⚡️《GraphWorld: Long-Horizon Planning with World Models for End-to-End Autonomous Driving》
📖 导读
在端到端自动驾驶(E2E-AD)的演进中,将感知、预测和规划统一在单一框架内已成为主流。然而,现有的端到端方案普遍陷入了“短视”的困境(Short-horizon planning),极度缺乏对长期时间依赖的建模能力,导致在复杂博弈场景中安全性大打折扣。为了解决这一问题,社区尝试引入世界模型(World Models),但大多数驾驶世界模型严重依赖于像素级的视频生成(Video Generation),不仅计算代价极其高昂,根本无法满足自动驾驶的高频实时推理需求,而且过多关注像素重建而非长时序轨迹推理。
为了彻底跨越这道算力与认知鸿沟,北京交通大学、燕山大学、南洋理工大学等机构的联合团队,重磅推出了 GraphWorld 框架。该研究创新性地摒弃了高耗能的像素级生成,直接在潜在隐空间(Latent space)构建自车中心交互图(Ego-Centric Interaction Graph, ECIG)。通过结合连续流匹配(Flow-Matching)机制指导的潜在世界状态,GraphWorld 在不执行显式多步 rollout 的前提下,赋予了模型强大的长时序“预见”能力。在 nuScenes 6秒长时序规划任务中,它将平均碰撞率史无前例地降低了 19.5%,同时在单卡上实现了超越 DiffusionDrive 的高帧率实时推理!这是端到端自动驾驶向更安全、更高效的世界模型迈进的必读佳作。
📷 核心图表
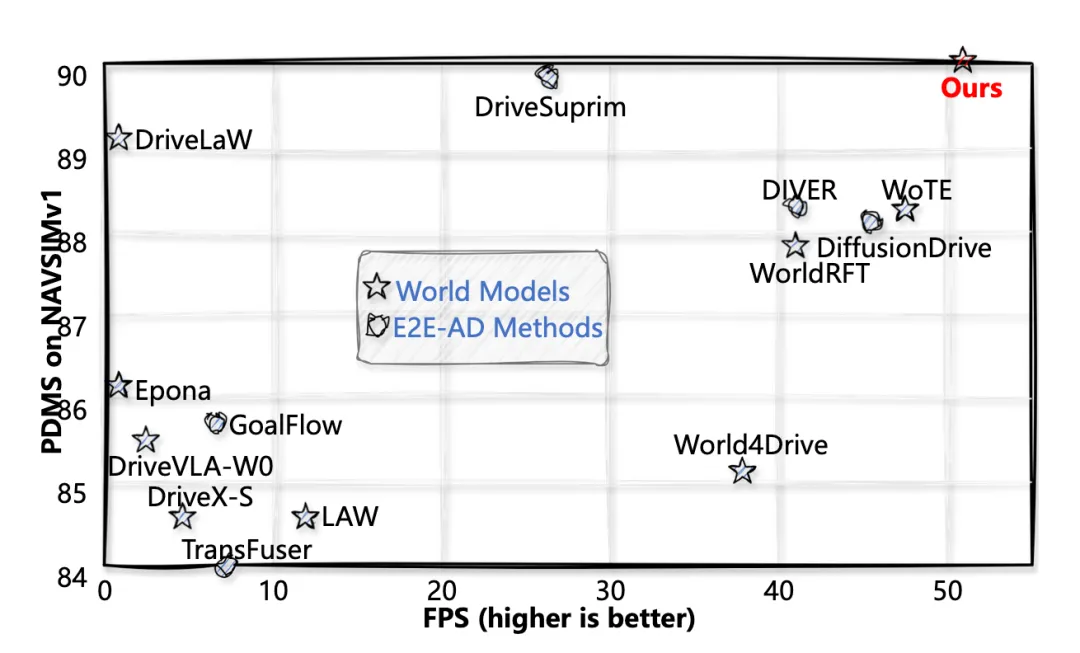
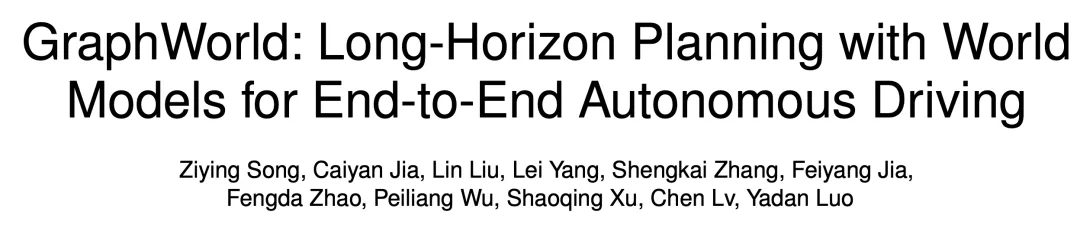
图1 | NAVSIMv1 性能与推理速度 (FPS) 对比看板注:该散点图直观展示了 GraphWorld 在闭环性能与推理效率上的统治力。传统的基于视频生成的世界模型虽然 PDMS 得分较高,但 FPS 极低;而常规端到端方法虽然速度快,但规划得分触顶。GraphWorld(图中右上角红星)完美打破了这一零和博弈,在 PDMS 得分(90.1)和推理速度(约 50 FPS)上均取得了 SOTA 级别的平衡。
图2 | GraphWorld 长时序规划架构蓝图(对应原论文 Figure 2 & 3)资料来源:论文架构解析。与现有模型要么短视(图 a)、要么深陷低效视频生成(图 b)不同,GraphWorld(图 c)先通过 ECIG 从多视角输入中提取高优邻居节点的交互特征,再通过世界状态条件规划(WSCP)模块,利用连续流匹配在隐空间中演化世界状态,从而在保持高帧率的同时实现极其安全的远期规划。
📑 核心信息提炼
文献题目: GraphWorld: Long-Horizon Planning with World Models for End-to-End Autonomous Driving(《GraphWorld:利用世界模型进行端到端自动驾驶长时序规划》)
作者团队: Ziying Song, Caiyan Jia, Lin Liu, Lei Yang, Shengkai Zhang, Feiyang Jia, Fengda Zhao, Peiliang Wu, Shaoqing Xu, Chen Lv, Yadan Luo[c
