英文播客
本期播客我们将探讨混合手动–自动驾驶场景下的人机协同与驾驶员状态监测难题。我们将深度解析作者如何跳出传统单一驾驶模式下的分心检测框架,创新性地将“驾驶模式”作为上下文变量引入脑电解码,以应对驾驶员在手动控制与自动驾驶监督状态之间角色切换带来的跨模式认知差异问题。
论文档案
- • 题目: Adaptive driver distraction recognition in mixed manual–automated on-road driving via a context-aware framework
- • 摘要: The evolution of intelligent vehicles requires drivers to alternate between active control in manual driving (MD) and passive supervision in automated driving (AD). This introduces cognitive discrepancies that challenge existing driver monitoring systems, which typically focus on MD. Electroencephalography (EEG) offers direct access to neural activity related to attention, but most existing studies are conducted in simulators. We address this gap with an on-road experiment in which 43 participants drove under both manual and automated conditions while performing controlled distraction tasks as EEG was collected. Power spectral analyses of EEG reveal domain-dependent neural expressions of distraction in MD and automated supervision. The performance of existing models degrades significantly when generalizing across driving modes. To address this, we propose CADDNet, a framework that accounts for contextual information by injecting driving-mode information via a Domain-Gated Injection Block, achieving superior cross-mode distraction recognition (AUC = 93.8%), with consistently high performance in MD (95.7%) and AD (92.1%). It outperforms classical domain adaptation methods such as supervised contrastive learning and correlation alignment. The study offers ecologically valid on-road EEG evidence and a context-aware framework for distraction detection in future automated vehicles, benefiting road safety and the design of reliable human-centric AD systems.
- • 关键词: EEG; Automated driving; Human–machine interaction; Distracted driving; Cognitive load; Deep learning
- • 引用: Z. Dong, G. Qi, Y. Hao, S.-T. Zheng, R. Jiang, W. Guan, "Adaptive driver distraction recognition in mixed manual–automated on-road driving via a context-aware framework," Expert Systems With Applications, vol. 330, Art. no. 133093, 2026, doi: 10.1016/j.eswa.2026.133093.
背景挑战
随着智能网联汽车的演进,驾驶员的角色正在经历从“手动驾驶(MD)中的主动控制者”向“自动驾驶(AD)中的被动监督者”的转变。这种混合驾驶场景为驾驶员状态监测系统(DMS)的设计提出了新的议题。作者在文中指出了当前驾驶员监控任务面临的三大挑战:
- 1. MD与AD下驾驶员认知状态和任务角色差异:在MD状态下,大脑处于紧密的“感知-运动”闭环中;而在AD监督状态下,该闭环一定程度上被解耦,大脑转入被动信息接收的警戒状态。论文结果表明,分心相关 EEG 空间–频谱表征会随驾驶模式发生系统性变化。
