自动驾驶车辆在复杂路况下的决策难题,一直是行业攻关的核心。面对其他车辆行为的不确定性,传统规划算法要么过度保守导致通行效率低下,要么决策失误引发安全风险。近期一篇发表于IROS 2025的研究论文,提出了一套融合多模态预测与主动探测的运动规划框架,让智能车能主动"探知"周边车辆意图,在安全与效率之间找到最优解。
论文信息
题目: Active Probing with Multimodal Predictions for Motion Planning
基于多模态预测主动探测的运动规划方法
作者:Darshan Gadginmath, Farhad Nawaz, Minjun Sung, Faizan M Tariq, Sangjae Bae, David Isele, Fabio Pasqualetti, Jovin D’sa
一、核心痛点:预测模糊让自动驾驶"举棋不定"
当下的自动驾驶轨迹预测模型,即便用上Transformer、图神经网络等先进架构,仍摆脱不了数据局限。Waymo、NuScenes这类主流数据集,难以覆盖所有人类驾驶风格;传感器质量波动,又会额外增加预测不确定性。
就像下图(图1)展示的场景:红色自车计划并入右侧车道,黄色车辆周边的彩色椭球体,代表其他车辆轨迹的多模态预测结果。当预测模型给车辆1的多条轨迹分配相近概率时,自车若一味保守等待,可能造成交通拥堵;可贸然并线,又有碰撞风险。
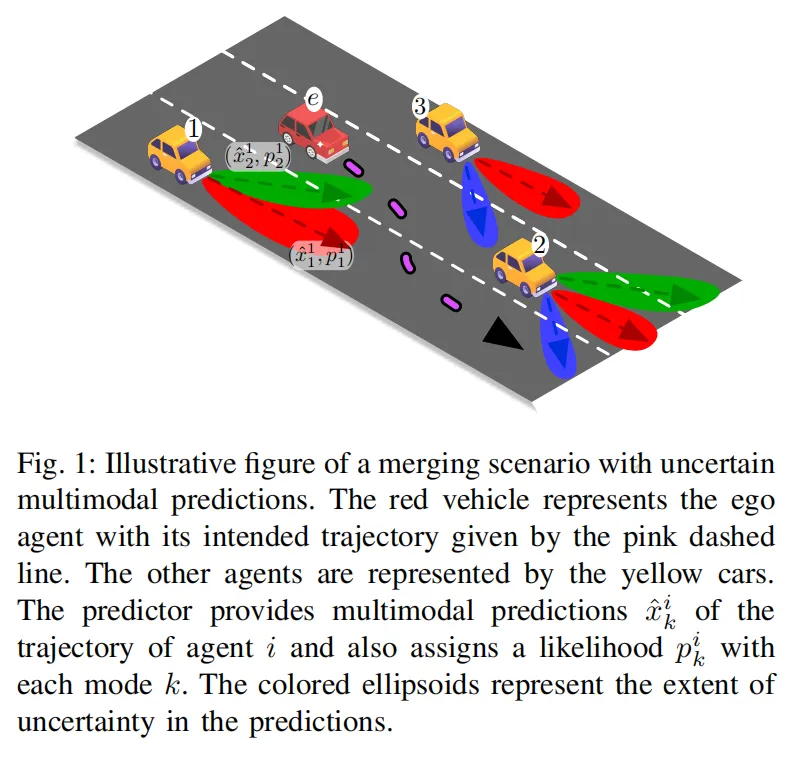 图1
图1被动等待的策略,只会让自车频繁刹车、加速,既影响通行效率,也降低乘坐体验。而这篇论文的核心思路,就是让自车主动采取策略性动作,比如小幅加速或微调方向,促使周边车辆暴露行驶意图——攻击性驾驶员可能保持车速,防御性驾驶员大概率会让行。通过这类交互,自车能快速掌握关键信息,做出更精准的轨迹规划。
二、方法总览:三位一体的主动探测规划框架
这篇论文构建的框架,把轨迹规划、多模态预测、在线行为推理整合为一体,核心分为三个核心模块:效用最大化、基于风险评估的安全性保障、主动探测的行为推断。整个框架以模型预测控制的方式运行,每一时间步都重新规划轨迹,确保决策的实时性与适应性。