机构背书: 北京交通大学,燕山大学,南洋理工大学,澳门大学,昆士兰大学
发表平台: arXiv(2026年6月15日)
核心数据/指标:
- 极致安全性:在 nuScenes 的 6 秒长时序规划中,相比纯隐式世界模型 World4Drive,平均碰撞率相对降低了 **19.5%**。
- 闭环性能飞跃:在 Bench2Drive 基准上,将驾驶得分(DS)从 SparseDrive 的 44.54% 大幅提升至 **51.55%**,成功率(SR)从 16.71% 跃升至 **25.47%**。
- 实时部署潜力:在 NAVSIMv1 上比 DiffusionDrive 速度快 **13.3%**,完美满足车载实时计算需求。
核心发现/战绩:
证实了长时序规划的本质不应是“固定生成一条很长的轨迹”,而应是“在模型特征中编码对未来交互动态的深度理解”,以应对高频的重规划(Replanning)。
证明了连续时间流匹配(Flow-Matching)在隐空间世界状态演化上,比离散扩散模型(Diffusion)具有更强的抗误差累积能力。
**自车中心交互图 (ECIG)**:基于空间接近度动态构建,利用跨节点交叉注意力,专门过滤无关车辆的干扰,提纯关键交互特征。
**世界状态条件规划 (WSCP)**:使用流匹配连接当前与目标世界状态,并结合重要性重加权网络(Importance-reweighting network),抑制危险轨迹,提拔安全假设。
核心主题: 端到端自动驾驶 (E2E-AD), 世界模型 (World Models), 长时序规划 (Long-Horizon Planning), 隐空间图表示 (Latent Graph), 流匹配 (Flow-Matching)
核心受众: 自动驾驶规控工程师、端到端大模型架构师、具身智能决策研究员
❓ 行业发展的 4 大“核心痛点”
- 短视规划的“局部最优陷阱”: 大多数 E2E 方案(如 VAD, UniAD)对时序的处理非常短视,遇到复杂的车流博弈时,往往只能做出短期安全但长期注定碰撞的灾难性决策。
- 视频生成世界模型的“算力不可承受之重”: 试图用 Sora 类架构或 DriveDreamer 去预测未来的街景画面,渲染海量与驾驶无关的纹理和光影,推理一帧动辄几秒,根本不可能放在以毫秒计的实车控制芯片上。
- 全局特征建模的“噪音污染”: 在繁华路口,距离自车 50 米外的一辆车对当前决策毫无影响。如果把全局所有智能体的特征强行塞入注意力矩阵,网络会被海量的无效特征淹没,导致交互建模崩溃。
- 自回归 Rollout 的“复合误差漂移”: 现有的隐空间预测模型通常采用离散步长的自回归外推,时间越长,前一步微小的误差越会被放大,导致 4 秒后的预测结果完全脱离物理定律。
🔧 核心真相:终极拆解“GraphWorld 的四大架构逻辑”
1. 空间真相:用 ECIG (自车中心交互图) 实施精准降噪
- 放弃全局盲目注意力!GraphWorld 的 ECIG 模块会根据空间接近度(Spatial proximity)阈值,动态且自适应地筛选出对自车最具威胁的 个关键邻居车辆。
