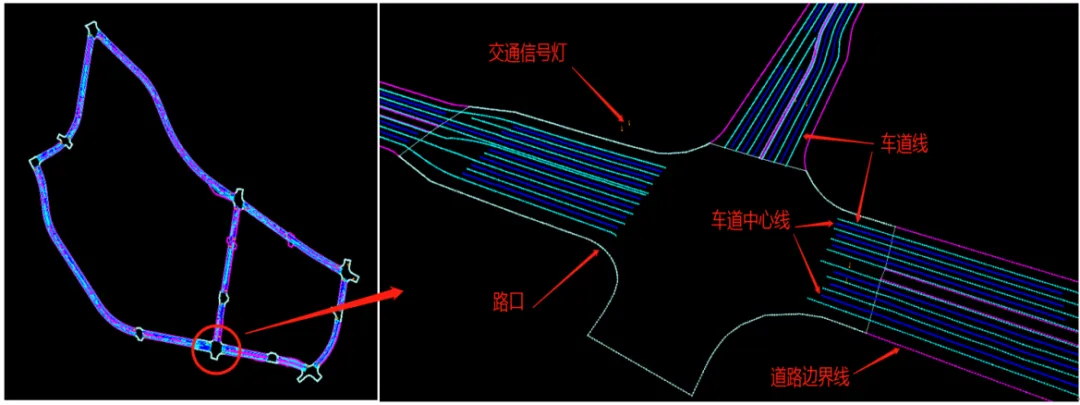
高精地图,是自动驾驶的超级感官——由含有语义信息的车道模型、道路部件、道路属性三类矢量信息,以及用于多传感器定位的特征图层构成。帮助自动驾驶车精准定位自身位置,为决策与路径规划提供所需信息。
高级导航数据生产的挑战
人工采用传统设备采集数据效率低,隧道、市区、停车场等弱GNSS场景定位、成图精度难以达标,传统设备整体精度不足,无法满足自动驾驶厘米级应用要求。
全流程高度依赖人工标注、后处理,人工工作量大、整体效率低下。缺少道路属性、车道链接、交通设施等信息的自动化计算与生成工具,各类属性全靠人工核算、录入,易出错且周期长。
在动态、大规模的复杂道路环境中,如何以可接受的成本,实现高效、高精度的地图生产与更新?
四维远见移动测量方案
