自动驾驶汽车怎么避开行人和车辆?先别把它想得太神
自动驾驶汽车最容易让人误会的地方,是它看起来像“车自己会开”。但真正买车、用车时,普通人要先想清楚一件事:它不是凭感觉在路上跑,而是靠传感器、算法和大量数据不断判断周围环境。它能帮你减轻一部分驾驶负担,但不能替代驾驶员注意力。
说白了,车要想避开车辆和行人,第一步不是“会开”,而是先得“看懂路上有什么”。
它的第一双眼睛,是摄像头
最早的思路很直接:人开车靠眼睛看路,那就给车装摄像头。
摄像头的优势很明显,它能看到颜色、车道线、红绿灯、行人轮廓、车辆外形。比如前方是车、是人、是锥桶,摄像头最适合做这类识别。
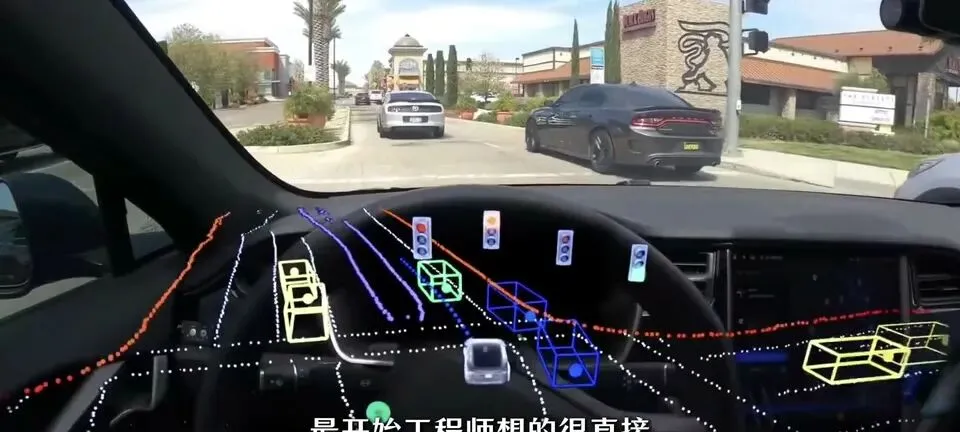 自动驾驶汽车内部视角,识别周围车辆
自动驾驶汽车内部视角,识别周围车辆
但问题也在这里。
人看到模糊画面时,大脑会自动补全信息。远处一个人影、雨里一辆车、逆光下的路牌,人类驾驶员往往能结合经验判断。但对AI来说,画面本质上是一堆像素点。它必须通过大量标注图片学习:什么样的轮廓像车,什么样的姿态像行人,什么样的区域可能是路面。
这就是为什么自动驾驶技术背后离不开数据训练。车不是天生认识世界,而是被一遍遍“喂”出来的。
不过,摄像头有一个天然短板:它看得见“是什么”,但对“有多远”这件事,并不总是那么稳。尤其在雨雪、雾天、强逆光、夜间复杂光源下,视觉系统的判断难度会明显增加。
激光雷达解决的是“距离感”
开车不是只要知道前方有个东西,还要知道它离你多远、相对速度如何、是不是会进入你的行驶轨迹。
这时候,激光雷达就派上用场了。
它的工作方式可以理解为:向周围发射激光束,再根据反射回来的时间计算距离。这样一来,车辆周围会被扫描成一张密密麻麻的三维点云图。车不只是“看到”前方有东西,还能知道这个东西大概处在什么位置。
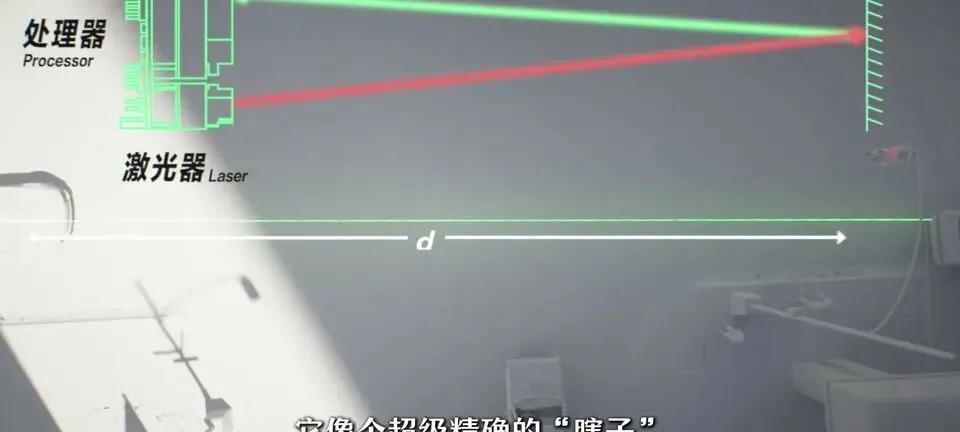 激光雷达系统工作原理展示
激光雷达系统工作原理展示
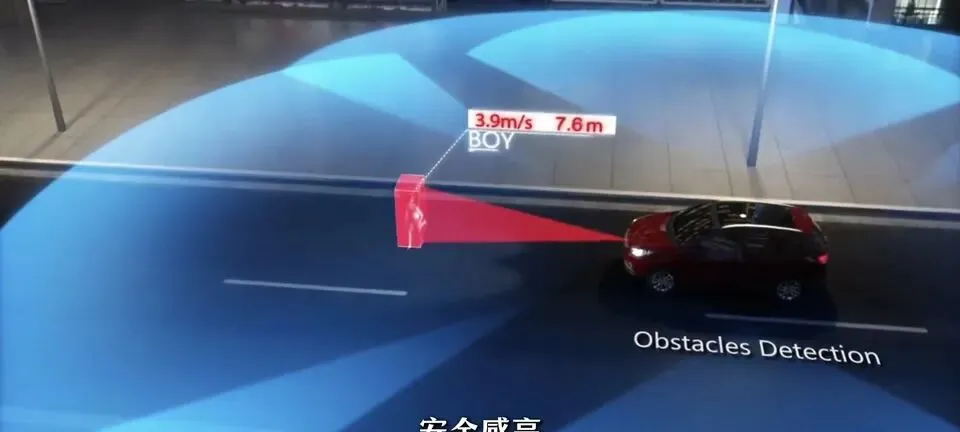
