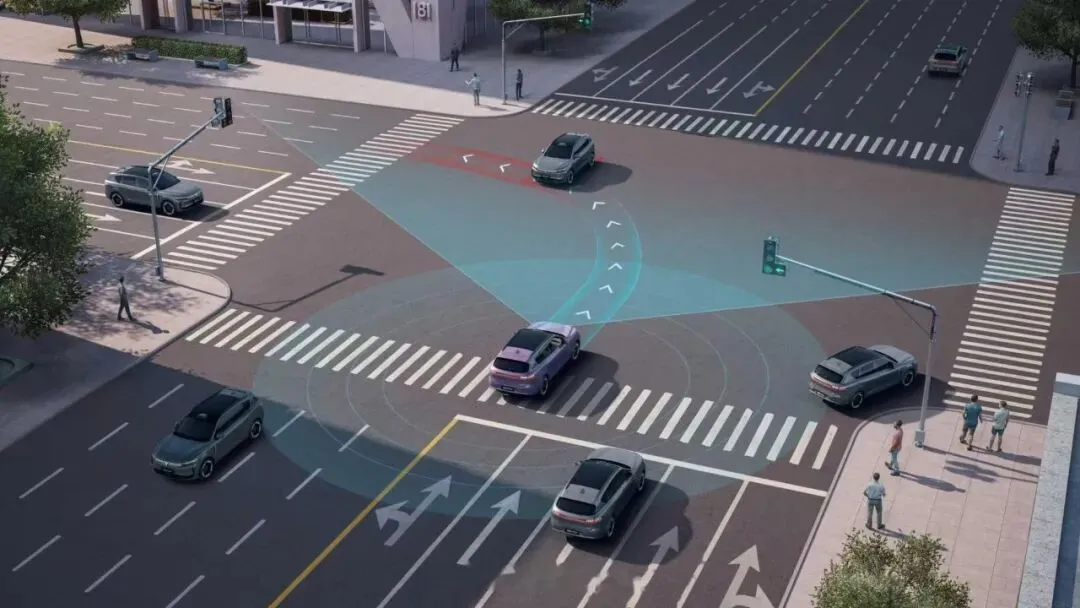
感知定位层是智能驾驶系统的数据输入源头,也是所有智驾功能落地的前提,核心解决“车辆在哪、周围有什么”的核心问题,主要包含传感器采集、数据融合、高精地图、融合定位四大核心模块。
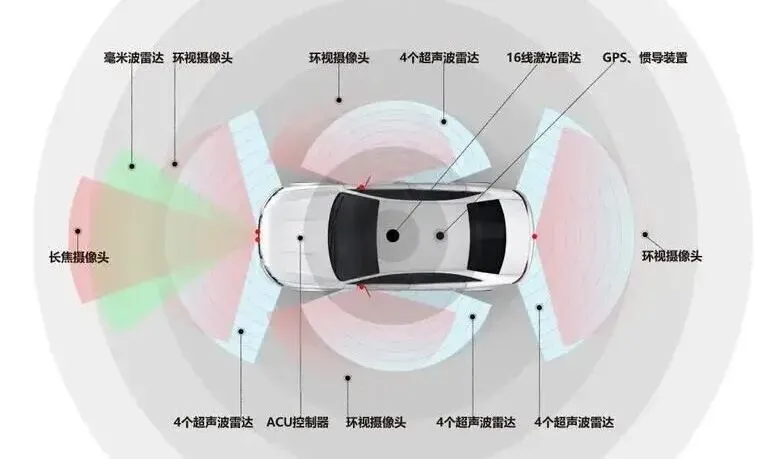
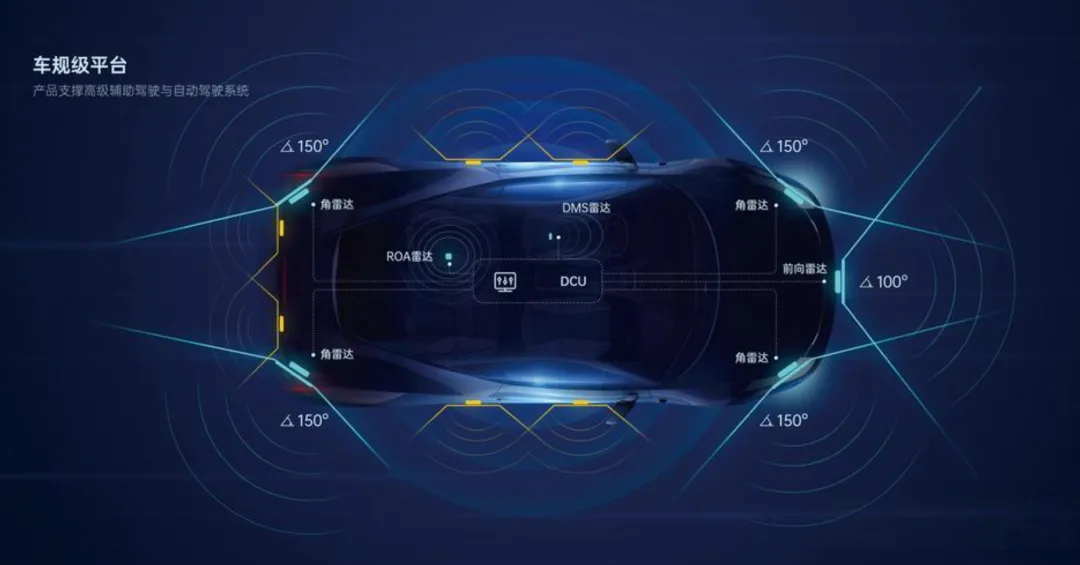
在硬件采集端,系统搭载多类主流车载传感器,形成多传感器互补冗余的采集体系:激光雷达精准测距建模、毫米波雷达抗干扰适配雨雪雾恶劣天气、高清摄像头识别车道、交通标识、红绿灯及行人车辆、超声波传感器适配近距离泊车、障碍物探测场景。各类传感器7×24小时实时采集车辆周边道路拓扑、障碍物位置、行人动向、交通信号等全域环境数据,实现“无死角”环境信息捕捉。
