可复现!自动驾驶BEV感知算法从原理到代码:BEVFormer、IPM、LSS、Occupancy...
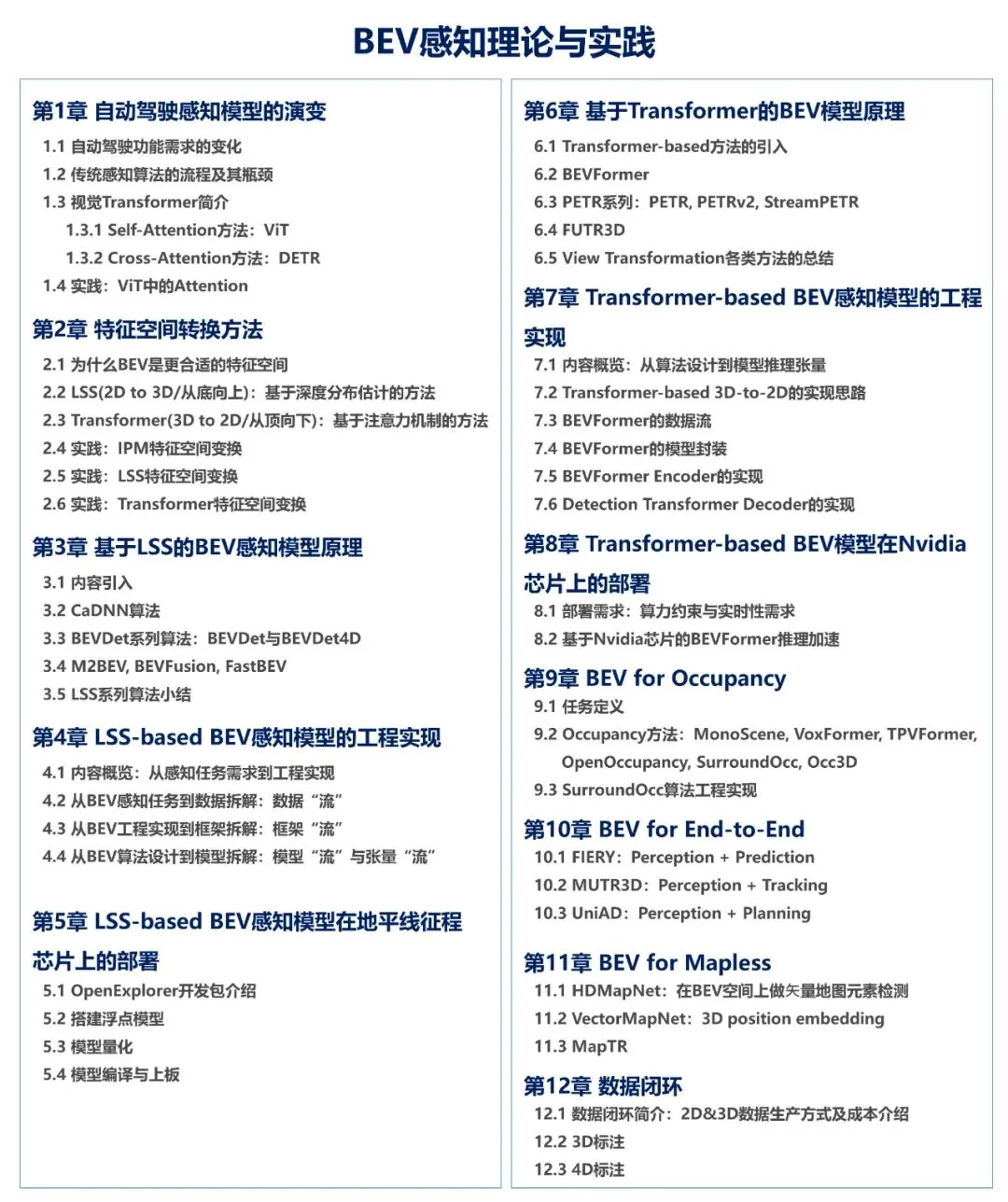
BEV感知方案于特斯拉、华为、小鹏等头部自动驾驶企业早已在23年量产落地。到26年,打开任何一家智驾公司的招聘页面,BEV都是高频词。但能搞定BEV感知实车部署的工程师,市场供需比失衡,仍被溢价争抢。BEV感知相当于给自动驾驶开启了“上帝视角”,能够让车辆无遮挡的“看清”道路上的实况信息。为什么突然成了标配?道理很简单。BEV本质上是一场从图像认知到世界建模的范式迁移,能够让传统image-view方案中的3D目标检测、障碍物实例分割、车道线分割、轨迹预测等各项感知和预测任务在一个算法框架下实现,将多模态数据统一整合到一个特征空间,降低系统复杂度。目前对BEV方案进行系统化梳理的教程依然较少,为了让同学们系统化地学习BEV感知的理论及其实践,深蓝学院联合业界资深工程师打磨推出了『BEV感知理论与实践』课程。
立即抢占学习名额
自动驾驶高级算法专家,历任百度自动驾驶高级研发工程师,纽劢科技L4部门研发负责人,商汤自动驾驶研发副总监。浙江大学控制系硕士,毕业至今拥有6年+的L4自动驾驶研发经验,擅长3D感知、定位建图和多传感器标定等技术。前小鹏汽车自动驾驶AI团队负责人,在职期间带领团队从零到一搭建了自动驾驶的BEV感知大模型XNet,也参与了中国最大的自动驾驶智算中心“扶摇”的搭建和维护。在XNet技术的驱动下,小鹏城区辅助驾驶XNGP已经在旗舰SUV G9和旗舰轿跑P7i上落地。Patrick本科毕业于北京大学物理学院,博士毕业于密歇根大学安娜堡分校(University of Michigan, Ann Arbor)。在加入小鹏之前,曾在硅谷和圣地亚哥的多家科技公司任职。1.掌握BEV感知的发展脉络:2D-to-3D方法以及3D-to-2D方法;2.熟悉BEV感知极具代表性的算法原理:BEVDet/BEVPoolv2/ BEVFusion/ BEVFormer;3.积累BEV实际落地过程中的经验:数据处理与推理加速。