⚡ 2026综合研究|自动驾驶三维风险评估:融合技术故障、伦理困境与监管框架新体系
📖 导读
自动驾驶可大幅降低人为因素引发的交通事故,但技术迭代同时催生新型复合风险,单一维度评估已无法适配行业发展。本研究依托美国NHTSA事故报告、加州DM自动驾驶接管数据、MIT道德机器数据集以及美/欧/中/日/英五大经济体法规文本,系统性从技术故障、伦理抉择、政策监管三大维度拆解自动驾驶全链路风险。研究证实感知与分类错误是当前首要技术隐患,全球缺乏统一自动驾驶伦理准则且文化差异显著,各国监管规则碎片化、责任划分模糊进一步放大落地不确定性。论文引入蝴蝶结风险模型搭建跨领域分析框架,提出工程标准、伦理规范、制度监管协同的自适应治理方案,为自动驾驶规模化落地提供全域风险研判与治理参考。
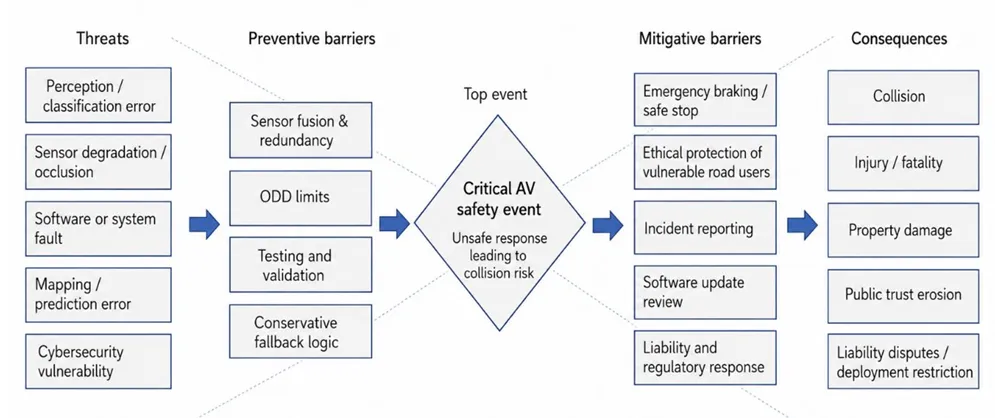
图1:自动驾驶综合风险评估领结模型。
论文核心信息
- 论文题目:Risk Assessment of Autonomous Driving: Integrating Technical Failures, Ethical Dilemmas, and Policy Frameworks
- 作者:Boyi Chen、Shengqin Chu、Zicheng Wang、Brian Baetz、Zhen Gao(加拿大麦克马斯特大学)
- 核心数据:NHTSA 2021-2023累计2400+起ADAS事故、近340起全自动驾驶事故;2020-2023加州DMV头部企业接管里程数据;MIT道德机器4000万+有效问卷、覆盖233个国家;Waymo公开数据显示事故率较人类基准:财产事故降85%、伤亡事故降57%;2021-2024自动驾驶行业融资缩水57%。
- 感知、目标分类错误是自动驾驶最主要技术失效模式,传感器干扰、对抗攻击、恶劣环境会加剧故障风险
- “电车难题”类极端伦理场景实际发生率极低,日常微观伦理设计(车距、车速、避让逻辑)才是安全核心
- 功利论、义务论、公平论三大伦理框架各有优劣,且存在显著跨文化偏好差异,全球统一伦理标准难以落地
- 美/欧/中/日/英监管体系差异巨大,责任界定、运营规则不统一,易形成“监管洼地”
- 技术、伦理、监管三类风险深度耦合,孤立治理无法从根源解决安全与落地难题
- 首次采用蝴蝶结风险模型,串联技术隐患、安全事故、伦理约束、监管处置,构建全域风险分析链路
- 多源公开大数据交叉验证,量化技术可靠性演变规律,区分宏观伦理难题与工程层面微观伦理问题
- 六维对比五大主流经济体监管体系,精准剖析责任、伦理、部署等核心分歧
- 提出跨领域协同治理思路,打破技术、伦理、法律研究壁垒
- 核心主题:自动驾驶风险评估、技术故障分析、AI伦理、全球监管框架、蝴蝶结风险模型
- 核心受众:自动驾驶算法工程师、车企合规人员、交通政策制定者、AI伦理研究者、智能出行行业分析师
❓ 自动驾驶五大核心痛点
- 技术长尾难题:感知与分类故障频发,传感器失效、对抗样本、低光/雨雾等恶劣环境鲁棒性不足,可靠性提升边际递减
- 伦理标准分裂:无全球统一决策准则,不同文化、人群道德偏好差异大,极端两难场景+日常微观伦理双重挑战并存
- 全球监管碎片化:各国运营等级、责任划分、数据规则不一致,跨区域部署难度高,易出现监管套利
- 风险评估片面:行业长期单独评估技术、伦理或法律问题,忽略三者耦合关系,隐患识别不完整
- 行业信心下滑:技术瓶颈+监管模糊+伦理争议叠加,资本退潮,多家头部企业停运项目,规模化进程受阻
🔧 核心真相:四大底层逻辑
1. 感知缺陷是事故主因(真相1)
真实道路场景中,99.5%以上安全风险源于常规感知、预测故障,“电车难题”式极端伦理抉择场景极少;传感器遮挡、算法分类混乱、环境分布偏移是高频失效点。
2. 伦理分两层,工程优先微观设计(真相2)
