还在用Diffusion做端到端自动驾驶? 美团提出DriveAnchor:流匹配+Anchor才是量产答案
- 2026-06-18 14:46:53

扫描下方二维码,添加交流群深入交流

近距碰撞率暴降89%,平均奖励飙升32%,而模仿学习精度纹丝不动——这是端到端规划领域一次悄悄颠覆认知的工程跃进。读完本文,你不仅能完整搞懂这套“三阶段渐进式Anchor流学习”的每一个技术细节,还将获得一种将多样性、可控性与安全性彻底解耦的工业级落地思路。
❓ 为什么你该花10分钟读完它?
现在主流流匹配(Flow Matching, FM)做自动驾驶规划看起来很优雅:单步推理、确定性输出、能模仿专家轨迹。但一到了真实道路,三个硬伤立刻暴露:
1. 多样性靠运气——没有结构化先验,模型遇到长尾场景只会一句“臣妾做不到”,直接哑火。 2. 可控性要天价——想让车按某个走廊走(比如变道指定的空隙),就得把整个模型重新训练一遍,成本爆炸。 3. 安全性学不会——纯模仿只会对危险行为“模仿到底”,无法直接优化碰撞避让。
更棘手的是,这些缺陷互相纠缠。想要用RL对齐安全性,可经典策略梯度需要,而流匹配的确定性ODE根本算不出。想要在推理时注入约束,可驾驶安全Reward不可微,无法用在梯度引导上。这套死锁让很多团队止步于论文里的干净仿真。
DriveAnchor却用一个巧妙到极点的组合式管线,将三个问题分别扔给了三个完全解耦的阶段,并且每一个阶段都可以独立更新。接下来,我们深入到每一个算子和每一个训练技巧的层面,把它的设计直觉拆个干干净净。
🛠 先看一个底层动机:为什么需要“Voronoi”般干净的空间划分?