这对车辆避障很关键。比如前方突然出现静止车辆、路边有行人靠近、道路边缘有障碍物,距离判断越准确,系统越有机会提前减速或规避。
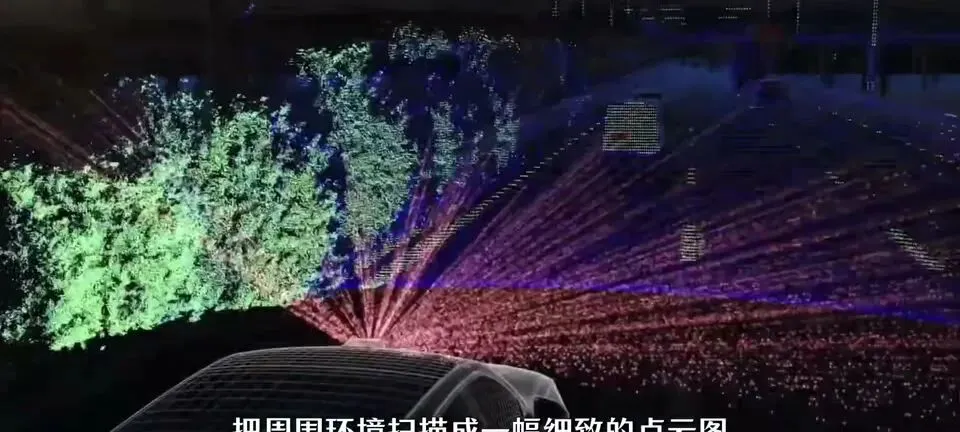 激光雷达扫描周围环境形成点云图
激光雷达扫描周围环境形成点云图
但激光雷达也不是万能的。
它擅长测距离、建空间,却不一定擅长判断“这到底是什么”。一个立在路边的物体,它能测出形状和位置,但这个物体是行人、栏杆、纸箱,还是某种特殊障碍,还需要和摄像头、毫米波雷达等信息一起判断。
所以现在很多方案都强调多传感器融合,本质就是让摄像头负责识别,让雷达负责测距,让不同传感器互相补位。
真正难的,是传感器之间意见不一致
听起来,摄像头加激光雷达就很稳了。但实际路况没这么简单。
摄像头可能觉得前面只是阴影,雷达却感知到有障碍物;摄像头看到路面标线,雷达却受到了周围复杂反射干扰。系统到底听谁的?如果过于保守,可能出现莫名减速;如果过于激进,又可能漏掉风险。
 摄像头和激光雷达融合展示
摄像头和激光雷达融合展示
这就是很多人体验辅助驾驶时会遇到的分歧点:有些系统开起来很谨慎,有些系统看起来更顺,但普通用户真正关心的是,它在复杂场景里是否稳定、是否容易理解、是否会让驾驶员紧张。
自动驾驶技术最怕的不是传感器少一个,而是系统在复杂场景里判断不稳。
比如城市路口、加塞车辆、行人横穿、非机动车贴边行驶、施工改道,这些场景不像高速巡航那么规整。系统要处理的不是单一物体,而是一堆不断变化的关系。
从“死记规则”到“理解全局”
早期的决策系统,很像工程师提前写好的规则题库:如果前方有车,就减速;如果车道线清晰,就保持车道;如果距离过近,就制动。
这种方式在规则清楚的场景里可以工作,但遇到复杂情况就容易僵硬。
比如旁边车辆突然加塞,前方行人站在路边犹豫不动,非机动车忽快忽慢,这些情况很难靠简单规则穷举。真实道路不是考试题,答案经常不标准。
 自动驾驶汽车的决策系统展示
自动驾驶汽车的决策系统展示
