GNSS + 自动驾驶:定位误差 1 米以内,为什么车端仍然觉得危险?


★📌 本文位置:GNSS观察 · G32 · 自动驾驶风险状态机 · 1米误差到车端降级
关于无线 Battlecard
这里记录无线通信、卫星通信、GNSS、WiFi、5G-A 与测试验证中的工程判断。
如果你希望系统阅读,可从文末合集入口进入;也欢迎关注并星标,方便持续看到后续文章。
开场
定位误差 1 米以内——这个数字放在很多场合都算不错。开阔天空下单点定位通常在 2–5 m;能收敛到 1 m 以内,已经接近车道级定位的入口条件。
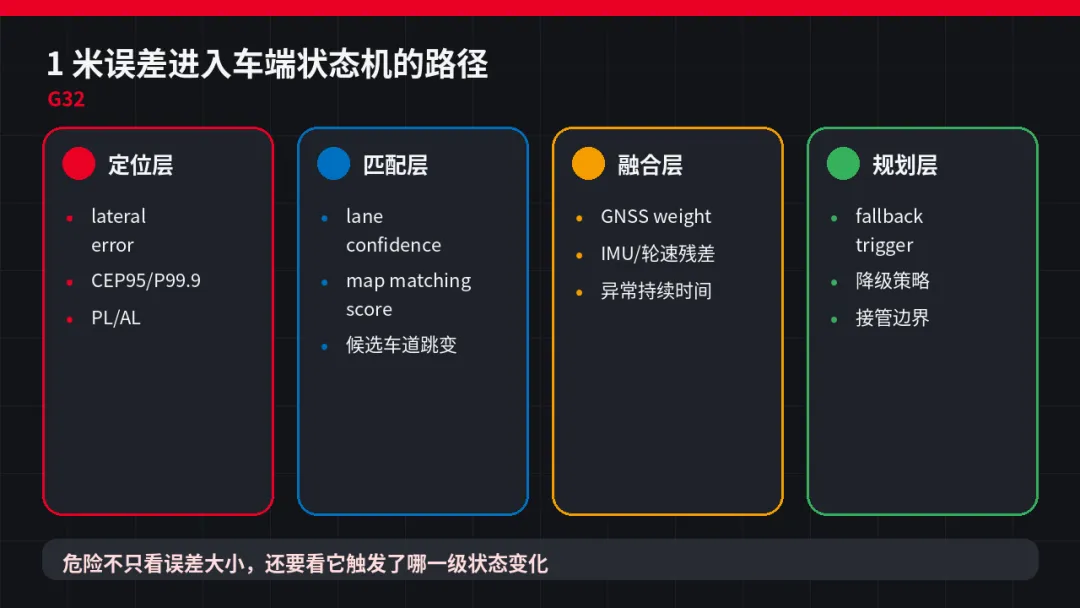
但车端不这么看。车端风险状态机关注的是极端误差和误差的持续时间,而不只看平均统计。横向 1 m 误差,在典型车道宽度 3.5 m 下,相当于车辆偏移车道中心约 28%。这个偏移量本身不一定致命,但在 lane confidence 模块中,它足以触发置信度降级、map matching 判据松动、planning 模块开始准备 fallback 路径。
问题是:从 GNSS 输出 1 m 误差,到车端触发降级,中间隔了几个决策节点?每个节点的阈值和时序约束是什么?这恰恰是 GNSS 定位验证中最容易被跳过的一环——大多数验收报告只汇报定位精度,不汇报链路中各模块的置信响应。
客户对话锚点
核心判断:1 米绝对误差对定位系统来说不算差,但车端风险状态机看的指标是置信区间覆盖范围、误差持续时长、以及 lane confidence 和 map matching 模块的告警状态。
- Lane confidence 模块在横向误差 0.5–2 m 扫频下,置信度从 high 降到 medium 的阈值在哪一行?是否定义了不确定度上界?
- 地图匹配横向残差达到多少时,planning fallback trigger 会被激活?GNSS 权重是否随之降为 0?
- P99.9 横向误差是否已进入 GNSS 系统级验收流程?如果验收只看 RMS,0.1% 的极端跳点由谁兜底?