驱动整个框架的灵魂不是Transformer,而是一个拥有2398种轨迹“单词”的Anchor词汇表。要理解为什么它这么重要,我们得先看看传统的ε-ball采样会闹出什么笑话。
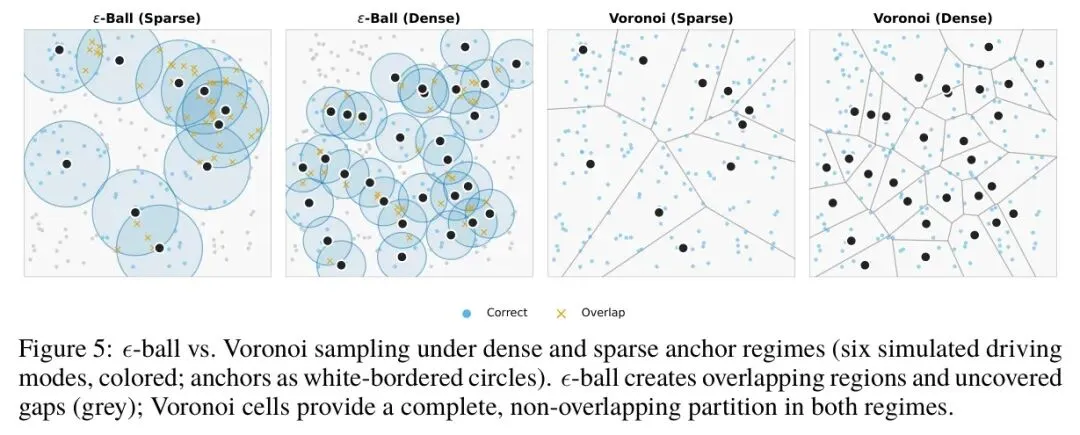
图:ε-ball采样(左两列)存在重叠盲区,而Voronoi细胞(右两列)实现全空间无缝划分,这正是构建Anchor词汇表的核心动机。
回想一下,当模型需要从噪音输入生成轨迹时,它必须依赖一个参考“基座”——Anchor。如果Anchor分布不均匀,一些罕见驾驶动作根本找不到合适的“近邻”来引导生成,梯度信号就会把不同模式搅在一起,导致模式坍塌。论文用ϵ-ball和Voronoi细胞的可视化对比,斩钉截铁地告诉我们:只有像Voronoi图那样无重叠、无死角的划分,才能让每一个GT轨迹都能“认领”到最匹配的Anchor。DriveAnchor的第一步,就是用FPS(最远点采样)在超1亿帧的历史语料上,挑选出2398个运动学上可行的轨迹基元,天然覆盖了直行、转弯、变道等全部机动类别。这等于给了模型一本“轨迹字典”。
🏗️ 架构:三段式训练,一条推理流水线
接下来,我们把整个系统的脉搏摸一遍。下面这张架构图,强烈建议你配合下文讲解反复回看。
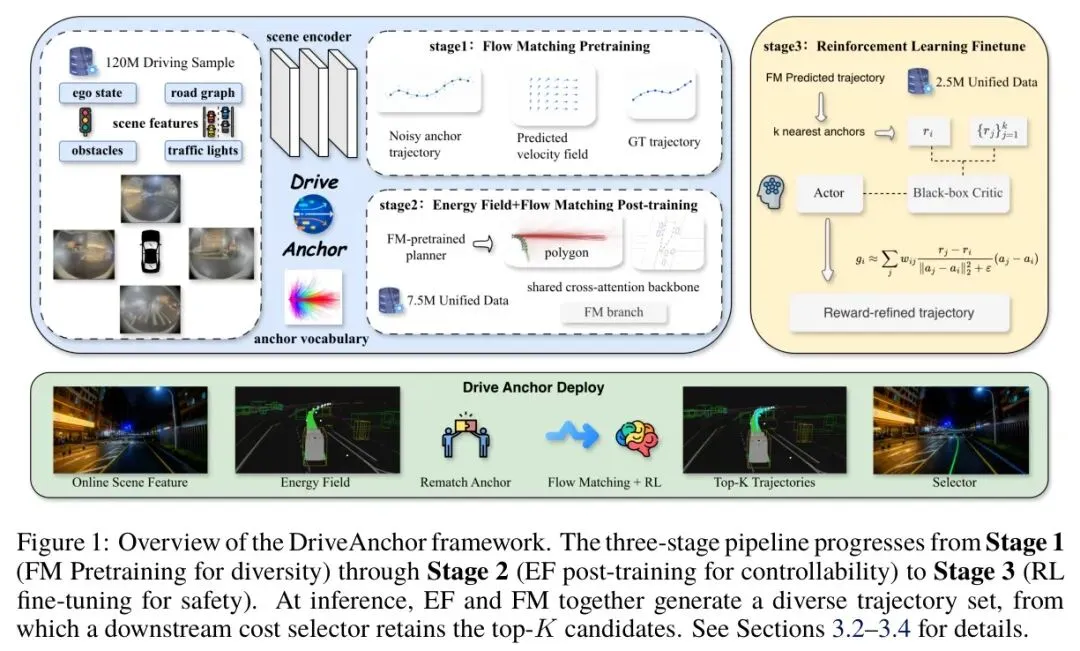
图:DriveAnchor三阶段训练与推理部署全景。第一阶段学习多样性,第二阶段注入几何可控性,第三阶段对齐安全Reward,三个阶段完全解耦。
架构图清晰地展示了从场景编码到最终轨迹选择的完整链路。场景编码器输入自车状态、道路图、障碍物和交通灯,输出场景特征。接下来的三阶段像三条独立的生产线:
