各位同学,今天我们不谈枯燥的 Transformer 架构,也不聊复杂的损失函数。我们用一个贯穿始终的比喻,来理解当下人工智能领域最激动人心的三个方向:通用大模型、自动驾驶和具身智能。
如果把人工智能比作一个正在崛起的 "超级帝国",那么这三者的关系就像:
- 大模型是这个帝国的中央政府,拥有最强大脑,负责决策和统筹
- 自动驾驶是这个帝国的特种作战部队,是政府能力的最高阶体现,负责在最复杂的战场上执行任务
- 具身智能是这个帝国的产业工人,专精于特定领域的精细操作
今天,我们把所有的聚光灯,都对准这个 "特种作战部队"——自动驾驶。因为它不是大模型众多应用中普通的一个,而是大模型能力的终极考验,是连接数字大脑与物理世界的最后一公里,更是目前人类能构建的最复杂的多智能体实时博弈系统。
一、为什么说自动驾驶是大模型的 "高阶落地方案"?
最近全网都在谈AI Agent、Multi-Agent,AutoGPT 能自动帮你写周报、Manus 能自动帮你订酒店,一堆人惊呼 "哇!AI 终于会自己做事了!"
你以为 ChatGPT 能帮你写个 PPT、AutoGPT 能帮你查个资料,这就算 Agent 了?那都是新手村任务!这就像你玩游戏,刚出新手村打了个史莱姆,就以为自己通关了?
真正的地狱难度 Agent,那必须是自动驾驶!
很多人以为,自动驾驶和 ChatGPT、文心一言一样,只是大模型的一个普通应用。这不是低估,这是降维打击!
1. 大模型能力的 "金字塔":从 "纸上谈兵" 到 "生死决策"
大模型的能力可以分为三个层次,越往上难度呈指数级增长:
2. 自动驾驶对大模型提出了 "不可能三角" 要求
普通大模型应用只需要追求 "准确性",而自动驾驶必须同时满足三个相互矛盾的要求:
要求 | 含义 | 普通应用 | 自动驾驶 |
极致的实时性 | 决策延迟必须低于 100 毫秒 | 无所谓,慢几秒没人在意 | 必须!否则就会撞车 |
绝对的安全性 | 错误率必须低于百万分之一 | 说错话可以道歉 | 错一次就是人命关天 |
强大的泛化性 | 必须能应对所有从未见过的场景 | 常见场景够用就行 | 必须覆盖所有长尾场景 |
这就像要求一个特种兵同时具备 "闪电般的反应速度"、"钢铁般的纪律性" 和 "百科全书般的知识储备"。目前没有任何其他大模型应用需要同时满足这三个要求。
技术前沿:特斯拉 FSD v13 采用的端到端大模型架构,就是为了解决这个 "不可能三角"。它把原来分散的感知、预测、规划模块整合成一个单一的神经网络,直接从 8 个摄像头的输入,输出方向盘和油门刹车的控制信号,把系统延迟从原来的 300 毫秒降低到了 50 毫秒以内。
二、自动驾驶的本质:地狱级难度的 Multi-Agent 博弈系统
说到 Multi-Agent,现在网上更疯了!什么 "一个 AI 创业公司,就是 7 个 Agent 开公司,CEO、CTO、产品、运营、测试全齐了,不用发工资!" 一堆人看得热血沸腾,说这要颠覆资本主义了!
我每次看到这个都想扶额 —— 兄弟,你这 Multi-Agent,都是自己人啊!所有 Agent 都听你指挥,说往东绝不往西,说写代码绝不摸鱼,这叫什么 Multi-Agent?这叫过家家!
真正的地狱级 Multi-Agent,那必须是自动驾驶!
这是今天最重要的知识点。很多人以为自动驾驶就是 "一个大模型在开车",这是完全错误的。
现代自动驾驶系统,本质上是一个由数十个专业大模型组成的多智能体团队,它们不仅要毫秒级协同工作,还要和道路上数百个完全不可控的异质智能体,进行实时博弈!
这就不是什么 AI 创业公司开公司了,这是你带着一群队友,在一个全是野人的地图里打吃鸡!
