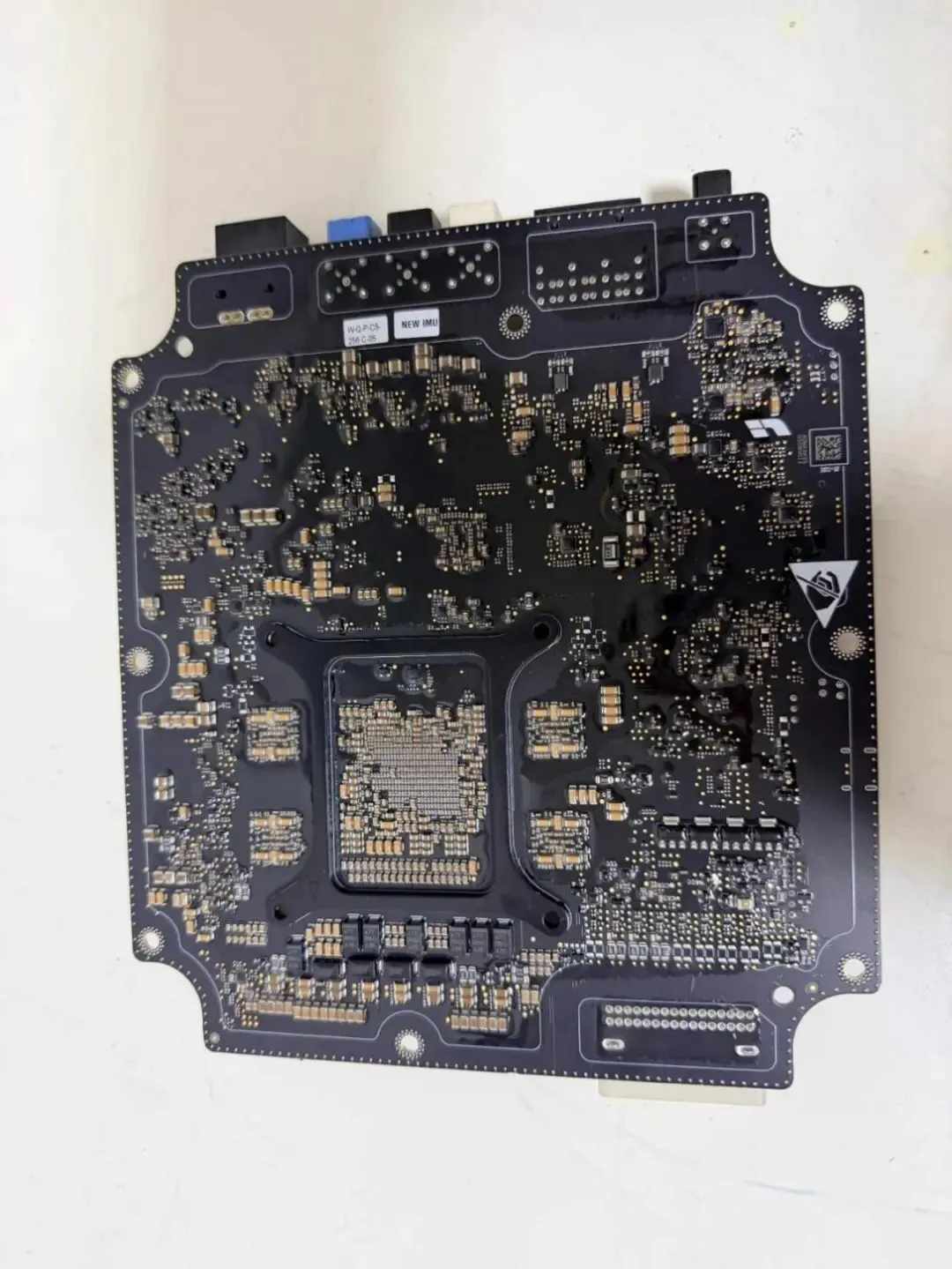
AD MAX PCB背面
图片来源:网络
AD MAX PCB背面,加了导远的IMU,AD Pro也是如此,高精度定位离不开独立IMU。
大部分厂家将360环视交给自动驾驶域控制器负责,如华为全系列,有些还加上DMS和正后影像,这样可以减轻座舱域控制器的压力,但理想不这么做,自动驾驶仅仅负责这6颗摄像头。其余如360环视、DMS、OMS、正后影像、行车记录仪等等都交给座舱域控制器,同样采用Thor-U的领克900也是这样设计。
AD MAX的成本可能比AD Pro要高五千元左右,即便是AD MAX,理想也是拼命节约成本,理想的成本控制能力令人叹为观止。
免责说明:本文观点和数据仅供参考,和实际情况可能存在偏差。本文不构成投资建议,文中所有观点、数据仅代表笔者立场,不具有任何指导、投资和决策意见。
更多报告
| AI机器人 | ||
AI机器人 | ||
| 云端和AI | ||
| 车云 | ||
| 动力层 | ||
| 动力 | 混合动力报告 | |
| 800-1000V高压平台 | 电驱动与动力域研究 | |
热管理 | ||
其他 |
| 电子电气架构层 | ||
| E/E架构框架 | E/E架构 | 汽车电子代工 |
| 48V低压供电网络 | ||
| 智驾域 | 自动驾驶SoC | |
| 座舱域 | 座舱域控 | |
| 车控域 | 车身(区)域控研究 | |
| 通信/网络域 | ||
| 跨域融合 | ||
| 其他芯片 | ||
| 车载存储芯片 |
| 智舱系统集成和应用层 | ||
智能座舱应用框架 | 座舱设计趋势 | |
自动驾驶算法和系统 |
| OS和支撑层 | ||
| SDV框架 | SDV:软件定义汽车 | |
信息安全/功能安全 |
| 其他宏观 | ||
| 车型平台 | 车企模块化平台 | |
| 政策、标准、准入 | 智能辅助驾驶法规和汽车出海 |
「AI与机器人月报」
「联系方式」
手机号同微信号
产业研究部丨赵先生 18702148304
推广传播部|杜先生 13910162318
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 沃尔沃ES90官图曝光:想买纯电旗舰轿车的人,最该先问自己一个问题
- 9万起,这台丰田小型SUV真能“比宝马X1还漂亮”?
- 20万,买一台比牧马人还吸睛的硬派SUV?我认真聊聊坦克300
- 奇瑞瑞虎8L|大空间家用SUV,一步到位的高性价比之选
- 汽车圈关注:藏不住了!小米全新增程SUV或将命名“小米寻天N90”
- 双龙Torres:9.85万硬派SUV看着很香,但想拿它当家用唯一车的人先别急
- 30万内,这4台增程SUV长途无焦虑
- 2026款宝马iX3亮相:想买豪华纯电SUV的人,最该先冷静这件事
- 领克全新SUV官图发布!取消"Z"字标识,全新设计+智驾升级,三季度上市.
- 10-20万,比亚迪值得入手的几款纯电SUV,空间大质量可靠