• Stage 1:只靠流匹配让模型学会“根据Anchor预测GT”,训练出多样化的轨迹分布。 • Stage 2:引入一个**能量场(Energy Field, EF)**模块,它吃进静态道路几何和“多边形预设”(走廊约束),在FM生成前把Anchor重定位到指定区域,增加可控性——而且FM本身不用动。 • Stage 3:零阶强化学习上场,它对FM的输出进行安全Reward微调,但不需要计算,而是直接在Anchor空间做有限差分搜索,将碰撞率打到极低。
推理时,从在线场景特征出发,经过EF重匹配、FM+RL生成Top-K候选轨迹,最后交给独立的代价选择器。整个过程在NVIDIA Drive Orin上只需2.06毫秒。
下面,我们按训练的顺序,把每个阶段的“内功心法”一一剖开。
💡 Stage 1:用“轨迹词典”驯服多样性
流匹配的本质是学习一个速度场,将先验分布推到专家分布。传统做法是,然后预测。但DriveAnchor最胆大的修改是——扔掉时间步,直接利用Anchor近邻性:
其中就是结构化Anchor。损失仍然是均方误差,但模型不需要知道,它直接学预测。在推理时令,一次前传就恢复出轨迹。
由于每个GT都落在Anchor的“势力范围”内,残差极小,因此两次顺序前传(FM*2)就能把误差压低到接近精确解。
不过,单纯用KNN检索Anchor会出大问题。在Sparse Anchor区域,近邻可能来自完全不同的机动模式,梯度一混淆,模型就干脆躺平,只生成那种最“平均”的轨迹——模式坍塌。
DriveAnchor用了一个优雅的ϵ-ball滤波器来解决:只有距离小于阈值的Anchor才被允许成为邻居。这样无论局部密度如何,有效邻域永远被约束在同一个机动模式内部。
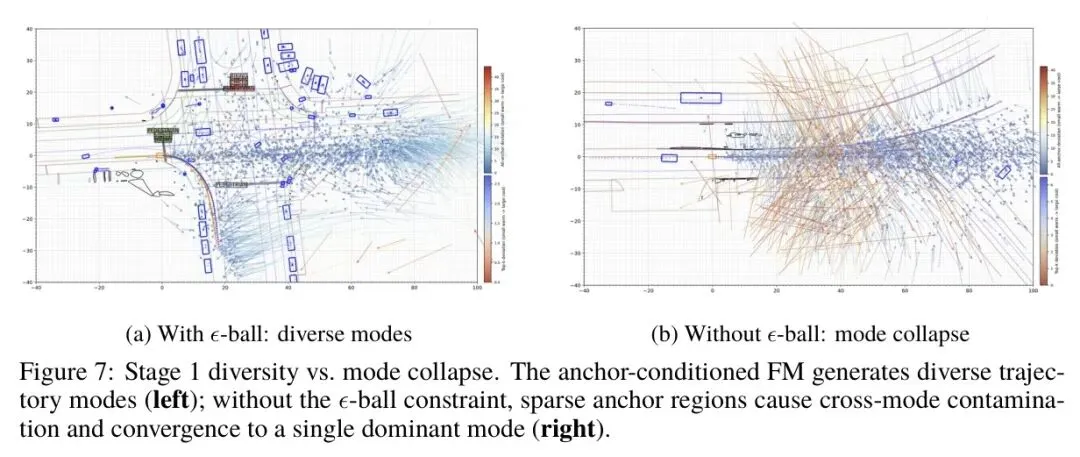