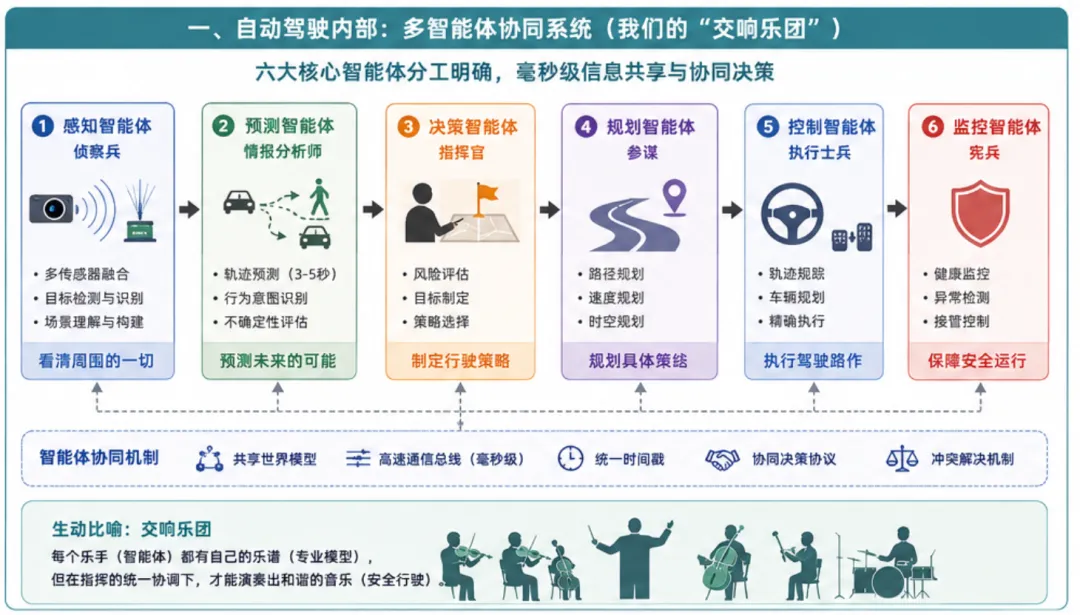
1. 系统内部:一个分工明确的 "多智能体指挥部"
让我们把一辆自动驾驶汽车比作一个前线作战指挥部,里面有多个各司其职的专家智能体:
2. 道路上的博弈:与数百个 "异质智能体" 的实时互动
更复杂的是,自动驾驶汽车不是在一个空无一人的道路上行驶。它需要与道路上的数百个异质智能体进行交互和博弈:
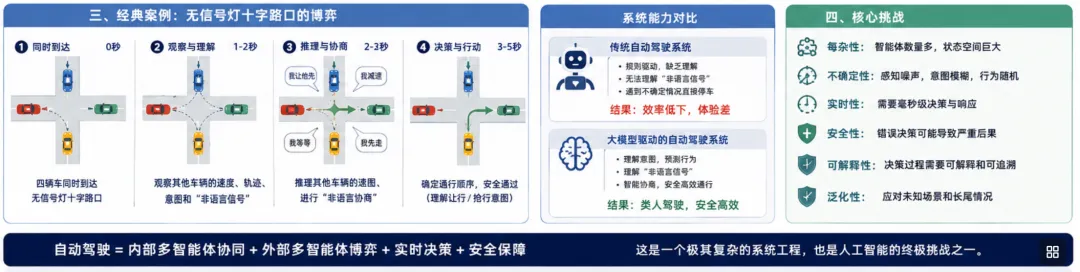
经典案例:在一个没有红绿灯的十字路口,四辆车同时到达。人类司机会通过眼神、手势、缓慢移动等方式进行协商,最终确定通行顺序。
以前的传统自动驾驶系统,遇到这种情况会直接停车,因为它不知道该谁先走。而现在的大模型驱动的自动驾驶系统,能理解这种 "非语言沟通"。它会观察其他车的速度变化,如果其他车都在减速,它就知道 "哦,他们让我先走";如果其他车在加速,它就知道 "哦,他们要抢行,我得让着点"。
技术前沿:Waymo 的多智能体模拟平台,可以同时模拟数万个智能体在一个城市中的交互行为。他们每天在虚拟世界中行驶数十亿公里,训练自动驾驶系统应对各种极端的博弈场景。比如,当一个醉酒的行人突然从路边冲出来,当一个路怒症司机连续别车三次,当救护车在后面鸣笛需要紧急避让...