针对这些痛点,用户采用四维远见移动测量方案,基于移动测量系统通过实际路段测试,解决了高速移动状态下、大规模带状道路场景中,高精度、高密度、可检索的三维地图数据采集与组织问题,验证了高精地图服务于自动驾驶的可行性。
项目实测案例展示
在某开放道路自动驾驶示范区附近数公里的实际路段进行测试,绝对精度要求10cm,输出WGS84系,3度带投影平面坐标。实现外业40分钟扫描,1.5小时数据解算,1.5小时自动提取,1人1天完成矢量编辑。
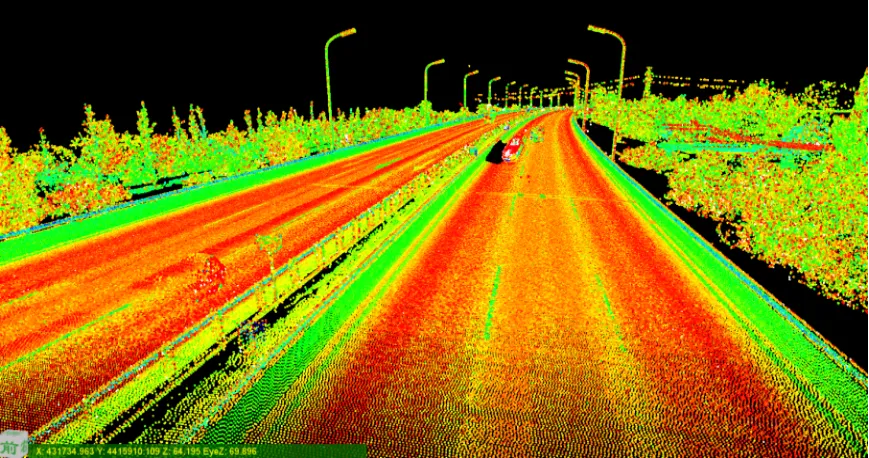
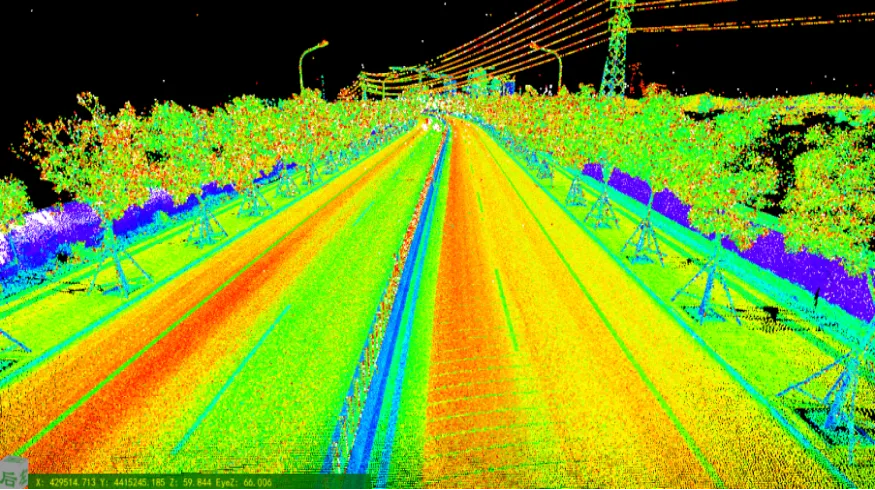
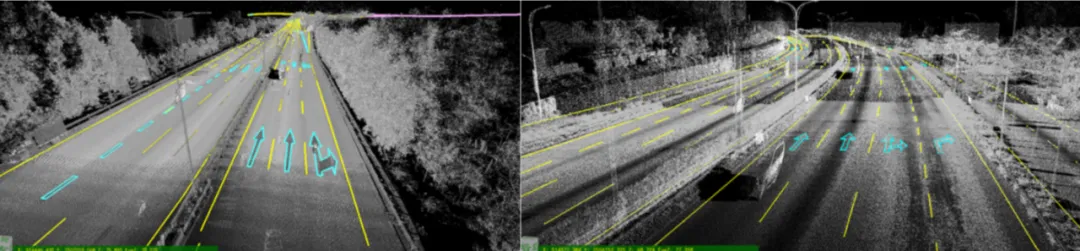
1.高密度点云采集:高密度点云分布,保障厘米级细节还原。
2.高速移动扫描:高频激光转速,配合60km/h左右车速,行距可控,覆盖效率高。
