ADAS感知层:自动驾驶的“感官系统”
本文仅做行业知识科普,不构成任何投资建议
建议阅读时长:5分钟
本文看点:
五大感知传感器的工作原理与优缺点
主流传感器配置方案
融合感知的技术趋势
一、什么是ADAS感知层?
高级驾驶辅助系统(ADAS)通常分为三层:感知层(环境与车辆状态感知)、决策层(算法规划路径)、执行层(控制刹车、转向、加速)。
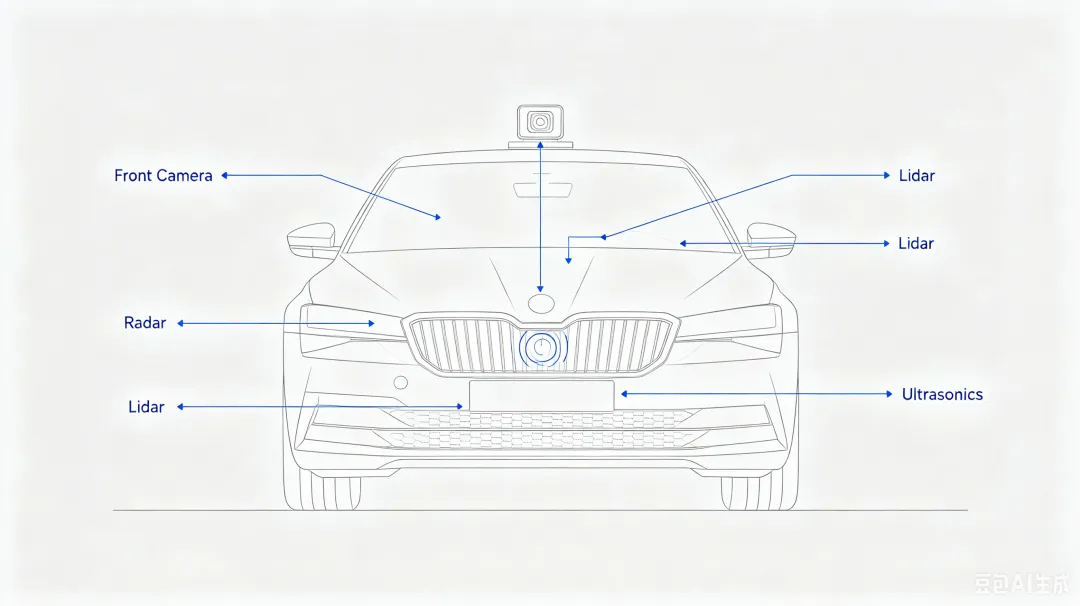
感知层就是车辆的“眼睛、耳朵、皮肤”,负责实时收集周围环境信息——识别车道线、交通标志、行人、其他车辆、障碍物、天气光照等。感知的准确性和鲁棒性直接决定了自动驾驶的安全上限。
二、五大主流传感器
| 传感器 | 原理 | 探测距离 | 优点 | 缺点 |
|---|
| 摄像头 | 光学成像+AI识别 | 30-250米 | 分辨颜色、文字、形状(可识别红绿灯、路牌) | 受光照、雨雾影响大,测距不准 |
| 毫米波雷达 | 发射77/79GHz电磁波,测多普勒频移 | 0.2-250米 | 全天候,直接测速测距,不受雨雾影响 | 无法识别颜色和精细形状 |
| 激光雷达 | 发射激光束,飞行时间测距 | 10-300米 | 高精度3D点云,可直接生成三维模型 | 成本高,受雨雪雾干扰,不能识别颜色 |
| 超声波雷达 | 发射超声波,回声测距 | 0.1-5米 | 成本极低,近距离精准 | 距离短,速度慢 |
| 红外夜视 | 探测物体热辐射 | 50-200米 | 夜间可检测行人、动物 | 成本高,分辨率低,应用较少 |
三、主要传感器的技术细节
3.1 摄像头
分类:前视(单目/双目/三目)、环视(360°全景)、后视、侧视、内置驾驶员监测。
分辨率:从100万像素到800万像素升级中。
双目/三目的优势:双目可模仿人眼计算视差,直接测距;三目(广角/主摄/长焦)覆盖不同视场角。
代表供应商:Mobileye(英特尔)、博世、大陆、维宁尔、经纬恒润、德赛西威。
3.2 毫米波雷达
频段:24GHz(短距,逐渐淘汰)、77GHz(长距,主流)、79GHz(高分辨率)。
功能:自适应巡航(ACC)测距、自动紧急制动(AEB)、盲点监测、后方交通穿行提示。
代表供应商:博世、大陆、安波福、海拉、华为、森思泰克。
3.3 激光雷达
技术路线:机械旋转式(早期,笨重)、MEMS振镜(半固态,主流)、Flash(纯固态)、OPA(光学相控阵,未来)。
线数:16/32/64/96/128/144线,线数越高,点云密度越大。
代表供应商:禾赛科技、速腾聚创、法雷奥、Luminar、Innoviz、华为。
3.4 超声波雷达
四、主流传感器配置方案
| 方案 | 典型代表 | 传感器组合 | 特点 |
|---|
| 纯视觉 | 特斯拉 | 8-12个摄像头+毫米波雷达(早期) → 纯视觉(2021后) | 成本低,依赖算法,受天气影响大 |
| 视觉+雷达融合 | 大部分L2/L2+车型 | 1前视摄像头+1前向毫米波雷达+4环视+12超声波 | 均衡,性价比高 |
| 多传感器融合 | 蔚来、理想、小鹏、华为 | 1-3激光雷达+多摄像头+5-6毫米波雷达+12超声波 | 精度高,冗余安全,成本高 |
| 全冗余L4方案 | Robotaxi(百度Apollo、Waymo) | 5-8激光雷达+10+摄像头+6-8毫米波雷达+多IMU | 极高成本,用于测试运营 |
五、融合感知——从“传感器”到“认知”
每种传感器都有自己的盲区和弱点。摄像头认不出白色卡车车厢(与天空颜色接近),毫米波雷达分不清路牌和行人,激光雷达不识别红绿灯颜色。
融合感知就是通过算法将多个传感器的数据在时间、空间上对齐,取长补短。例如:激光雷达探测到前方100米有障碍物,摄像头识别出那是一个静止的车辆,毫米波雷达测出相对速度为0km/h——系统综合判断需要紧急制动。
融合分为前融合(原始数据融合)和后融合(目标级融合),前者精度更高,但计算量更大。
六、总结
ADAS感知层是一个多传感器协同工作的系统。没有哪种传感器是完美的,真正的自动驾驶依赖的是融合算法的智慧。未来,随着4D成像雷达和固态激光雷达成本下降,高等级自动驾驶的感知冗余将越来越完善。
⚠️ 免责声明:本文仅为行业知识科普,不构成任何投资建议。传感器数据仅为行业普遍参数,不同产品存在差异。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