- 2. 传统车辆指标和视觉监测在认知分心识别中的局限:传统车辆动力学指标在AD模式下由于纵向或横向控制权的转移,可能明显失效或效用下降;而基于摄像头的视觉监测容易受环境光照影响,且难以识别“视线仍在前方但认知上已脱离任务”的认知分心。
- 3. 传统跨模式检测的领域偏移:由于大多数现有研究主要基于MD场景,当直接将MD训练的检测模型迁移至AD场景时,性能会出现明显下降。而常见领域自适应方法通常倾向于学习域不变表示或进行特征对齐,这可能抑制与驾驶模式相关的任务有效特征。
科学方案:针对上述挑战,与大量模拟器研究不同,作者采用真实道路实车实验,依托具备 SAE Level 2 相关自动驾驶功能的实车平台(在AD条件下,车辆主要执行纵向控制,横向控制仍由驾驶员完成),开展了包含 43 名被试的真实道路车辆跟驰 EEG 实验。通过线性混合效应模型(LMM)分析了脑电特征中的模式依赖性。在此基础上,提出了一种名为 CADDNet 的框架,将“驾驶模式”作为上下文信息动态注入分心解码过程,在本文数据集上提升了混合驾驶环境下的识别性能和选择性预测表现。
系统架构
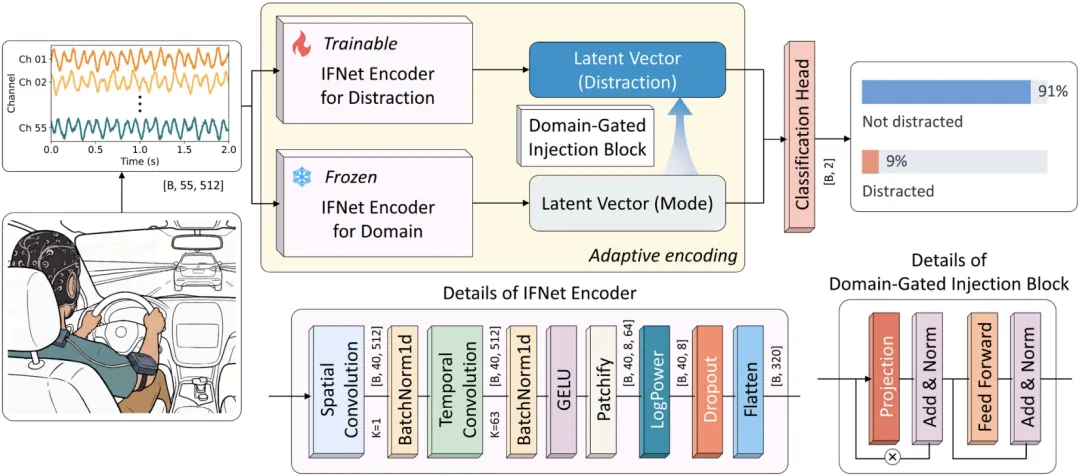
为了处理跨模式泛化问题,受前额叶皮层“上下文依赖计算”思想启发,作者构建了上下文感知分心检测网络 CADDNet。不同于分别训练MD/AD模型或单纯追求域不变特征对齐,该模型由以下核心模块构成:
1. 预训练驾驶模式编码器底层采用 IFNet 作为骨干网络。该模块预先针对驾驶模式(MD vs. AD)的分类任务进行训练,并在后续阶段冻结权重。其倒数第二层输出被作为驾驶模式相关隐表示 。
2. 领域状态映射为了使分心解码器获取当前的上下文信息,系统将模式编码器的隐表示投影为领域表示:
其中 为层归一化,用于稳定特征尺度。3. 领域门控注入模块分心编码器提取的潜在特征 通过门控残差方式接收模式相关信息的调制。模块通过一个双层感知机生成特征级的门控向量:
随后,通过残差注入完成特征的上下文融合:
最终生成的特征 再经过前馈残差块处理后送入分类头。
架构优势:该架构的主要思路在于重新处理MD–AD域偏移。CADDNet 并不将驾驶模式的变化单纯视为需要消除的背景噪声,而是将其作为控制参数来调制系统的特征提取。领域门控注入模块允许输入的 EEG 特征能够根据当前驾驶模式进行条件化处理,从而增强了模型的上下文调制能力。
核心算法
为了探索架构设计的合理性,并对模型进行评估,作者在特征提取、统计学检验以及评估方法上进行了系统的建模与评估。
1. 频带功率谱密度计算
作者利用韦尔奇方法估算离散频率下的功率谱。通道 在频带 的对数功率计算式为:
2. 探究交互效应的线性混合效应模型
为了从统计学上提供不同驾驶模式下分心相关 EEG 频谱特征存在模式依赖性变化的证据,作者考虑了个体重复测量结构,并进行了多重比较校正,采用了交互式 LMM:
模型中 用于检验分心效应是否随驾驶模式而变化。基于分析得到的显著交互项,作者提示了简单特征对齐在该任务中的局限性,并解释了 SCL/CORAL 未能提升性能的原因。
3. 选择性预测与风险-覆盖率评估
面向未来实际部署,模型需要在不同置信度水平下呈现可解释的错误风险。作者定义了置信度得分 为分类器的最大 Softmax 后验概率(MSP)。对于目标覆盖率 ,系统截取前 个最高置信度的样本,并通过以下公式评估选择性风险:
算法优势:论文构建了较清晰的分析链条。底层通过 PSD 算法提取频域特征,中间层利用 LMM 统计模型从数据层面提供了“驾驶模式依赖性”的分析证据,顶层则利用 Risk-Coverage 指标为模型的选择性预测表现提供了离线评估依据。这种从频谱特征分析到统计检验,再到离线模型评估的分析链条,体现了较好的研究严密性。
实验验证
作者基于真实道路采集的数据集进行了五折交叉验证,并将同一 trial 的重叠片段分配到同一数据子集,以降低数据泄漏风险。在本文数据集和评估设置下验证了所提方案的有效性。
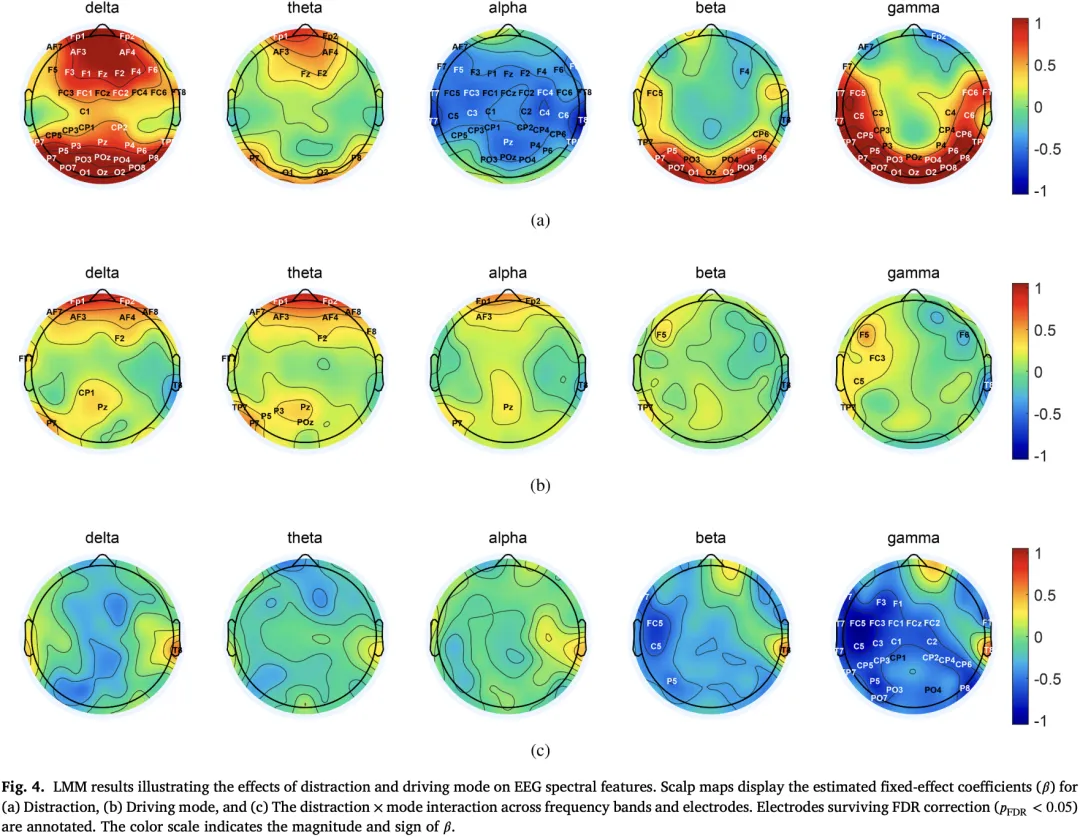
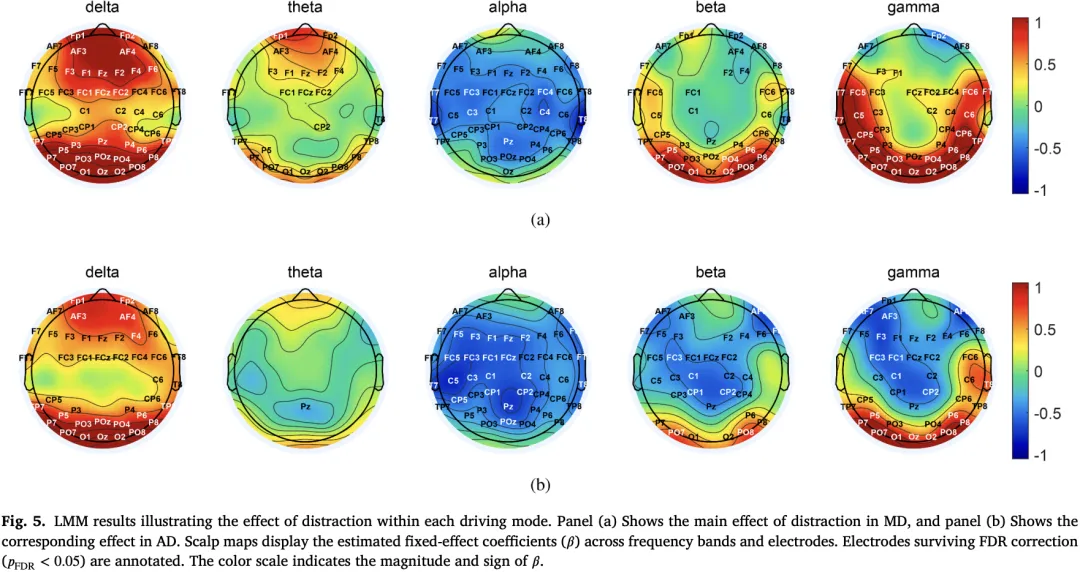
1. 神经表征“模式依赖性”的观察
地形图展示了 LMM 的固定效应系数和FDR校正后的显著电极–频带特征。例如在左颞区,手动驾驶分心时 Beta 波带能量显示升高,而在自动驾驶分心时呈现下降。这一现象显示,分心相关 EEG 表征发生了模式依赖性变化。
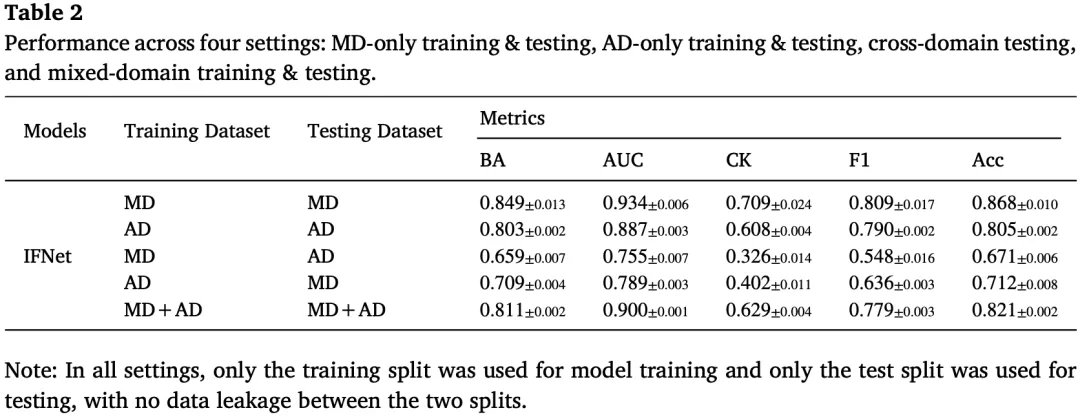
2. 跨域泛化性能测试与基线对比
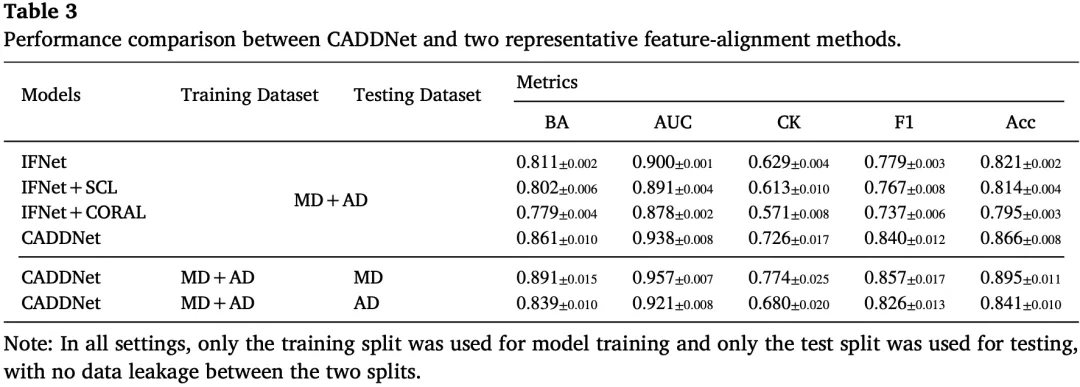
实验结果显示了现有模型在本文真实道路数据集上的跨模式泛化问题。当使用在本文比较的 EEG 架构中表现最好的 IFNet 基线模型仅在手动驾驶(MD)数据上训练,并测试于自动驾驶(AD)数据时,其平衡准确率(BA)从 0.849 降至 0.659,下降约 19.0 个百分点。即便引入 SCL 或 CORAL 等代表性特征对齐/域适应方法,性能未提升,且低于 IFNet 基线。
3. CADDNet 的综合表现与选择性预测
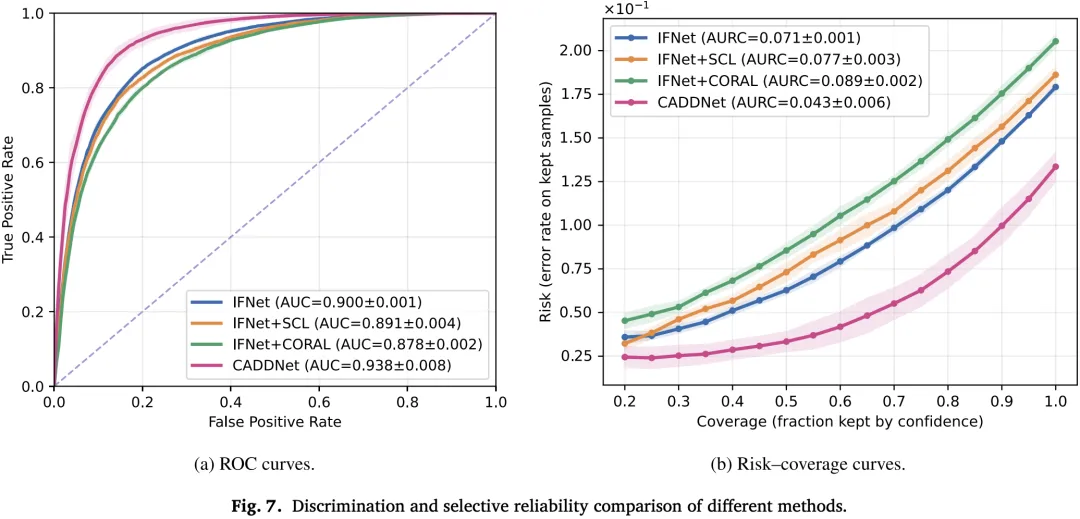