3.多源数据融合:集成激光+IMU+GNSS+里程计+相机,一次性获取位置、姿态、影像与三维点云。
4.近距时高点频设备点距过密:动态抽稀软件,自动优化数据量,避免存储与处理负担。
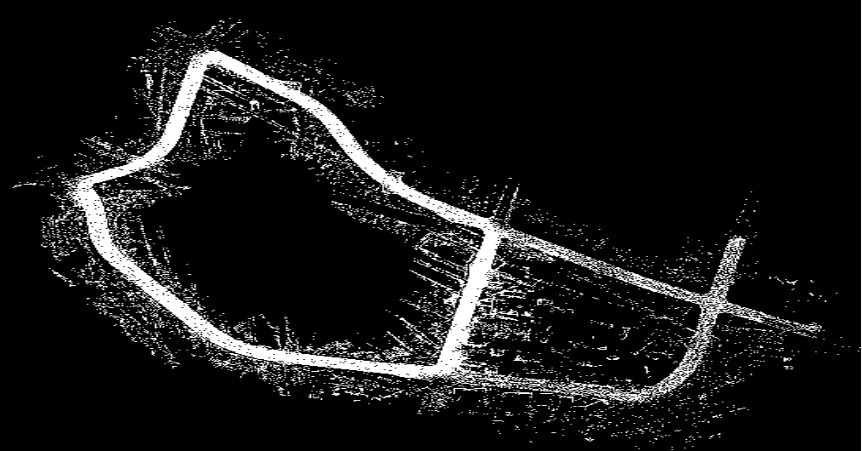
5.自动驾驶快速检索:以十字路口或快速路出入口作为路段边界进行地图数据的切分,以路段为单位进行数据存储和在线搜索。数据存储空间和搜索计算量较小,适用于实测道路的带状地图数据。
6.搭载自研精度优化算法:SLAM算法补足弱GNSS场景精度短板,有效提升弱GNSS区域定位与建图可靠性。
组合导航计算中,原始数据IMU、PC104、GNSS经格式转换与预处理后,通过GNSS差分计算生成轨迹并初判精度,再与IMU、PC104数据融合,输出车行扫描组合轨迹。
