如果说端到端大模型是自动驾驶的“大脑”,那占用预测(3D Occupancy Prediction)就是决定它能否存活的“眼睛”。本文用第一性原理拆解:为什么物理世界不是方块组成的?感知技术为何必须从“语义识别”走向“空间存在”的终极升维?图 1:感知视界的升维:当物理世界被重构为发光的3D体素网格“物理世界不是由方块组成的。”
💥 开篇暴击:长尾杀手与“框”不住的物理世界
各位搞规控和感知的兄弟们,大家晚上好,老兵知猷又来和大家复盘了。如果说上一期我们聊的“端到端大模型”是自动驾驶的“大脑”,那今天我们要聊的,就是决定这个大脑能不能活下去的“眼睛”。
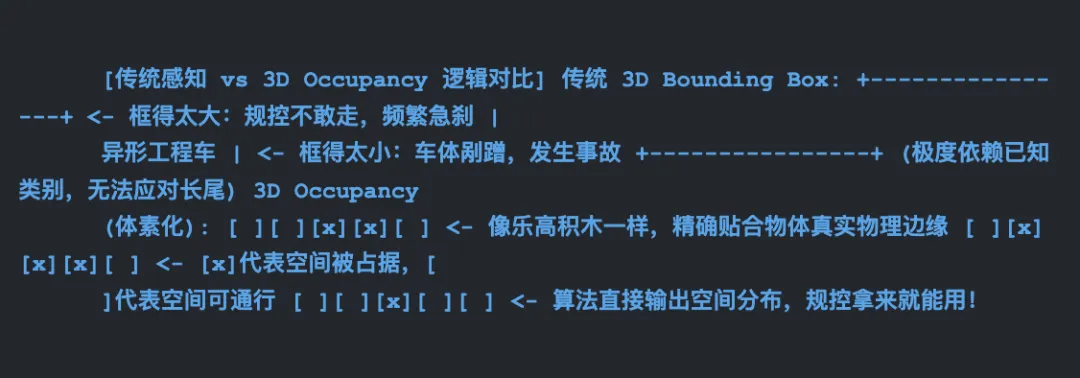
现在国内很多主机厂的感知团队,依然在死磕传统的 3D目标检测(3D Object Detection)。其本质逻辑,就是给摄像头或雷达看到的东西“画框框”(Bounding Box)。但你们有没有发现一个致命的问题:物理世界不是由方块组成的!
如果路上侧翻了一辆半挂车,或者前面是一辆拉着十几米长钢管的异形卡车,甚至是一头突然从灌木丛里窜出来的野猪,你的白名单词库里有这些类别吗?对于传统的 3D 目标检测模型来说,如果没有预先标注好的类别,模型就会直接变成“瞎子”,车辆会毫无减速地直直撞上去。
这就是智驾行业最头疼、也是致死率最高的长尾问题(Corner Cases)。今天,我们就用第一性原理来拆解,为什么以特斯拉为首的智驾头部玩家,都在疯狂砸钱搞 3D占用预测(3D Occupancy Prediction)。
🧠 底层逻辑:从“语义识别”到“空间存在”的第一性原理升级
要搞懂 3D Occupancy,我们得先做个思维升维:把世界变成“我的世界(Minecraft)”。
传统感知的逻辑是典型的因果思维:“识别它是什么 -> 确定它的边界框”。而 3D Occupancy 的逻辑是极简的物理思维:“不管你是什么,我只看这个立体空间里有没有东西挡着我”。
它将车辆周围的 3D 物理空间,切割成无数个细小的立体网格,我们称之为 体素(Voxel)。算法根本不需要去纠结这个格子里是一只狗、一块石头还是一个被风吹起的塑料袋,它只做一件事:判断这个格子是被占据(Occupied)还是空闲(Free)。
在端到端(End-to-End)时代,感知不再是为了“让人类看见类别”,而是直接服务于“系统的规划与控制”。规控模块只需要知道哪里能走、哪里不能走,这正是 Occupancy 提供的终极价值。
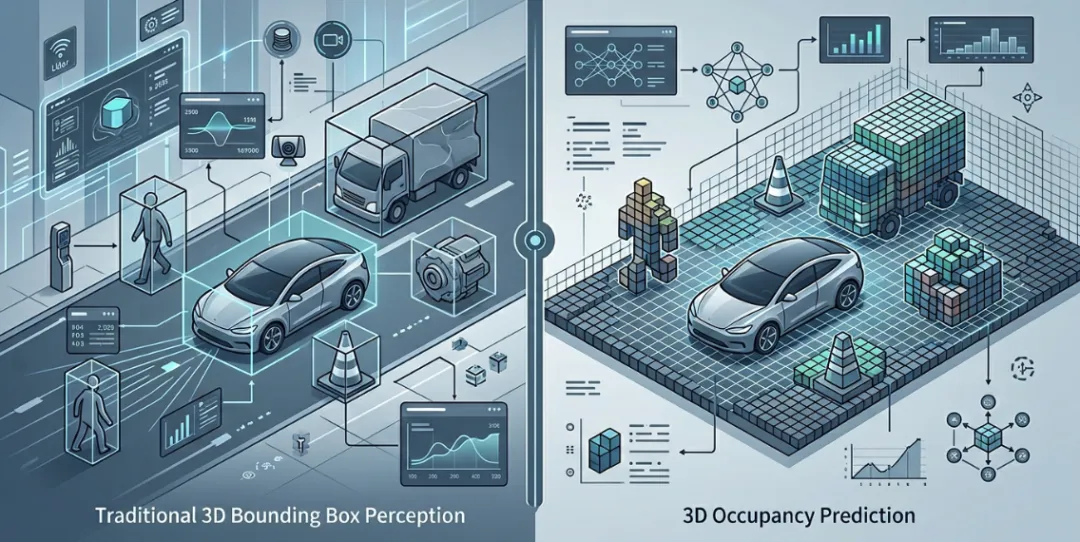