CADDNet 在混合数据集上取得了更高的性能,其平衡准确率(BA)达到 0.861,AUC 提升至 0.938,相比 IFNet、IFNet+SCL 和 IFNet+CORAL 均取得稳定提升。在选择性可靠性分析中,risk–coverage 曲线显示,在相同覆盖率下,CADDNet 通常具有更低的选择性风险,这对于安全关键的驾驶员状态监测系统而言具有潜在参考价值。
4. 潜在空间分布分析
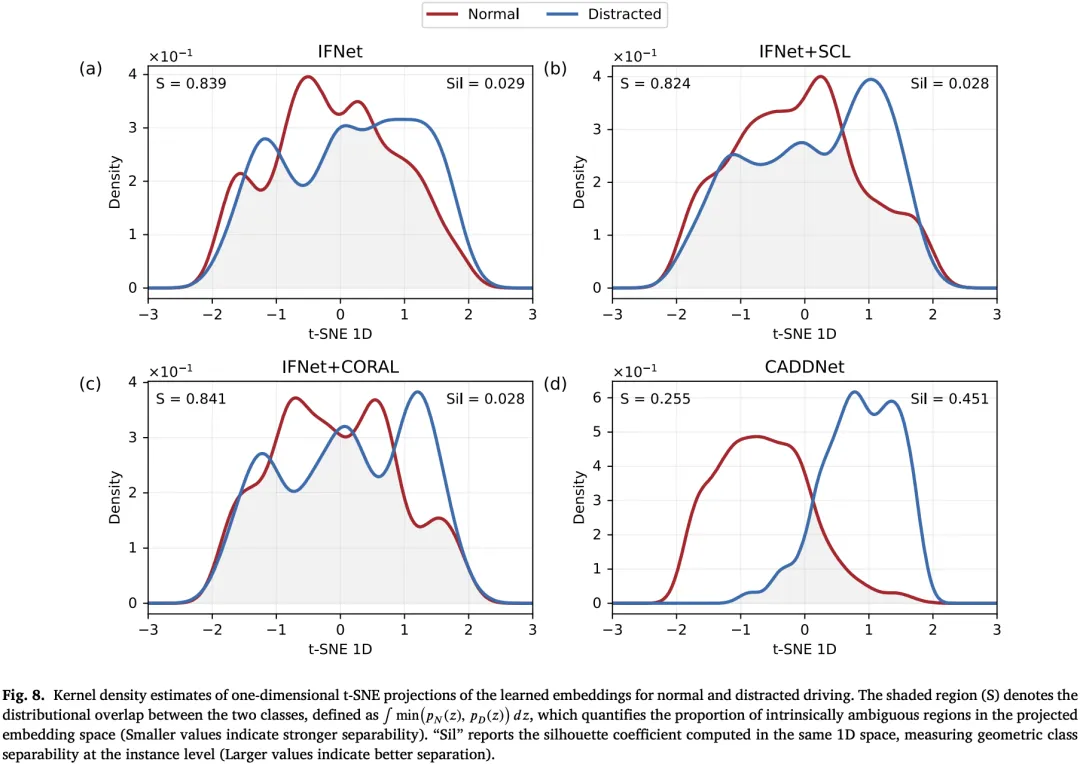
作者利用一维 t-SNE 投影和核密度估计量化了正常与分心状态的分布重叠区域(S)。在一维 t-SNE/KDE 可视化中,传统对齐方法的类间分布重叠更大,而 CADDNet 展现出相对更小的重叠面积(),并取得了更高的轮廓系数(Silhouette coefficient = 0.451),为其更好的表征分离和选择性预测表现提供了辅助证据。
观点引述
以下摘录自论文中的一些有价值的论述,建议大家在撰写智能网联汽车、车联网资源调度、人机协同系统以及边缘智能计算相关论文时参考和引用。
1. 讨论自动驾驶监督状态下的驾驶员认知特征
During MD, the brain operates within a tight sensorimotor loop, continuously coupling perception and action. In contrast, during AD this loop is largely disengaged, and neural processing shifts toward a monitoring state characterized by vigilance and passive information intake.
解析:这对于阐述“为什么在部分自动化或有条件自动化场景中,驾驶员状态监测仍然重要”具有参考价值。它指出了驾驶员在手动控制与自动驾驶监督状态之间角色切换
带来的任务角色转变与认知信息处理层面的变化。正式引用前应回到论文原文逐字核对。
2. 分析特征对齐算法的潜在局限性
These patterns indicate that distraction-related neural modulation is mode-dependent rather than uniform across contexts. This mode dependence helps explain the difficulty of cross-mode generalization and the limited benefit of alignment-based approaches such as SCL and CORAL, which may suppress task-relevant mode-specific structure.
