低空自动驾驶与 AI 航路规划
重塑未来低空出行的核心引擎
当城市上空不再只有飞鸟,当 eVTOL(飞行汽车)、无人机穿梭于楼宇之间,低空经济正从概念加速落地为现实。而支撑这一变革的核心,正是低空自动驾驶技术与AI 航路规划系统—— 前者为飞行器装上 “自主之眼”,后者为低空交通编织 “智慧路网”,二者协同,正在开启安全、高效、规模化的低空飞行新时代。
一、低空自动驾驶:突破三维空间的自主飞行革命
低空(通常指 1000 米以下空域)环境远比地面复杂:高楼林立遮挡信号、气流紊乱干扰姿态、鸟群与临时障碍突发、电磁环境复杂多变…… 传统遥控飞行或固定航线模式,已无法适配低空规模化运行的需求,低空自动驾驶应运而生,构建起 “感知 - 决策 - 控制 - 执行” 的全闭环自主飞行体系。
1. 多传感器融合:低空飞行的 “火眼金睛”
自主飞行的前提是精准感知。低空自动驾驶系统集成IMU 惯性测量、北斗 / GNSS 卫星导航、激光雷达、视觉相机、毫米波雷达等多类传感器,通过扩展卡尔曼滤波(EKF)、因子图优化等算法实现数据融合,定位精度可达≤5cm,姿态误差≤0.1°,即便在城市峡谷无 GNSS 信号场景,也能稳定感知环境,识别建筑、障碍物、动态目标,为决策提供可靠依据。
2. 智能飞控与决策:从 “被动执行” 到 “主动判断”
区别于地面自动驾驶的二维控制,低空飞行器需应对三维姿态(俯仰、滚转、偏航)与复杂气动扰动。现代飞控系统融合自抗扰控制(ADRC)、滑模变结构控制(SMC)等算法,结合 AI 大模型与强化学习,实现三大核心能力:
全流程自主起降:无需人工干预,完成垂直起降、姿态转换、平稳巡航;
实时动态避障:对突发障碍(鸟群、临时施工)毫秒级响应,生成规避路径;
故障自主处置:实时监测飞行器健康状态,遇动力、传感器故障时自动规划应急迫降点。
3. 核心价值:从 “人工操控” 到 “智能自主”
低空自动驾驶彻底摆脱对人工操控的依赖,将90% 以上的人工干预削减,大幅降低人为失误导致的安全风险;同时突破地形与环境限制,让低空飞行可覆盖城市、山区、海岛等复杂场景,为物流配送、应急救援、通勤出行奠定基础。
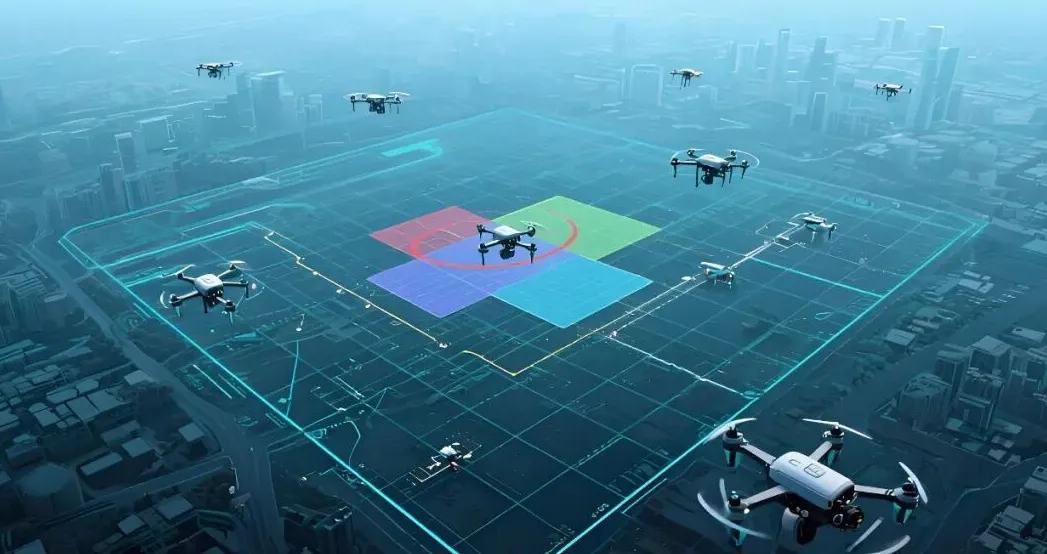
二、AI 航路规划:低空交通的 “智慧中枢”
如果说自动驾驶是飞行器的 “大脑”,AI 航路规划就是低空空域的 “交通指挥中心”。传统航空的固定航路、人工调度模式,完全无法应对未来成千上万架飞行器的密集飞行 ——AI 航路规划以 4D 空域(三维空间 + 时间轴)为核心,融合大数据、强化学习、数字孪生技术,实现 “动态规划、冲突消解、多机协同、安全合规” 的全链路智能调度。
1. 核心技术:从静态路径到动态智能规划
AI 航路规划的演进,是从传统算法到 AI 融合的升级,核心技术架构清晰且高效:
基础算法层:改进型 A*、RRT * 融合策略,搭配 NSGA2 多目标优化算法,兼顾路径最短、能耗最低、时效最优,任务达标率提升 20%,能耗降低 21%;
AI 决策层:深度强化学习(PPO、DQN)+ 空域大模型,实时融合气象、空域限制、交通流量数据,动态调整航路;
协同调度层:分布式 MPC + 图神经网络(GNN),构建时空走廊,支持千架级飞行器集群协同,提前 10 分钟消解飞行冲突,避障成功率达 99.2%。
2. 核心能力:破解低空飞行三大痛点