收束:本文把 1 米误差从米级精度数字重新翻译,定位到车端风险状态机可消费的触发器阈值上。后续文章会继续展开各层触发器的具体标定方法和验证场景设计。
一、1 米误差在车道级决策中的真实位置
定位误差 1 m 这个数字本身,在不同模块里的含义完全不同。
在 GNSS 接收机内部,1 m 是定位解算的统计精度——通常用 RMS 或 CEP 汇报。在定位融合模块里,1 m 是卡尔曼滤波的观测噪声协方差输入。在 lane confidence 模块里,1 m 横向误差是置信度降级的触发边界。在 map matching 模块里,1 m 横偏是道路匹配歧义的判断依据。在 planning 模块里,连续超过 1 m 的横偏是 fallback 准备信号。
同一个数字,经过 5 个模块后含义已完全不同。GNSS 输出的 1 m 是一个统计精度,planning 接收到的 1 m 是一个风险信号。理解这个差异,是设计车端 GNSS 验收条件的第一步。
二、车端风险状态机的三级触发器
从 GNSS 误差到 planning fallback,车端风险状态机通常经过三级判断:
第一级:Lane confidence 降级。 典型阈值在横向误差 0.8–1.2 m。超过此阈值,车道级置信度从 high 降为 medium,融合滤波器开始降低 GNSS 权重。若误差在 1–2 个更新周期内回落到阈值以下,置信度可自动恢复;若持续超限,则进入第二级判断。
第二级:Map matching confidence 告警。 典型阈值在横向残差 1.5 m 附近。地图匹配模块发现 GNSS 轨迹与道路几何的横向偏差超过内部容差,输出告警信号。此级告警通常带有迟滞窗口,避免因单次噪声抖动而产生乒乓效应。
第三级:Planning fallback 触发。 前两级告警持续超过 2–5 s 仍未收敛时,planning 模块进入 fallback 模式:目标车道切换取消、变道抑制、巡航限速或请求人工接管。
表中数字为工程典型值,不同方案商、功能等级、场景下实际阈值会有差异。但规律通用:车端状态机是一个带时序条件的三级链式决策。
三、P99.9 横向误差:被平均指标掩盖的极端风险
平均 RMS 横向误差可以把很多问题平均掉。一条 30 km 的城市路线,99.9% 的时间横向误差小于 1.2 m,但 0.1% 的时间(约对应 30 m 行驶距离)误差达到 2.5 m。RMS 汇报可能是 0.8 m——看起来过得去。
对车端来说,0.1% 的极端跳点不是噪声。在 L2+/L3 功能中,安全要求通常定义 Integrity Risk 在 10⁻⁷–10⁻⁹/h 量级。P99.9 相当于 10⁻³ 的不超界概率,距安全要求还有几个数量级差距——但至少比 RMS 向前迈了一大步。从工程落地角度看,从 RMS 过渡到 P99.9 是当前最可行的第一步。
如果把验收条件从 RMS < 1 m 改成 P99.9 横向误差 < 1.5 m(对应典型车道级 Alert Limit),很多原来通过的场景会暴露。城市峡谷中 1% 的遮挡事件、多路径反射造成的跳点、差分链路延迟后的残留误差——这些在 RMS 中被平滑掉的场景,在 P99.9 统计中原形毕露。
| | | |
|---|
| | | |
| | | |
| | | |
| | | 对应状态机决策窗口,决定是否触发 fallback |
四、横向风险触发链的工程闭环
将前三节的逻辑串联起来,构成一条完整的横向风险触发链:
GNSS 原始观测 → 定位解算(1 m 误差输出)→ 定位融合(与 IMU/轮速联合校验)→ Lane confidence(车道归属置信判断)→ Map matching(道路几何一致性检查)→ Planning(fallback 决策)

这个链路的工程意义在于:每一级都可以定义验收条件,且每一级的条件必须向下兼容。
- GNSS 接收机的验收条件:P99.9 横向误差 < AL(例如 1.5 m)
- 定位融合的验收条件:误差持续时间 < 融合滤波器收敛时间
- Lane confidence 的验收条件:置信度降级率 < 功能安全目标
- Map matching 的验收条件:残差告警率 < 系统可用性目标
- Planning 的验收条件:fallback 触发率 < 整车安全目标
如果某一级条件不满足,问题可能出现在本级的阈值设定上,也可能来自上一级输入的误差分布太宽。排查时应当从链路末端往源头回溯:planning 触发了 fallback → map matching 告警了 → lane confidence 降级了 → GNSS 横向误差的 P99.9 或持续时间超限了。这种逆向排查法在实践中比正向推导更高效。
行动卡
| | | | |
|---|
| 在 0.5–2 m 横向误差扫频下,记录 lane confidence 置信输出 | | | Lane confidence 需与 GNSS 误差分布联合标定,不能只看 Fix 状态 |
| | | | 残差告警不一定是 GNSS 故障,需要区分真误差与地图偏差 |
| 记录从 lane confidence 降级到 fallback 激活的时间差 | | | |
| 在 GNSS 仿真场景中统计 1000+ 历元的横向误差 P99.9 | | | |
| | 持续 > 2 s 触发 map matching 告警 | | |
| 对比 GNSS 与 IMU/轮速/视觉的横向轨迹偏差 | | GNSS 与视觉车道线偏差漂移但 Fix 状态不变 | |
工程判断
1 米误差与车端降级之间,至少隔着三层判断:lane confidence 是否接受、map matching 是否告警、planning 是否 fallback。三个模块各有自己的阈值、置信区间和时序约束。
把 1 米误差放到这个链路中看,核心问题从「1 m 能不能用」转变为「在多少比例的工况下、持续多长时间、会不会触发哪一级降级」。对验证团队来说,这意味着验收场景需要覆盖误差分布的全貌,而非仅汇报一个平均值。
定位系统需要交付的,是带风险标签的置信边界,而非单纯的精度数字。P99.9 横向误差、误差持续时间分布、各级置信度告警率——这些指标比 RMS 更接近车端安全语言,也才是 GNSS 从高精度走向可信定位的真正门槛。
延伸阅读:无线 Battlecard 系列合集
如果你对无线通信、卫星通信、GNSS、WiFi 8、5G-A 和测试验证方法感兴趣,可以继续阅读下面几个系列:
如果对你有用,欢迎转发给同行朋友
本文为个人技术分享,不代表任何雇主立场。文中涉及的产品/方案名称均为业内公开信息。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