图 2:刚性边界框面对异形物体的失真,与体素化空间占用的精准贴合图 3:当规控系统不再接收目标分类框,而是直接吞吐密集的Occupancy网格目前,主流的工业界和学术界在这个领域打出了三大技术流派,各有各的狠活:
- 特斯拉的 Occupancy Network(工程派王者):特斯拉在 AI Day 上一战封神的技术。它不仅吃进了多摄像头的视频流,还结合了光流法(Optical Flow)。它不仅能输出静态的占用体积,还能预测出动态的占用流(Occupancy Flow)——也就是说,它不仅知道现在这个格子里有东西,还知道下一秒这个东西会往哪个方向移动。这是无图智驾和规控一体化的绝对底牌。
- NVIDIA 阵营的 FBOcc 与 VoxFormer(算力派代表):英伟达这种算力土豪搞出来的东西,就是大开大合。比如 FBOcc(前向后向投影技术),参数量直接干到10亿以上的量级,通过前向和后向的深度特征投射,强行把 2D 图像特征升维到 3D 空间。而 VoxFormer 则是通过 2D 图像特征去 Query(查询)3D 体素,效率极高,非常适合算力受限的量产车企。
- 学术界黑马 OccGen (Generative Occupancy):这是目前最前沿的玩法。传统的占用预测遇到“视野遮挡”时,物体后面就会出现“空洞”。OccGen 引入了生成式 AI 中的扩散模型(Diffusion Model),采用“从噪声到占用(Noise-to-Occupancy)”的范式。就像人脑会“脑补”被挡住的半截汽车一样,大模型也能把遮挡区域的体素给“生成”出来,极大提升了感知的完整性。
感知架构路线核心差异对比 | | | |
|---|
| 输出形式 | | | |
| 长尾泛化能力 | | | |
| 遮挡处理 | | | |
| 算力消耗 | | 高(需依赖 Sparse Convolution) | |
📓 知猷回忆录:被环卫车刮飞的后视镜与凌晨三点的复盘
说到这个,老兵我可是交过昂贵的学费的。记得在 202*年,我们在做某 L4级 Robotaxi 项目 时,车辆在亦庄的测试路段上跑。前方出现了一辆正在作业的环卫扫地车。
图 4:异形工程车与伸出的扫帚,永远是刚性 Bounding Box 的噩梦当时的感知系统用的是最先进的 3D 边界框算法。系统成功把这辆车识别为“Truck”(卡车),并在它身上画了一个方方正正的框。但致命的问题来了:扫地车侧面伸出来的两个大扫帚,并不包含在这个“标准框”的训练集特征里。
感知系统给规控下发的边界判定是安全的,但车辆开过去时,“砰”的一声巨响,测试车的右侧后视镜直接被扫帚刮飞了。
