毋庸置疑,自动驾驶的终极答案是Robotaxi。2025年6月,Waymo和Tesla先后在德克萨斯州奥斯汀上线商业Robotaxi服务。两个技术路线第一次在同一座城市、同一时间维度上正面竞争。
这是理解当前自动驾驶格局最好的切片。
Waymo:传感器融合的防御战
Waymo于2025年3月在Austin上线,是当地首个L4商业运营。
维度 | Waymo方案 |
|---|
硬件方案 | 激光雷达+摄像头+毫米波雷达三重冗余,感知有物理下限保障 |
ODD管控 | 从地理围栏起步,数据验证后才逐步扩展,每步扩张均有量化安全指标门槛 |
运营积累 | 旧金山、凤凰城已有大规模运营记录,安全、可靠性、乘客满意度均优于传统网约车 |
核心结论:Waymo代表成熟、稳健、可量产的L4路线。代价是硬件成本高出特斯拉一个数量级,扩张速度受限于成本约束。
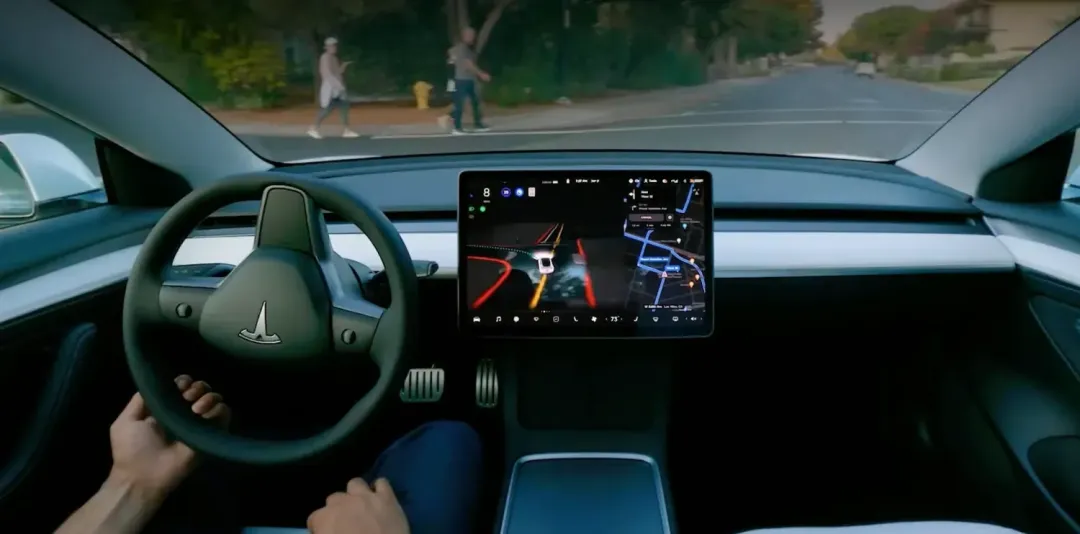
Tesla:纯视觉的首秀
Tesla于2025年6月在Austin启动Robotaxi试点,采用纯视觉+端到端FSD方案,初期配备安全员。
维度 | Tesla方案 |
|---|
传感器 | 零激光雷达,仅靠摄像头+毫米波雷达,硬件成本大幅低于Waymo |
安全机制 | 远程监控+干预,后台操作员可实时监控并必要时介入(非Waymo那种完全无人值守模式) |
迭代速度 | 同日发布的FSD V13已在Austin部署,模型能力随OTA快速提升 |
核心结论: Tesla的目标不是做一个比Waymo更安全的Robotaxi,而是证明纯视觉+数据驱动的路线可以Scale——硬件成本低、复制速度快,这是Waymo路线无法比拟的优势。
两种路线的根本分歧
维度 | Waymo | Tesla |
|---|
传感器 | 激光雷达+摄像头+雷达 | 仅摄像头(+毫米波) |
安全架构 | 传感器冗余兜底感知下限 | 数据规模提升感知上限 |
扩张逻辑 | ODD验证→逐步扩展 | 软件定义,硬件一致 |
当前挑战 | 成本过高,扩张速度慢 | 证明纯视觉安全性仍需时间 |
两者共同面对的问题:极端天气、异常交通行为、公众接受度。但Tesla的商业压力更小——FSD Supervised(L2++)已经大规模商用,Robotaxi只是能力溢出;Waymo则必须在L4维度上证明自己。












 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