单纯的单一传感器数据存在误差、盲区与局限性,因此数据融合模块是感知层的核心核心。该模块通过专属融合算法,对多维度传感器原始数据进行清洗、匹配、关联与重构,弥补单一硬件的感知缺陷,剔除无效干扰数据,最终输出精准、统一、全面的全局环境模型,让车辆对周边场景的认知远超单一传感器的判断维度。
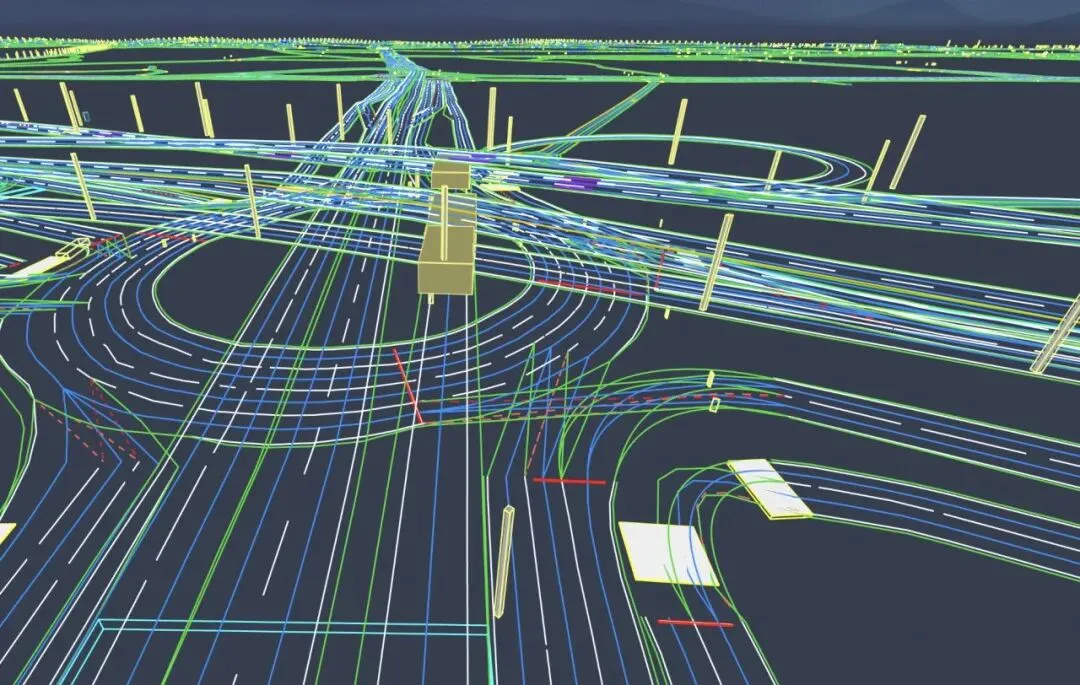
同时,系统依托高精度地图实现结构化环境认知。区别于普通民用地图,智驾专用高精地图包含精细化车道线、道路拓扑结构、交叉口形态、交通标志分布、路面属性、路口通行规则等海量静态数据,为车辆提供先验环境信息,辅助感知模块预判路况、识别复杂道路场景。
基于感知融合数据与高精地图先验信息,融合定位模块完成车辆自身状态精准解算。通过多源数据融合算法,实时估算主车的精准位置、车身姿态、行驶速度、加速度、航向角度等核心运动参数,实现厘米级定位,为后续决策规划、轨迹控制提供精准的坐标基准,从根源避免定位偏差导致的行驶异常。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