(注:此处需补充方法总体结构图,因原文未直接提供,可基于论文逻辑描述+示意:框架输入为自车与周边智能体的状态、多模态预测轨迹;第一层是效用计算,锚定参考轨迹优化驾驶舒适性与效率;第二层是风险评估,量化多模态预测下的碰撞风险;第三层是主动探测,通过策略动作更新对周边车辆行为参数的估计;最终输出最优控制序列,指导自车行驶。)
三、关键创新:从风险度量到主动探测的层层突破
1. 更精准的风险度量:不只是算距离,更要量化不确定性
传统风险评估常聚焦极端情况,却忽略了多模态预测的分布特性。这篇研究提出的风险度量方法,结合了高斯混合模型与Wasserstein距离,能精准捕捉自车与周边车辆轨迹分布的差异。
如下图(图2)所示,场景中有两辆周边车辆:智能体1有3条预测轨迹(红、黑、绿),智能体2有2条预测轨迹(紫、青)。图2(b)清晰展示了不同时间点各轨迹的风险值——智能体1中与自车轨迹重叠的红色轨迹风险最高,智能体2中与自车平行的紫色轨迹,全程保持高风险,而偏离自车的青色轨迹风险随时间降低。
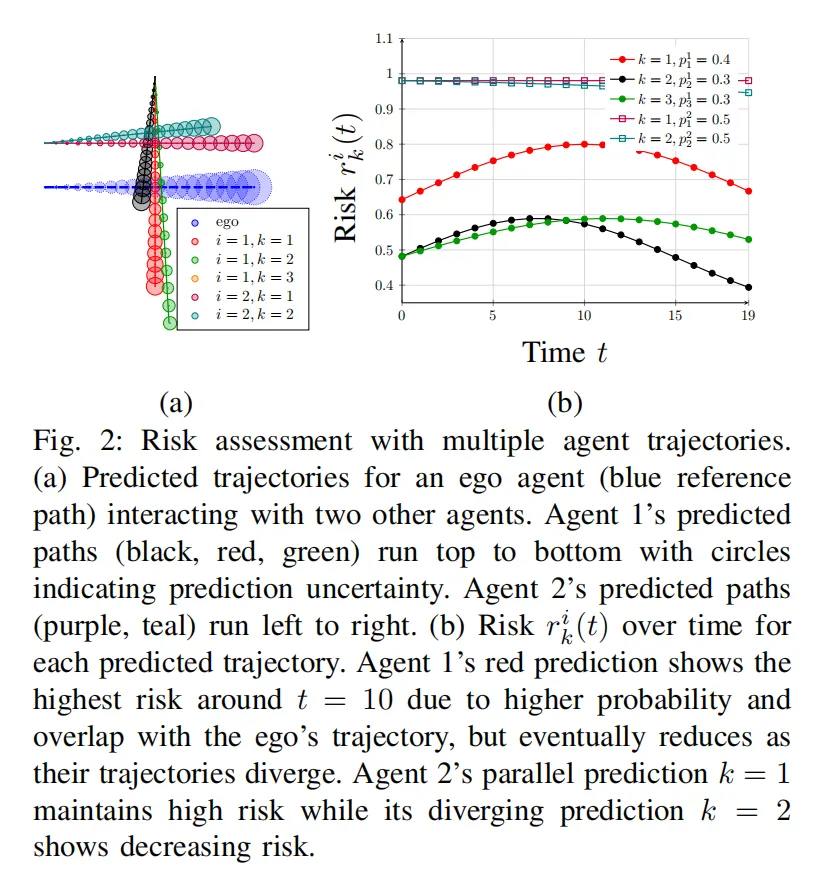 图2
图2这个风险度量的优势在于,既考虑了轨迹位置的远近,也纳入了预测的不确定性。比如对不确定性高的轨迹,会要求自车保持更大安全距离;且该方法能通过闭式解计算,保证了实时性,不会给算力带来额外负担。
2. 更智能的主动探测:不盲目试探,只在安全范围内"套信息"
主动探测的核心,是让自车通过动作获取周边车辆的行为参数。研究团队改进了玻尔兹曼决策模型,把自车动作对周边车辆奖励函数的影响纳入考量——周边车辆的轨迹概率,会随自车动作带来的交互结果变化。
具体来说,自车会先对周边车辆的行为参数(比如是否激进、是否倾向让行)做初始猜测,构建信念分布。之后通过贝叶斯规则,结合交互结果更新这个分布;再通过KL散度量化信息增益,判断探测动作是否有效。
值得注意的是,这套探测机制有严格的安全阈值:若某条预测轨迹的风险值超过设定阈值,自车会立刻停止对该轨迹的探测,避免为了获取信息而冒碰撞风险。这种设计,让主动探测始终在安全边界内进行,既保证了探知效率,又守住了安全底线。
3. 更高效的优化目标:平衡效用、安全与信息增益
整个框架的优化目标,同时兼顾三类需求:一是跟踪参考轨迹,保证驾驶效率与舒适性;二是最大化期望安全奖励,降低碰撞概率;三是最大化行为参数的信息增益,提升后续决策的精准度。
