导读:自动驾驶正加速走向规模化应用,但一个长期存在的难题仍未得到根本解决:长尾危险场景的数据稀缺。
真实道路数据大多来自安全驾驶过程,强行加塞、突发碰撞、闯红灯等高风险场景在数据集中占比极低。端到端自动驾驶模型若长期仅接触安全驾驶样本,会逐渐产生一种“安全惯性”——日常场景下表现流畅,一旦逼近碰撞、压线或违规边界,往往反应滞后、修正能力不足。
如何生成既接近真实视觉效果、又具有合理物理交互过程的高质量边界场景数据?这是礁屿智界技术团队近期重点攻克的课题。
不同于传统仿真器完全依赖人工建模、或日志回放缺乏交互响应的做法,礁屿智界团队提出了一套“真实数据构建场景底座 + 反应式交通模型驱动风险演化”的技术路线。
整体流程分为三个环节:
场景重建:基于多遍历高斯泼溅方法,将真实驾驶数据转化为可编辑的三维场景表示,静态背景与动态车辆彻底解耦;
风险演化:引入IDM跟车模型与MOBIL换道模型,对背景车辆进行闭环推演,生成压线、碰撞、闯红灯等边界场景;
结果输出:将生成轨迹重新映射回场景,输出结构化轨迹文件与多视角可视化结果。
这一设计的核心价值在于:高风险驾驶行为并非人工随意拼接,而是在真实场景之上、经由符合物理规律的交通博弈逐步推演形成的。
阴天逆行图
真实道路环境中,动态车辆会遮挡大量静态背景信息。团队采用多遍历高斯泼溅机制,通过多次采集同一区域的配准与融合,补全了单次遍历中被遮挡的区域,同时将动态车辆以独立刚体节点形式从背景中分离出来。
这意味着:静态环境得以无遮挡复原,动态车辆则以独立单元形式存在,支持轨迹的灵活修改与重新布设,为后续风险演化提供了灵活的操作空间。
在NavSim真实数据集上的验证表明,该重建方法在主前视、左前视、右前视的平均PSNR达到27.68 dB,SSIM为0.873,具备较高的视觉保真度。
“
技术亮点二:反应式交通模型驱动,让风险演化“讲逻辑”