图:左侧在ϵ-ball约束下生成了多样的轨迹模式;右侧去掉约束后模式坍塌为单一主导轨迹。
看上面的可视化对比就一目了然。左边带着ϵ-ball,轨迹像一把伞一样散开,把路口可能的各种走向都覆盖到了;右边一摘掉约束,几乎全部收敛到一条最保险(但也最没用)的路径。这个设计,为后续安全微调铺好了方向丰富的搜索空间。
💡 Stage 2:几何驱动的“走廊导航仪”
第一阶段学出来的模型虽然花样多,但根本听不懂人话——你没办法告诉它“请在左数第二个空隙变道”。传统做法是从头训练或加可微引导,成本高得离谱。
DriveAnchor另辟蹊径,训练一个能量场EF模块,它的输入纯是静态道路几何(多边形预设),输出一个位移修正量:
重新匹配回词汇表后,再输给FM解码。这套流程最惊艳的地方在于,EF和FM处理正交信号:EF只看静态路型,FM专管动态博弈。当你要新增一个“短距硬截止变道”的预设时,只需用750万样本把EF后训练一下,FM纹丝不动。
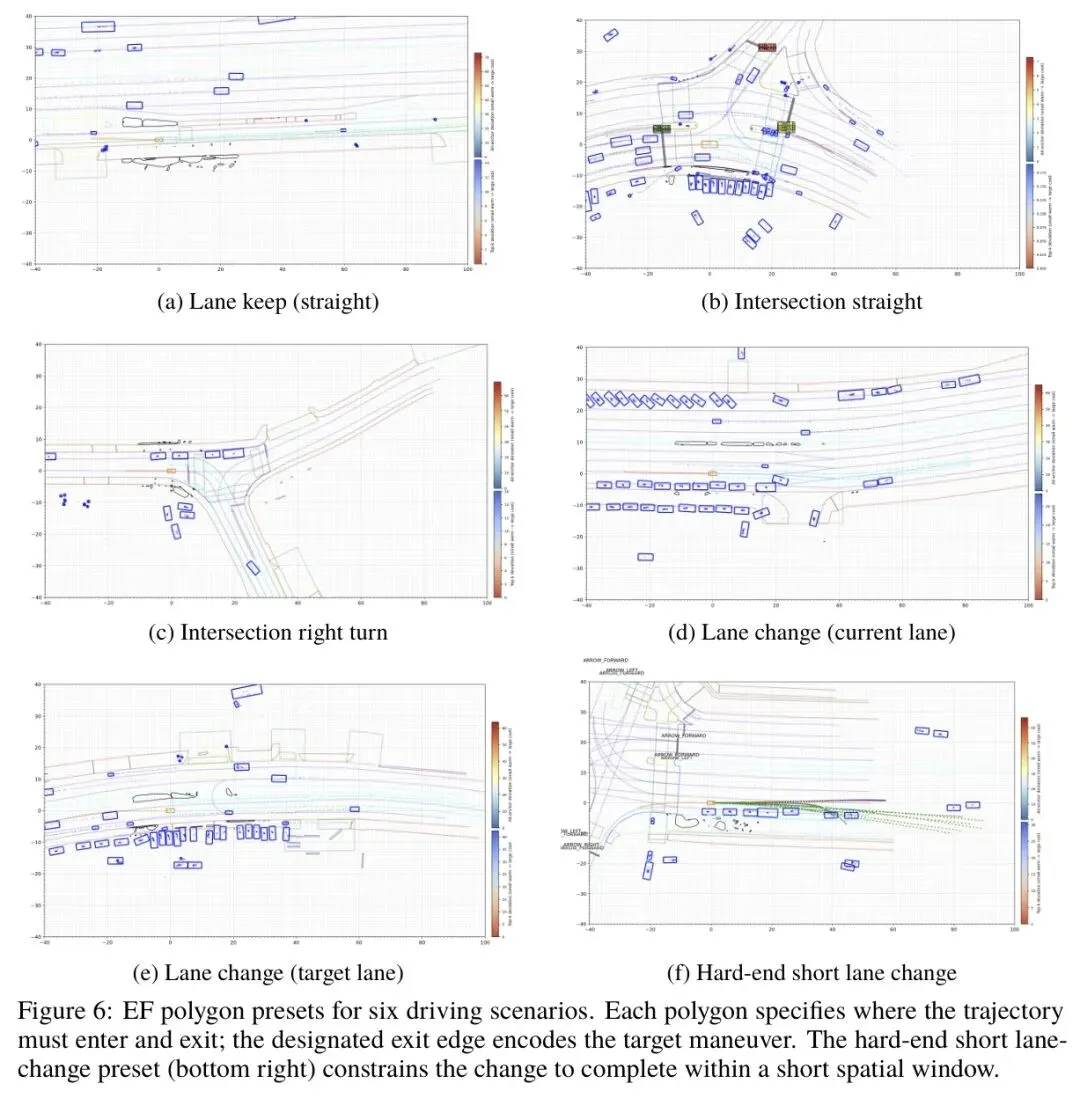
图:六种驾驶场景下的EF多边形预设,不同的进出区域编码了车道保持、路口转向、变道等行为。
这六个子图展示了EF的多边形如何把驾驶意图翻译成几何约束。每个场景定义了一个轨迹必须进入的区域和必须离开的出口边。EF的训练损失也很直接:如果一个Anchor已经是“好轨迹”(进入指定区域并从正确边离开),位移修正量为0;否则把它拉向最近的好轨迹。整个过程没有碰撞检测,EF的唯一职责就是空间合规。
💡 Stage 3:用“方向试探”替代策略梯度
终于来到最硬核的第三阶段。强化学习的目标是最大化:
问题是是黑盒碰撞检测,根本没梯度。常规RL得算,但流匹配的确定性映射根本没法给你这个值——难道要强行套上高斯SDE做近似,引入一堆偏差?