后来,技术路线开始转向更强的AI模型。像Transformer这类模型,核心价值在于能更好地理解全局关系,而不是只盯着单个物体。车辆不再只是识别“前方有车”,还要理解这辆车和车道、行人、红绿灯、旁车之间的关系。
鸟瞰图技术也是这个思路。它会把摄像头、雷达等信息融合成类似俯视视角的空间图,让系统更清楚地知道周围哪里能走、哪里不能走、哪里存在潜在风险。
 自动驾驶汽车的鸟瞰图技术展示
自动驾驶汽车的鸟瞰图技术展示
对普通驾驶者来说,这些技术名词不必背。你只要理解一点:车不是单纯识别一个人、一辆车,而是在不断判断“这个空间能不能安全通过”。
占用网格:不纠结它是什么,先判断能不能碰
自动驾驶里有一个很实用的思路,叫占用网格。
它不一定非要把每个物体都精确命名,而是把周围空间划成一个个格子,然后判断这些格子有没有被占用。
这听起来没那么炫,但对安全很重要。因为路上会出现很多系统未必熟悉的东西:掉落物、异形障碍、临时施工设备、奇怪形状的货物。如果系统只会识别“车、人、锥桶”,那遇到没见过的东西就可能犯难。
占用网格的价值在于:不管那是什么,只要这个空间被占了,车就应该避开。
这也是自动驾驶避障能力提升的关键方向之一。它不追求每一次都像人一样给物体起名字,而是先保证路径判断更稳。
端到端大模型,让车从人类驾驶数据里学规律
现在行业里讨论很多的端到端大模型,思路又往前走了一步。
传统方式是工程师拆成很多环节:感知、预测、规划、控制,每一步都有人设规则。端到端则更像让系统看大量人类驾驶视频和传感器数据,自己总结从环境输入到驾驶动作之间的规律。
 端到端大模型展示
端到端大模型展示
这种方式的吸引力在于,它可能让车辆在复杂场景中表现得更自然,不再那么机械。但它也带来一个现实问题:模型越复杂,普通用户越难理解它为什么这样开。
这不是说端到端不好,而是提醒大家,买车时别只听“模型更大、算力更高、能力更强”这类说法。真正重要的是,你实际开车时能不能信任它的行为逻辑,它的提醒是否清楚,接管是否顺畅,遇到复杂路况时会不会让你摸不着头脑。
辅助驾驶只能减轻部分驾驶负担,不能替代驾驶员注意力。这个底线不能模糊。
纯视觉和多传感器融合,到底该信谁?