- 随后,模型将自车与邻居构建为星型拓扑图,通过跨节点注意力机制(Cross-node cross-attention)精准抽取高危博弈特征,让模型的运算算力好钢用在刀刃上。
2. 演化真相:用流匹配 (Flow-Matching) 取代离散扩散
- 在世界状态的动态演化上,GraphWorld 引入了条件流匹配机制。
- 它不在隐空间做离散的跳跃预测,而是直接学习一个时间依赖的速度场(Time-dependent velocity field),将“当前世界状态”沿着一条连续轨迹平滑地“传输”到“未来目标世界状态”。这种连续系统更新(单步 Euler update)极大增强了长视野下的稳定性。
3. 决策真相:基于世界先验的“重要性重加权”
- 面向多模态的轨迹输出,并非所有轨迹都安全。WSCP 模块在生成轨迹前,会把隐式世界状态(代表未来会发生什么)作为一种裁判机制。
- 它通过一个极轻量级的 MLP 网络输出置信度得分 ,对那些与未来世界动态相悖(如即将撞车)的轨迹强行降权,而放大那些安全一致的轨迹权重。
4. 训练真相:两阶段的时序强制对齐
- 隐向量如果不受约束极易变成没有物理意义的乱码。团队设计了两阶段监督:第一阶段正常进行端到端多任务训练;第二阶段强制要求 时刻推演出的未来隐状态,必须逼近用 时刻真实观测提取出的真实隐状态。这种“未来对齐”强制世界模型学到了真正的动力学规律。
📊 关键内容与数据看板
表1:自动驾驶端到端规划范式多维横评
| | | | |
|---|
| 纯端到端短视网络 | | | | |
| 视频生成世界模型 | | | | |
| GraphWorld | 稀疏交互图 (ECIG) + 连续流匹配 (FM) | 极高(6秒碰撞率大幅下降) | 高 (匹配实车部署需求) |
表2:nuScenes 6秒极限长时序规划误差及碰撞率表现
| | | | |
|---|
| | | | |
| | | | |
| | | | |
| GraphWorld (Ours) | 1.64 | 2.29 | 0.65 | 1.95 |
注:在常规 E2E 模型(如 UniAD, SparseDrive)在第 5~6 秒时 L2 误差和碰撞率均呈抛物线崩溃时,GraphWorld 利用隐式流匹配机制展现出了极其强硬的抗漂移能力,6秒 L2 误差仅为 2.29 米。
🎯 深度点评
- 核心贡献: 该论文最惊艳的洞察在于:真正的长时序规划,并不意味着要在前端吐出一条极其漫长的刚性轨迹,而是要在模型的“脑海里(隐空间)”编码深刻的未来交互风险预判。 GraphWorld 通过图神经网络和流匹配的降维组合,为端到端模型装上了一个轻量、实时且极度安全的“物理预言家”。
- 亮点总结:① 极致剪裁:通过 ECIG 物理隔离无关邻居,解决了全局 Attention 的算力浪费与注意力坍塌问题。 ② 连续优于离散:实证了 Flow-Matching 在潜状态过渡上的优越性(相较 Diffusion 碰撞率由 2.23% 降至 1.95%),这为动力学建模提供了全新解法。 ③ 鲁棒性底盘:在雾天、雪天等 nuScenes-C 恶劣长尾场景下,依然比强基线表现出更低的碰撞率,证实了“懂物理规则的模型更抗噪”。