DriveAnchor利用了一个关键性质:单步模式下,是确定性的FFN,一个Anchor唯一确定一条轨迹。于是,安全优化退化为在Anchor空间里做方向搜索。具体做法是这样的:
对于每个Query Anchor ,在它的ϵ-ball邻居里找N个相邻Anchor,计算它们的Reward差异,然后用加权有限差分估计梯度方向:
其中权重按距离排名指数衰减。这个公式相当于收集了N个方向上的安全提升信号,然后合成一个最优的“牵引向量”。将它作为停止梯度常数乘到输出上,就形成了RL损失,和FM损失联合训练。
整个过程中,不需要,不需要SDE转换,不需要可微Reward,只需要黑盒碰撞检测器就能跑。RL损失权重保持适度,确保模仿精度不崩塌。
📊 数据不会撒谎:碰撞率骤降,可控性起飞
我们用最直观的表格和可视化来验证三个阶段的叠加效果。
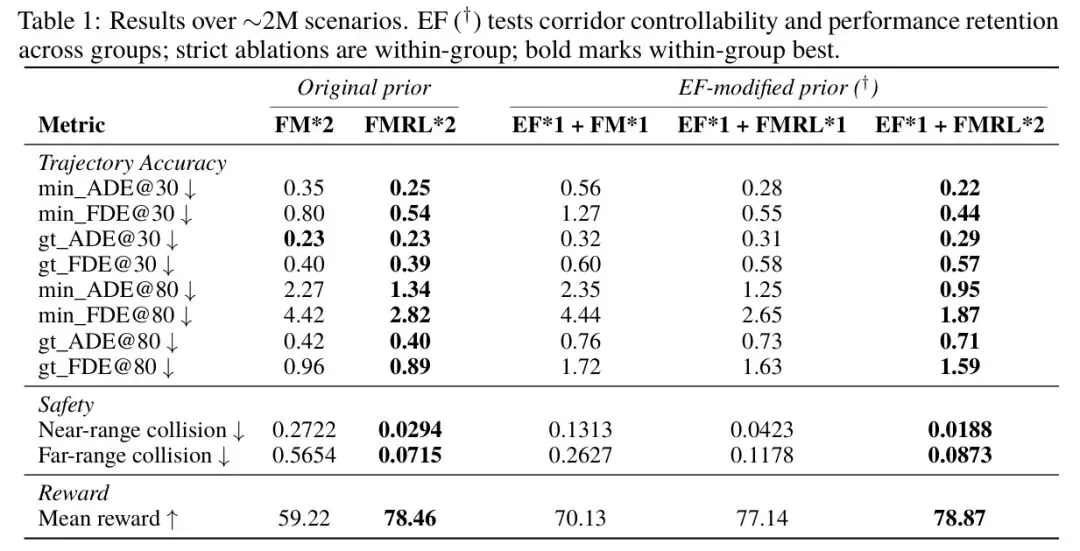
表:EF先验修改消融,EF1+FMRL2在轨迹精度、安全性和平均奖励上全面领先。
从表1可以读出几个关键信息:原始FM2的近距碰撞率高达27.2%,加入RL后(FMRL2)一脚踩到2.9%,远距碰撞也同步断崖下降,同时gt_ADE几乎不变,说明没有牺牲对专家轨迹的模仿质量。当EF介入后(EF1+FMRL2),近距碰撞进一步压到1.9%,而min_ADE@80从1.34缩到0.95,证明走廊引导不仅安全,还让生成轨迹更集中、更贴近道路拓扑。

表:对Top-50轨迹(按速度幅值排序)的性能评估,FMRL2将近距误差从13.7%打到0.47%。*
再缩小范围看Top-50候选,FMRL*2的表现更加暴力,近距碰撞率被压低了29倍。这意味着当最终的代价选择器做决策时,候选池里几乎全是安全的、高质量的轨迹。
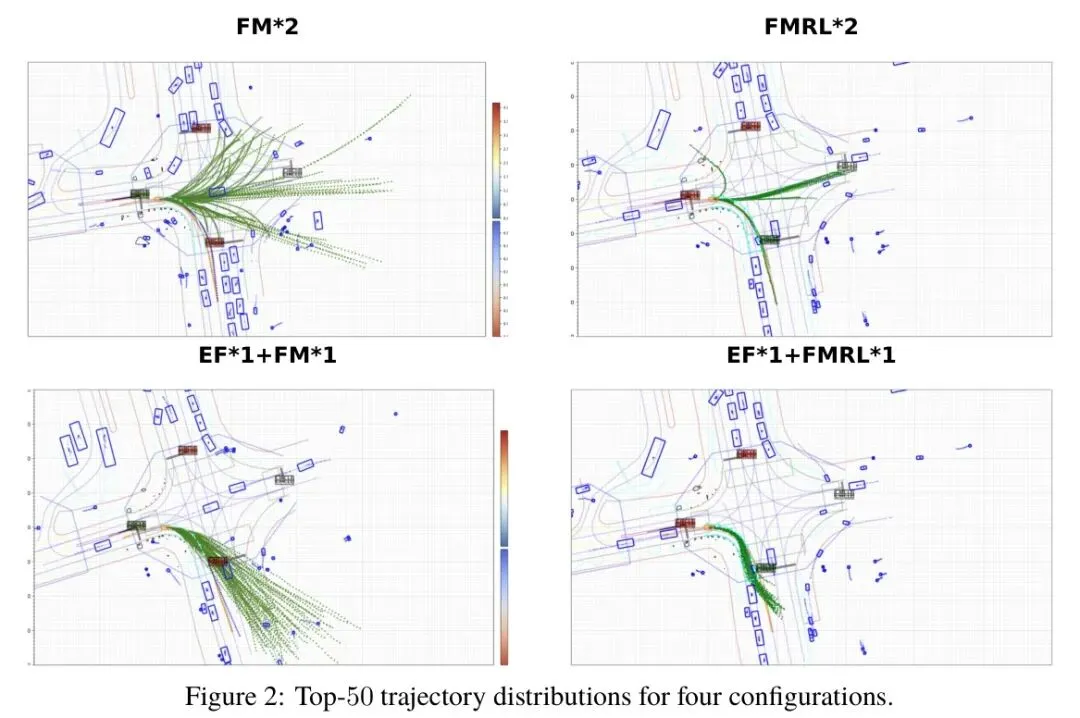
图:四种配置下的Top-50轨迹分布。加入RL后轨迹高度集中、贴合道路结构,EF则提供了精确的走廊目标定位。