动态适配复杂空域:构建低空数字孪生空域模型,15 分钟级更新 4D 空域图,自动识别禁飞区、限飞区、危险天气区,生成合规航路,空域利用率提升 32%;
实时冲突消解:针对多机交叉、相向飞行场景,通过博弈论优化与时空切片调度,毫秒级分配飞行时序与高度层,杜绝碰撞风险;
多目标全局优化:平衡安全、时效、能耗、噪音等多维度需求 —— 城市通勤优先时效,物流配送优先能耗,居民区优先低噪音路径。
3. 核心价值:让低空飞行 “有序、高效、安全”
AI 航路规划打破传统低空飞行 “无序乱飞” 的困境,实现 “一机一路、一时一空”的精细化管理:指挥员工作量降低 60%,多机协同效率提升 70%,飞行事故率降低 45%,为低空经济规模化运营提供核心保障。
三、技术协同:自动驾驶 + AI 航路规划,构建低空智能飞行闭环
低空自动驾驶与 AI 航路规划并非孤立存在,而是深度耦合、双向赋能的关系,共同构建 “全局规划 - 局部执行 - 实时反馈 - 动态优化” 的闭环系统:
AI 航路规划(全局):根据任务需求、空域状态、交通流量,为飞行器规划从起点到终点的全局最优航路,下发至自动驾驶系统;
低空自动驾驶(局部):执行全局航路,通过多传感器感知实时环境,遇局部障碍或突发情况时,自主完成避障与路径微调;
双向反馈优化:自动驾驶系统将实时飞行状态、环境数据回传至航路规划平台,AI 据此动态更新全局航路,适配最新空域与气象变化。
这种协同模式,既保证了低空交通的全局有序,又赋予飞行器局部自主的灵活性,是未来低空出行安全高效运行的核心支撑。
四、落地场景:从技术到应用,赋能千行百业
自动驾驶与 AI 航路规划的成熟,正推动低空经济从试验走向商业化,覆盖三大核心场景:
城市空中通勤(UAM):eVTOL 搭载自动驾驶系统,依托 AI 航路规划,在城市楼宇间规划低空航线,实现 15-30 分钟跨城通勤,缓解地面交通拥堵;
低空物流配送:美团、京东等无人机在 AI 航路调度下,自主完成 “最后 10 公里” 配送,突破地形限制,效率提升 3-5 倍,成本降低 28%;
应急与行业应用:灾害救援中,无人机集群自主规划航路,快速抵达灾区;电力巡检时,自动驾驶无人机沿输电线路自主飞行,AI 识别缺陷,效率提升 5 倍。
五、挑战与未来:技术突破,驶向万亿蓝海
当前,低空自动驾驶与 AI 航路规划仍面临复杂环境鲁棒性、多机协同规模化、适航认证标准化、数据安全与隐私保护等挑战,但随着技术迭代与政策完善(如中国民航局 “低空经济三年行动方案”),突破已在眼前。
未来,随着大模型深度融合、5G-A 通感一体、天 - 空 - 云协同算力的成熟,低空自动驾驶将实现 “零人工干预” 全自主飞行,AI 航路规划将支撑万架级飞行器高密度协同,低空经济将迎来万亿级市场规模,彻底重构城市交通与产业生态。
从仰望天空到驰骋低空,低空自动驾驶与 AI 航路规划,既是技术创新的标杆,也是未来出行的答案。一个安全、高效、普惠的低空时代,正加速到来。
免责声明:我们尊重原创,也注重分享。文中部分素材来源网络,版权归原作者所有,如有侵犯您的权益请及时联系,我们将第一时间删除。(文章内容仅供学习交流,不做投资建议,如内容有误 ,可后台留言,我们将立即修正。)


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