宏观两难困境社会关注度高,但对实际事故影响极小;车速设定、跟车距离、行人避让策略等日常微观伦理设计,直接决定长期事故概率。三大伦理框架无绝对最优解,需结合地域文化适配。
3. 监管分歧核心是责任界定(真相3)
各国法规在自动驾驶等级许可、事故追责、伦理强制要求上差异最大:美国州级规则松散、欧盟偏保守限速、中国采用试点管控、英国设立专门追责主体,规则差异催生监管洼地。
4. 风险环环相扣,必须协同治理(真相4)
技术短板会让伦理算法无法落地,监管漏洞会纵容技术缺陷与伦理缺失;单一维度整改治标不治本,唯有工程、伦理、监管三位一体才能构建完整安全屏障。
关键内容
1 人类驾驶基准(2018-2023)
2 头部企业自动驾驶接管数据(加州DMV 2020-2023)
3 三大主流伦理框架对比
4 五大经济体监管核心对比
5 蝴蝶结风险模型(全风险链路)
前置防御:传感器冗余、算法校验、场景测试、网络安全防护 → 核心事件:感知/分类故障、软件错误 → 直接后果:碰撞、人员伤亡、财产损失 → 后置管控:紧急制动、事故上报、责任判定、伦理追溯、法规处罚
💬 Q&A
Q1:自动驾驶目前比人类驾驶更安全吗? A:在财产损失、人员受伤事故上,Waymo等头部车型事故率显著低于人类;但致命事故仍需海量里程验证,且技术长尾问题未解决,暂不能完全判定全面更安全。
Q2:“电车难题”是自动驾驶落地的最大伦理障碍吗? A:不是。该类极端场景发生概率极低,日常跟车、避让、车速等微观伦理设计,以及跨文化伦理标准统一,才是核心伦理挑战。
Q3:全球自动驾驶监管最大分歧是什么? A:核心是事故责任划分,其次是自动驾驶运行等级、限速、伦理强制要求;美国碎片化、欧盟偏保守、中英尝试建立统一主体,规则差异造成跨区域落地困难。
Q4:为什么不能只从技术角度优化自动驾驶? A:技术缺陷会让伦理规则无法执行,监管漏洞会放任技术风险;三者深度耦合,单一优化只能解决局部问题,无法构建完整安全体系。
Q5:当前行业发展的核心瓶颈是什么? A:技术长尾故障难以根除、全球伦理与监管标准不统一、资本信心不足三大问题叠加,规模化商用受阻。
🎯 点评
- 核心贡献:首次结合多源权威公开数据,用蝴蝶结模型搭建技术-伦理-监管三维全域风险评估体系,量化自动驾驶可靠性演变,区分宏观伦理争议与工程实际问题,系统梳理全球监管差异,填补跨领域综合风险研究空白。
- 亮点:数据扎实,依托NHTSA、DMV、MIT等权威数据集;回归工程现实,纠正对极端伦理场景的过度关注;全球监管全景对比,落地参考性强;提出协同治理思路,兼顾学术与产业价值。
- 不足:全部采用二手公开数据,无原生实验验证;伦理分析偏向西方学术框架,对亚洲本土道德文化考量不足;未深入剖析车联网网络安全细节;部分企业事故报告存在漏报、标准不统一问题。
🌟 总结金句
自动驾驶不是单纯的技术迭代,而是技术、伦理、法律交织的复杂社会技术系统,唯有打破领域壁垒、协同治理,才能化解新型风险,推动行业稳健落地。
📌 互动引导
你认为自动驾驶规模化最该优先突破的方向是?
● ✅ 感知算法长尾故障优化
● ✅ 全球通用伦理指导准则制定
● ✅ 跨国统一监管规则搭建
● ✅ 车联网网络安全加固
● ✅ 事故责任划分立法完善
欢迎在评论区分享观点 👇
🧩 思考/研究 Idea 彩蛋
- 面向长尾场景的感知容错算法:适合IEEE Transactions on Intelligent Transportation Systems
- 跨文化自适应自动驾驶伦理决策模型:适合AI & Society、Journal of Moral Philosophy
- 跨国自动驾驶监管协同机制研究:适合Transport Policy、法学类顶刊
- 蝴蝶结模型拓展至车联网安全风险评估:适合Computers & Security
- 微观伦理导向的自动驾驶控制策略:适合Autonomous Robots、交通工程期刊