简单对轨迹加入随机扰动,很容易生成不符合车辆运动规律或道路语义的无效样本。团队的做法是:用微观交通流模型“接管”背景车辆,使其对自车或邻车的异常行为做出合理响应。
在这一框架下,团队针对三类典型边界场景分别设计了生成策略:
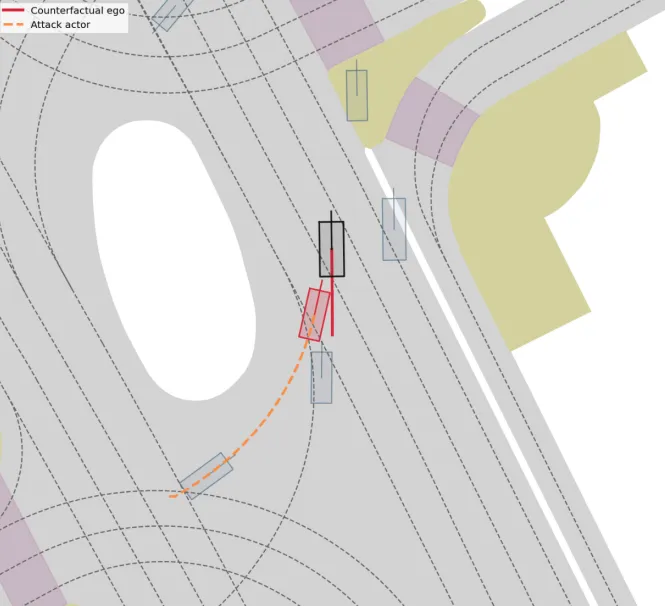
碰撞场景:通过修改背景车辆的跟驰参数或换道策略,诱导其执行切入、急刹等高危动作;
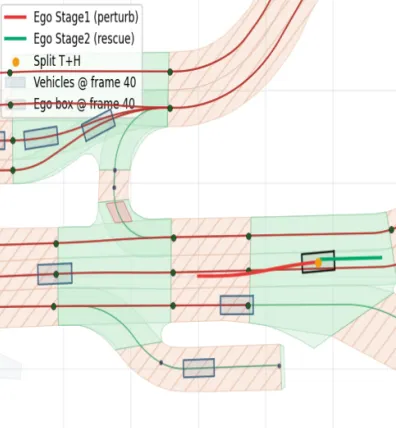
压线与加塞场景:采用“边界状态挖掘 + 交互诱导/模板偏移 + 恢复规划”的双阶段演化;
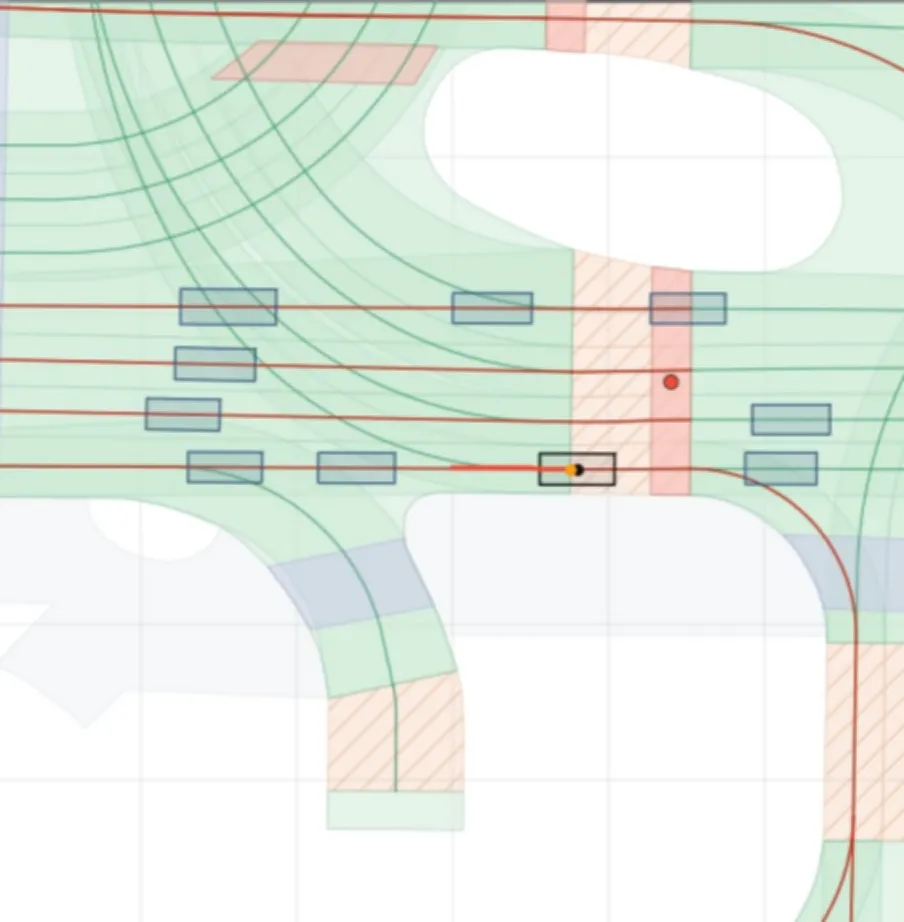
闯红灯场景:基于信号灯种子场景与违规模板偏置,生成具有明确规则语义的违规边界样本。
生成的数据是否真正有价值?团队从两个维度进行了分析。
风险分布方面,在碰撞场景子集中,生成场景的前碰撞最小TTC(碰撞时间)整体更小,高风险帧占比更高,这说明生成样本能够将风险分布由原本偏安全的区间推进到更接近危险边界的区域,对长尾危险样本具有实际补充作用。
动力学合理性方面,约95.3%的生成加速度点位于常见附着边界内,说明大多数样本在车辆运动层面保持了基本合理性,而非几何层面成立但物理层面失真的“伪样本”。
“
应用价值:为端到端自动驾驶提供更丰富的“边界经验”
当前,礁屿智界团队已基于NavSim真实驾驶数据集,完成了压线、高危碰撞和闯红灯三类边界场景的结构化生成与可视化输出。该方法能够在保持较高视觉真实性的基础上,扩展自动驾驶数据中的长尾危险场景,为端到端模型的训练与评估提供更具挑战性的样本支持。
未来,团队计划进一步拓展场景类型(如非机动车干扰、行人横穿、复杂路口博弈),完善轨迹到多视角图像的自动映射流程,并在统一实验设置下验证生成数据对端到端模型性能的实际增益。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