可视化四种配置的轨迹分布,能清晰感受到RL的“收束”效果:FM2的轨迹像炸开的烟花,很多都偏离了道路可行区域;而EF1+FMRL*1已经能精准聚焦到预定走廊内,整个轨迹簇整齐划一。
训练动态也很健康。下面这张图显示,三个阶段全部稳定收敛,第三阶段的FM loss和冻结基线几乎重叠,说明安全优化是在不破坏已有模仿技能的前提下额外注入的能力。
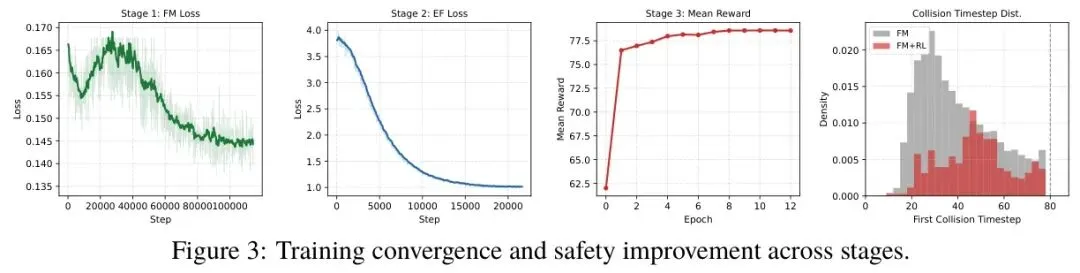
图:Stage 1 FM Loss收敛,Stage 2 EF Loss下降,Stage 3 Mean Reward快速提升,碰撞时间分布右移。
在锚点邻居数量N的消融中,N=4时方向覆盖仅2.5%,RL近乎无效;当N=16时,性能达到最优,且再增大收益甚微。这印证了只要2398个Anchor构建了多样化的基,适度的方向搜索就足够完成安全对齐。
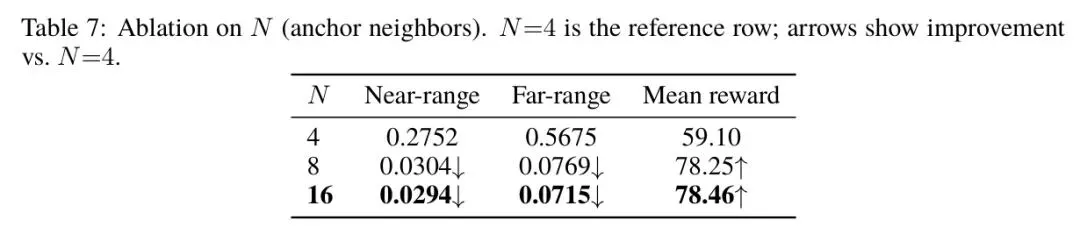
表:锚点邻居数量N的消融,N=16获得最佳安全与Reward平衡。
最后,必须提一下实车验证。在NVIDIA Drive Orin上,整套模型以float16精度运行,推理仅2.06毫秒,已经在真车上跑过行人横穿、路口混行等复杂场景。成本和精度都对量产友好。
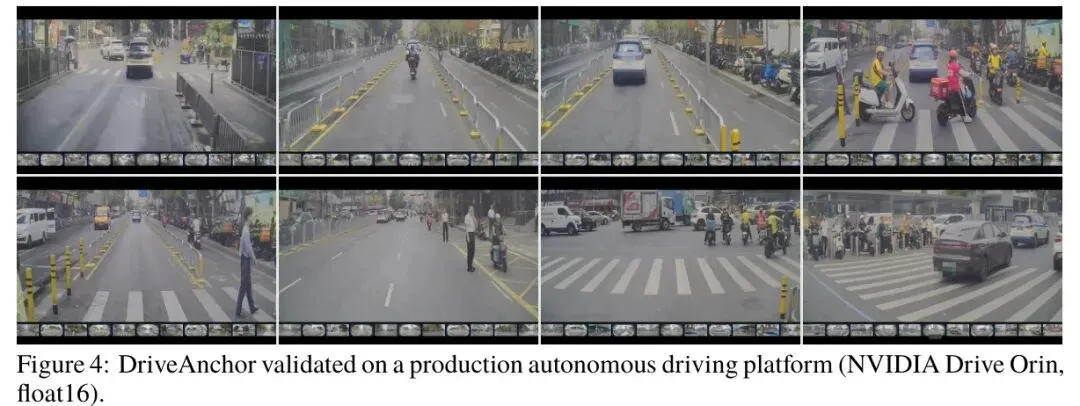
图:DriveAnchor在NVIDIA Drive Orin上的真实城市道路定性结果,覆盖行人横穿、密集并线等复杂工况。
⚖️ 局限与思考
这套框架并非完美。依赖海量内部数据集,没有在公开benchmark上评测,对罕见长尾动作的覆盖受限于FPS语料库。另外,EF目前只有空间约束,未来加入时间性引导(如要求在T秒内通过某个航点)将极大提升对时机的控制力,比如间隙选择场景。作者提出的基于Voronoi的Anchor采样方案,一旦落地,能让重匹配在构造上变得精确,彻底消除运动学退化,这又是一个有意思的演进方向。