通过调整三类目标的权重,框架能适配不同场景——比如拥堵路段侧重效率,学校周边侧重安全,陌生路段侧重信息收集。这种灵活的权重设计,让算法能应对复杂多变的真实路况。
四、实验验证:在MetaDrive中跑出来的硬实力
研究团队在MetaDrive仿真环境中,针对并线和无信号十字路口两大高难度场景,对算法进行了全面验证。
1. 变道场景:精准识别驾驶风格,灵活调整并线策略
在有3辆交互车辆的并线场景中,算法展现出极强的行为识别能力:
- 当目标车道最后一辆车是防御性风格时,自车能探测到其让行倾向,安全并入该车前方;
- 当中间车辆偏向防御、其余车辆激进时,算法能精准捕捉这一特征,利用间隙完成并线;
- 当所有车辆都呈攻击性时,算法会选择保守策略,在最后一辆车后方安全并线。
即便面对时变行为的车辆(比如前2秒防御、后切换为激进),算法也能通过粒子滤波器,延迟极小地检测到行为变化,及时调整并线策略。
200次蒙特卡洛模拟结果显示(表2),这套主动探测算法的并线成功率远超传统机会约束规划器,且并线时间更短;虽然加加速度略高,但整体通行效率与安全性的提升十分显著。
2. 十字路口场景:无信号也能安全高效通行
在有7辆由强化学习控制的车辆的无信号十字路口场景中(图6),算法的优势同样明显:
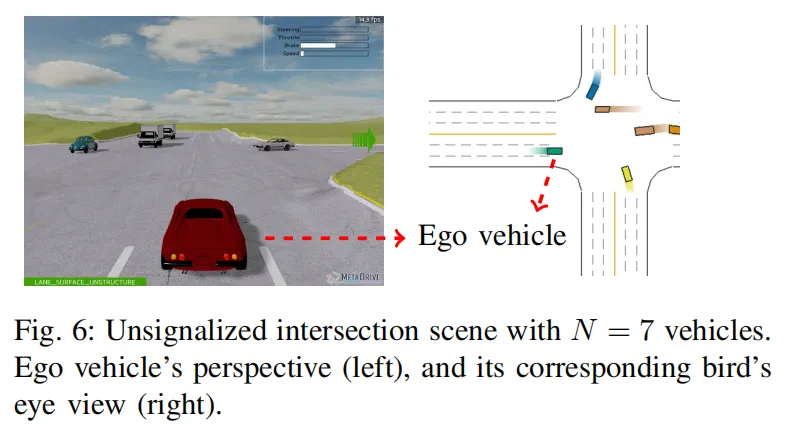 图6
图6200次模拟的统计结果(表3)显示,该算法的十字路口穿越成功率、无碰撞率均为最高,且穿越速度更快;即便与其他车辆的间隙更小,也能通过精准的风险控制,保证行驶安全,加加速度与传统算法持平,不会影响乘坐体验。
五、总结与展望:让自动驾驶更懂"社交"
这篇论文的核心价值,在于跳出了"被动预测"的思维定式,让自动驾驶车辆具备主动"探知"和"交互"的能力。通过统一的框架整合预测、风险评估与主动探测,既解决了多模态预测的不确定性难题,又提升了复杂场景下的决策效率与安全性。
当然,这项研究仍有拓展空间:比如构建更通用的行为模型,适配更多元的驾驶风格;优化计算流程,进一步降低算力消耗。但不可否认,这套主动探测的思路,为自动驾驶在复杂交通场景中的落地,提供了全新的解题思路——未来的智能车,不仅要能"看"懂路况,更要能"聊"懂路况,在与人类驾驶的交互中,实现更安全、更高效的通行。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