解析:当研究涉及多域数据并遇到简单特征对齐失效时可以参考。该段落提示在模式差异包含任务相关信息时,简单追求域不变表示可能并非最优,可能抑制任务相关的特定结构。
3. 将上下文变量视为“网络调制器”的计算思路
Similarly, the proposed CADDNet treats the driving mode not as a noise factor to be removed, but as a control parameter that modulates the system’s dynamics... ensuring that the EEG features are projected onto the correct integration axis...
解析:对于关注上下文感知 AI 的研究,该表述提供了一种参考框架,展示了如何通过上下文信息来调制模型对 EEG 表征的解释方式,体现了从单一特征提取转向上下文条件化解码的思路探讨。
4. 强调真实道路实验的生态效度
The reproduction of these characteristic spectral-spatial patterns in our on-road experiment indicates that the core neural signatures of cognitive distraction, first identified in controlled laboratory settings, robustly manifest in real-world traffic conditions.
解析:在探讨研究数据的有效性时,这句话强调了真实道路实验提高了研究的生态效度,指出在实验室中发现的部分认知分心 EEG 频谱–空间模式在实际道路条件下得到了再现。
总结展望
本文通过真实道路实车 EEG 实验,研究了手动驾驶与自动驾驶监督状态下认知分心识别的跨模式泛化问题。结果显示,分心相关 EEG 频谱–空间特征具有明显的驾驶模式依赖性,导致直接跨模式迁移时模型性能下降。基于这一发现,作者提出 CADDNet,将驾驶模式作为上下文信息通过门控残差方式注入分心识别网络。
这种“上下文感知 + 门控调制”的设计理念,有望为未来车载驾驶员状态监测和人机协同提供一种潜在技术路径。不过,该方法仍属于离线数据集验证,未来若能解决 EEG 采集便利性、运动伪迹、佩戴舒适性、实时推理和嵌入式平台验证等问题,将进一步推动其在实际应用中的落地。
#人机协同 #驾驶员状态监测 #自动驾驶 #EEG #深度学习 #上下文感知
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