现在行业里大致有两种路线。
一种是纯视觉路线,主要依靠摄像头和强算法来理解世界。它的好处是硬件成本更低,路线更接近人类驾驶方式。如果算法足够强,理论上能覆盖很多日常场景。
 纯视觉自动驾驶系统展示
纯视觉自动驾驶系统展示
但纯视觉路线的争议也很明确:雨雾、强逆光、夜间复杂光源、脏污遮挡,都会增加摄像头识别难度。算法可以补,但物理限制不能完全忽略。
另一种是多传感器融合路线,把摄像头、激光雷达等设备结合起来。它的优势是信息来源更多,空间感知更扎实,给人的安全感更强。
 激光雷达等多传感器融合展示
激光雷达等多传感器融合展示
代价也很直接:硬件更多,成本更高,系统融合难度更大。传感器越多,并不自动等于体验越好,关键还得看算法如何处理这些信息。
所以这个问题没有简单答案。纯视觉不是低级,多传感器也不是天然稳。真正该比较的不是路线口号,而是具体车型在你常跑道路上的表现。
买车时别只看“有没有”,要看“好不好用”
对普通消费者来说,自动驾驶相关配置最容易让人上头。
销售讲得很热闹,屏幕演示很漂亮,车机界面看起来也很有科技感。但你买回去以后,真正使用的场景往往很普通:早晚高峰跟车、高速巡航、环路变道、地库进出、雨天通勤、夜间回家。
这些场景里,功能多不一定最重要。更重要的是系统是否稳定、提醒是否清楚、驾驶员是否容易接管、车辆动作是否自然。
如果你是新手司机,别把辅助驾驶当成“安全兜底”。它可以帮你减轻疲劳,但不能替你判断所有风险。新手更应该关注视野、车身尺寸、停车便利性、基础安全配置和接管逻辑。
如果你经常跑高速,高阶辅助驾驶的价值会更明显,但也要重点体验跟车、变道、上下匝道时是否符合你的驾驶习惯。
如果你主要在城市拥堵路况开车,那就别只看宣传里的演示路线。城市路况变量太多,非机动车、行人、临停车辆和施工区域都会影响体验。
最该想清楚的保留意见:它不是万能答案
自动驾驶技术发展很快,但消费者买车不能只买想象。
当前很多量产车提供的是辅助驾驶能力,不等于车辆可以完全替你开。它需要驾驶员持续关注路况,并随时准备接管。这个边界说得越清楚,对用户越负责。
还有一个容易忽略的问题:自动驾驶体验很依赖使用环境。同一套系统,在车道线清晰、交通秩序较好的道路上,可能表现很顺;到了雨雾天气、施工改道、复杂路口,体验就可能打折。
所以买车时不要只问“有没有激光雷达”“是不是端到端”“是不是纯视觉”。更应该问:
你常跑的路,它能不能稳定使用?
遇到复杂场景时,它怎么提醒你?
退出和接管是否清楚?
雨天、夜间、地库、匝道这些场景,厂家是否给出了清晰边界?
这些问题比单纯追配置更重要。
自动驾驶汽车适合谁,不适合谁?
如果你经常跑高速或城市快速路,通勤距离长,愿意学习系统逻辑,也能接受辅助驾驶有边界,那么搭载成熟辅助驾驶能力的车型,确实值得放进备选。
如果你买车主要是短途代步,路线简单,预算又卡得很紧,那没必要为了某个高阶功能硬上高配。配置越多不代表越适合你,钱应该先花在安全、空间、补能或用车成本这些高频需求上。
如果你对新技术有兴趣,但又很在意长期稳定性,那就别只看发布会演示。最好到店试驾,重点体验你最常跑的路况,尤其是跟车、变道、路口处理、接管提醒这些细节。
如果你希望车能完全替你开,那现在更要冷静。量产车上的辅助驾驶不是“司机替身”,驾驶员仍然是责任主体。
现在买不买,关键不在于这项技术听起来多先进,而在于它是否能在你的真实用车场景里稳定、清楚、可控地帮上忙。
纯视觉派和多传感器融合派,你可以有偏好,但别只为路线站队。买车时真正要看的,是这套系统在你每天的路上,是减轻负担,还是增加紧张感。对于普通人来说,这才是自动驾驶技术最现实的价值。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