三、自动驾驶:大模型执行工具的 "最后一公里"
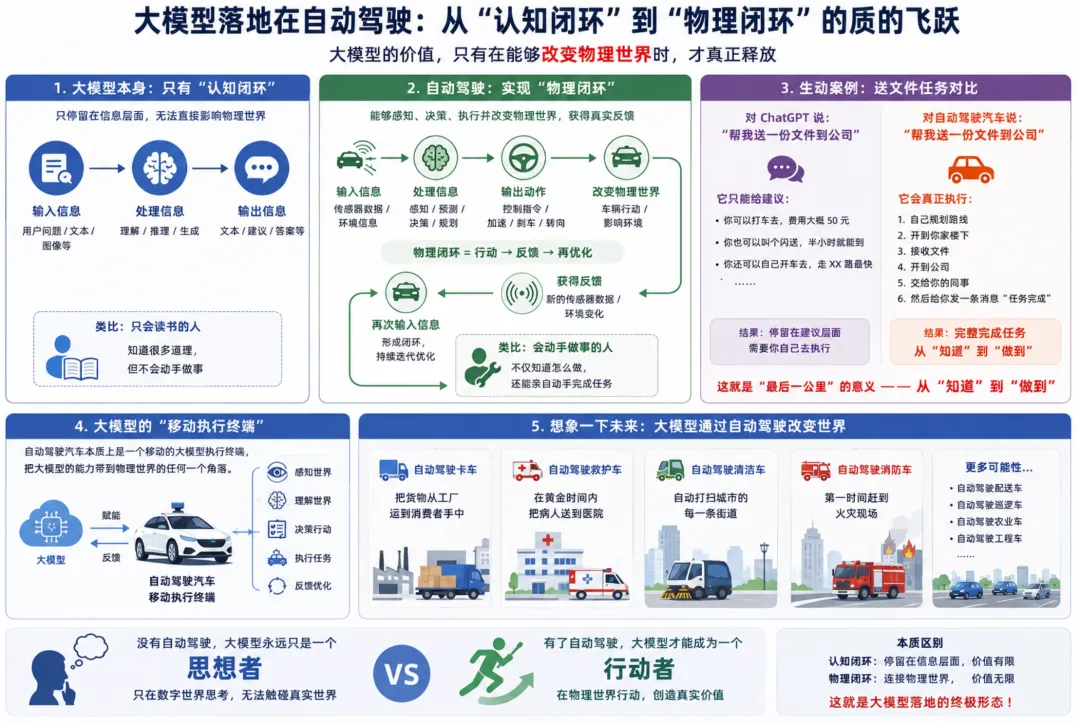
大模型诞生以来,一直面临一个根本性的困境:它只能在数字世界里 "纸上谈兵",无法直接影响物理世界。
它可以告诉你怎么泡一杯咖啡,但它不能真的给你泡一杯咖啡;
它可以告诉你怎么去机场,但它不能真的开车送你去机场;
它可以告诉你怎么送一份文件到公司,但它不能真的帮你把文件送过去。
而自动驾驶,就是解决这个困境的关键钥匙。它是第一个能让大模型自主地、大规模地、安全地在物理世界中执行任务的工具。
1. 从 "认知闭环" 到 "物理闭环"
大模型本身只有 "认知闭环",而自动驾驶实现了 "物理闭环",这是一个质的飞跃。就像一个人从只会读书,变成了会动手做事。
2. 大模型的 "移动执行终端"
自动驾驶汽车本质上是一个移动的大模型执行终端。它可以把大模型的能力带到物理世界的任何一个角落。
想象一下未来:
- 大模型可以通过自动驾驶卡车,把货物从工厂运到消费者手中
- 大模型可以通过自动驾驶救护车,在黄金时间内把病人送到医院
- 大模型可以通过自动驾驶清洁车,自动打扫城市的每一条街道
- 大模型可以通过自动驾驶消防车,第一时间赶到火灾现场