将原始数据解析为包含角度、距离、强度等关键信息的结构化数据。通过自研点云生产软件,将原始数据与轨迹数据融合,生成高精度点云。
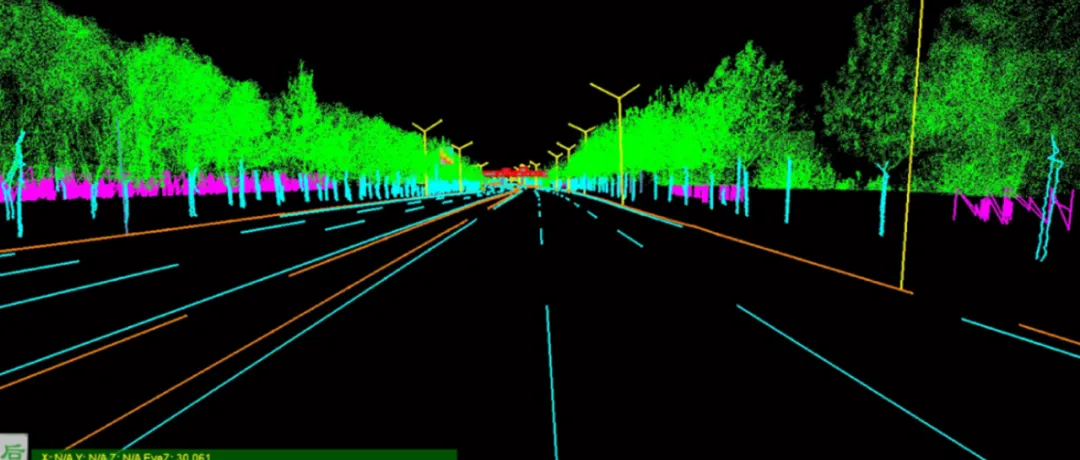
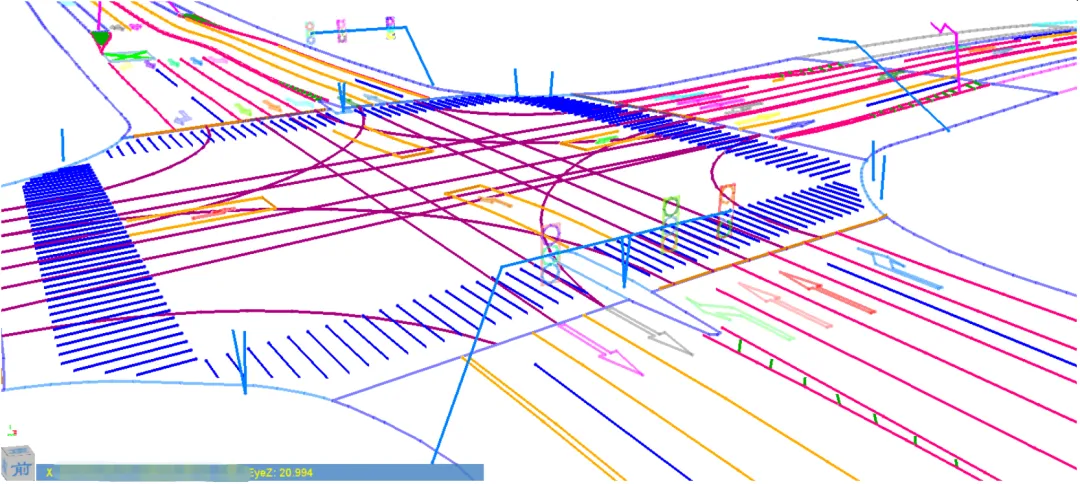
实测项目使用“大一键”道路全要素提取软件,快速生成道路全要素结构化三维矢量。实现一键化从车载点云和全景影像到三维矢量的自动提取,整体正确率和完整率超80%,节省工作量40%。
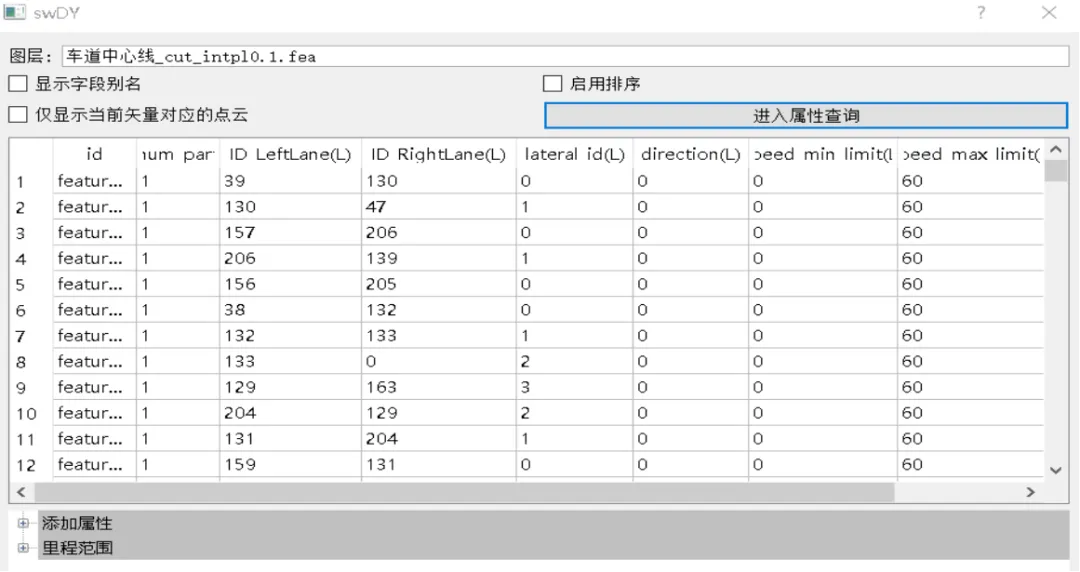
在自动提取的基础上利用自主研发的SWDY点云工作站进行矢量编辑和属性录入。实现智能交互编辑、支持斑马线、分道线、小型标牌、马路牙等嵌入式交互提取。
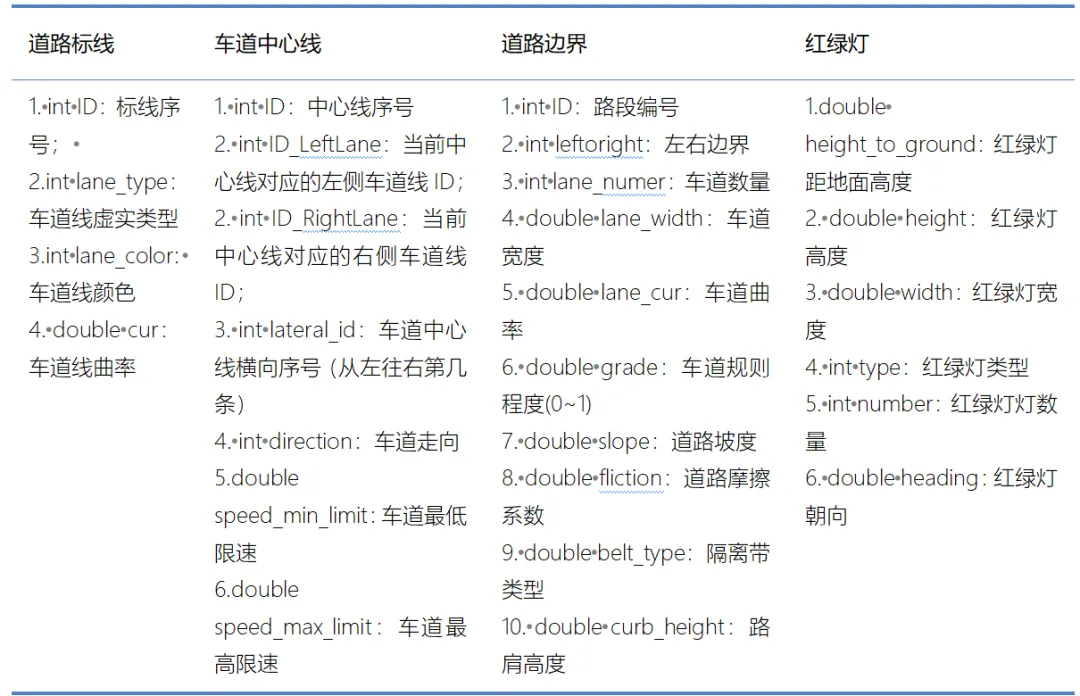