- 固定拓扑的死板:目前 ECIG 的邻居选择门槛(距离阈值 )和数量是写死的(Fixed neighbor selection)。在极端密集的城市路口或高速稀疏场景中,固定的拓扑无法完美兼顾计算效率与全量危险感知。
- 单步状态的局限:目前的演化仅依赖单步的世界状态预测(Single-step world-state prediction),未来若能引入多步记忆递归(Multi-step world modeling),其应对极端复杂博弈的能力或将进一步解封。
🌟 总结金句
真正的长时序安全,绝不仅是画出一条漫长的刚性轨迹,而是在高维的潜空间里,提前推演出万物博弈的物理脉络。
📌 互动引导
在端到端自动驾驶(E2E AD)的世界模型竞速赛中,您更看好哪条“预见未来”的技术路线?
✅ A. 隐式图演化派:力挺 GraphWorld!抛弃昂贵的像素渲染,在潜空间里用图网络和流匹配做极速的高维博弈演算!
✅ B. 纯视觉生成派:Sora 路线才是王道!不管算力多大,直接生成未来 5 秒的逼真视频,眼见为实最安心!
✅ C. 强化搜索派:学 AlphaGo,直接在隐空间里做蒙特卡洛树搜索(MCTS),探索出绝对安全的轨迹!
✅ D. 别端到端了:黑盒模型始终无法兜底,自动驾驶还是得老老实实回归“感知-预测-规控”的模块化老路!
欢迎在评论区留下你的真知灼见! 👇
🧩 研究方向展望
针对冲刺 CVPR / ICCV / NeurIPS / ICLR 等顶级会议的自动驾驶、端到端大模型及图神经网络研究者,基于 GraphWorld 提供以下延伸思路:
- 基于时空动态注意力阈值的自适应交互图构建 (Adaptive ECIG via Spatiotemporal Attention): 针对 GraphWorld 目前采用固定距离阈值筛选邻居的局限。探索利用信息瓶颈(Information Bottleneck)或动态注意力机制,让模型自主决定在不同车速和路网拓扑下(如高速公路 vs 拥堵的无保护十字路口)的“有效感受野”。实现计算资源在高危博弈车辆上的动态倾斜,进一步压榨实时推理算力上限,适合投递
CVPR 或 ICRA。 - 融合多步常微分方程的长程记忆演化 (Multi-step ODE Rollout for Latent World Dynamics): 目前的 WSCP 模块依赖单步状态演化。探索在潜空间引入神经 ODE(Neural ODE)或多步连续流匹配算法。让自车不仅能预判最终的目标状态,更能沿着时间轴生成一段连续可微的“高频潜在博弈轨迹场”。在应对 10 秒以上的超长时序持续博弈时,彻底消除离散推演带来的复合误差,适合投递
NeurIPS 或 ICLR。 - 结合图世界先验的端到端可解释性大语言模型 (VLM with Latent Graph World Priors): 探索将 GraphWorld 演化出的未来隐式状态交互图(Latent Graph)作为一种高维结构化特征,跨模态注入到多模态大模型(如 Qwen-VL 或 LLaVA)中。让 VLM 不仅能输出端到端的控制指令,还能基于图模型中的高危节点,用自然语言输出“我之所以减速,是因为右前方的车辆 A 在未来 3 秒有极高的加塞碰撞风险”,实现端到端决策的彻底白盒化,适合投递
CoRL 或 ICCV。