没有它,大模型永远只是一个 "思想者";有了它,大模型才能成为一个 "行动者"。
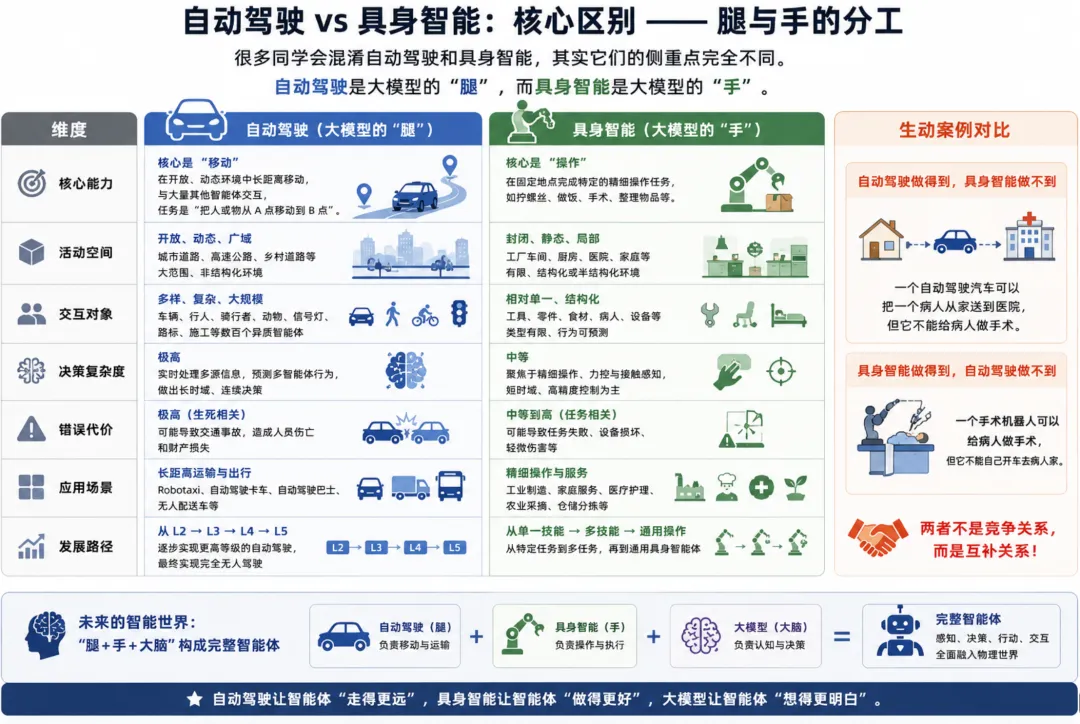
四、与具身智能的核心区别:腿与手的分工
很多同学会混淆自动驾驶和具身智能,其实它们的侧重点完全不同。我们用一个非常贴切的比喻来区分:
自动驾驶是大模型的 "腿",而具身智能是大模型的 "手"。
这就是两者的本质区别。它们不是竞争关系,而是互补关系。未来的智能世界,将是 "自动驾驶的腿" 加上 "具身智能的手",再加上 "大模型的大脑",共同构成一个完整的智能体。
五、总结:自动驾驶定义了大模型时代的物理基础设施
最后,我想用一句话总结今天的内容:
如果说大模型是第四次工业革命的 "大脑",那么自动驾驶就是这次革命的 "血液循环系统"。
它不仅是大模型能力的最高阶体现,更是大模型连接数字世界与物理世界的桥梁。没有自动驾驶,大模型的价值将大打折扣;而没有大模型,自动驾驶永远无法实现真正的完全自动驾驶。
我们现在正处在这个历史转折点上。未来十年,自动驾驶将彻底改变我们的城市、我们的交通、我们的生活方式。而在座的各位,将有幸成为这个伟大变革的见证者和参与者。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