你读到这里,是否也在思考:这套将多样性、可控性、安全性完全解耦的“三段式”思路,是不是也可以复用到你手头那些棘手的生成式任务上?欢迎在评论区分享你的构想。
🌟 三个核心收获,帮你10秒抓住本质
• Anchor词汇表:用2398个轨迹基元替代无结构高斯先验,给多样性套上结构化紧箍咒。 • 能量场EF:只靠静态几何做走廊引导,与FM独立更新,新增行为预设成本极低。 • 零阶RL:巧用确定性映射,把安全优化变成Anchor空间的方向搜索,无需,黑盒Reward直接可用。
🤔 互动时间:你认为这种三阶段解耦的设计,最可能率先颠覆自动驾驶的哪个细分场景?高速巡航、城区路口还是自动泊车?评论区留下你的观点!如果觉得这篇深度拆解对你有帮助,点赞+在看就是最好的支持,分享给你的技术伙伴,一起打破纯模仿学习的瓶颈。
#AI技术 #自动驾驶 #轨迹规划 #流匹配 #模型优化 #技术干货 #论文解读
参考
DriveAnchor: Progressive Anchor-based Flow Learning for Autonomous Driving Planning
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 影豹MG7领衔5款国产性能轿车怎么选
- 吉利新轿车,3.2秒破百+900V高压,续航701km,值得一看
- 吉利银河星耀7,10多万买中级电混轿车
- 2026款丰田凯美瑞,轿车买家要看这3点
- 大众5.3米旗舰轿车只卖27万,高铁级隔音+奥迪同款冰箱,特斯拉Model S该坐不住了?
- 十万级家用轿车挖到宝,带四驱的银河星耀7,日常开着实在舒心
- 比亚迪“大汉”登场:C+级旗舰纯电轿车,五大黑科技重塑高端格局
- 2026款路虎揽胜轿车,英式豪华值不值
- 奔驰GLC L SUV降到26万多先别急,真正要算的是买得起之后养不养得轻松
- 10万级气场拉满的5台SUV!不懂车的都以为值50万