那天晚上整个团队复盘到凌晨三点。我们死磕代码,加了无数针对异形车辆的规则补丁,但我们心里都清楚:只要还在用刚性边界框去框定这个复杂的世界,这种事就永远会发生。 只有真正把空间体素化,去感知物理实体的“存在”本身,才是跨越这道鸿沟的唯一解。
🛡️ 实战避坑:转型 3D Occupancy 的三条生死线
对于现在正在痛苦转型 3D Occupancy 的感知团队,老兵给你们三个硬核忠告:
- 警惕“算力黑洞”,强推 Sparse Convolution:把 2D 升维到 3D,体素的数量是呈立方级爆炸的。如果一上来就把网格画得太细(比如 10cm x 10cm),就算有英伟达 Orin 也瞬间被榨干,你们的算力平台根本扛不住。必须结合稀疏卷积(Sparse Convolution)算法,只对有东西的、占据的格子进行特征计算,跳过海量的 Free 空间。
- 真值标注是生死线,搭建 Auto-Labeling 体系:3D Occupancy 最大的痛点是没有 Ground Truth(真值)。靠人工拿着鼠标去标几百万个 3D 像素是天方夜谭。必须在云端搭建一套基于 NeRF(神经辐射场) 或者自动激光雷达点云拼接的自动标注流水线(Auto-Labeling)。没有数据产线,再好的模型也是空中楼阁。
- 别把“时序”给丢了,死磕 Occupancy Flow:单帧的 Occupancy 只是一个静态的 3D 照片,没有灵魂。端到端时代,必须在网络中加入时序记忆(Temporal Memory),算出动态的 Occupancy Flow(占用流)。规控团队只有拿到带速度矢量的空间流,才能在拥挤的中国路况下做博弈和轨迹规划。
🎁 变现转化区:独家感知架构底稿流出
想要在这一波“感知技术换代”中活下来,底层逻辑和前沿源码缺一不可。
图 5:从算力到算法,感知重构的背后是工程落地的硬核积淀👇 总结互动话题感知路线大变局,你更看好特斯拉强调时序的工程派、英伟达大力出奇迹的算力派,还是 OccGen 这类充满想象力的生成式路线?遇到过 Bounding Box 解决不了的奇葩障碍物吗?欢迎在评论区留言吐槽,老兵在评论区等你探讨!
📮 版权声明:本文版权归【知猷君】所有,禁止未经授权的爬取、复制和洗稿转载。如需白名单授权,请联系作者本人。
📱 🎯 知猷·新能源智库 | 你的随身技术军师👇 获取更多硬核资源 & 搞钱路子 👇
- 微信公众号:搜索 “知猷”,关注后点击“发消息”,长期围观老兵的造车手记。
💡 打赏随意:如果这篇文章帮你省了加班时间,欢迎打赏,金额随意,交个朋友!
关注知猷君,在浮躁的时代,我们只谈有逻辑的硬核技术。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