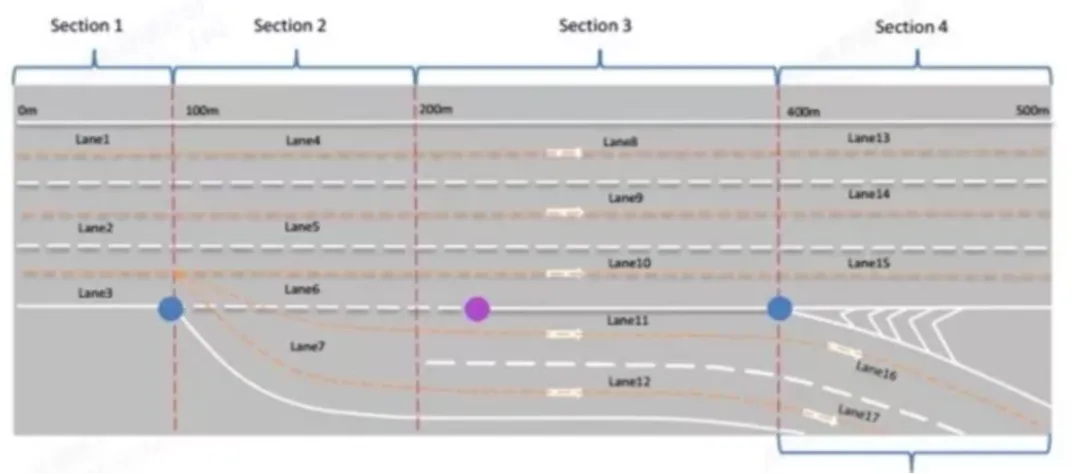
系统内置结构化属性规则与车道拓扑算法,实现全类属性自动化输出:道路基础属性:车道数量、车道曲率、路面限速、标线类型、车道颜色、道路边界等参数自动计算赋值;交通设施属性:红绿灯高度、宽度、类型等信息自动提取生成;车道链接关系:路段划分、车道连通逻辑、LinkID拓扑关系自动生成,无需人工梳理核算。
本项目提交成果包括三维矢量线、道路属性信息、车道链接关系。
整套方案实现硬件高精度采集+AI自动提取+属性智能生成+一体化编辑全链路升级,既解决弱GNSS场景精度不足、传统人工效率低的痛点,又保障了项目质量与交付速度,可高效支撑自动驾驶高精地图等规模化项目落地。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
