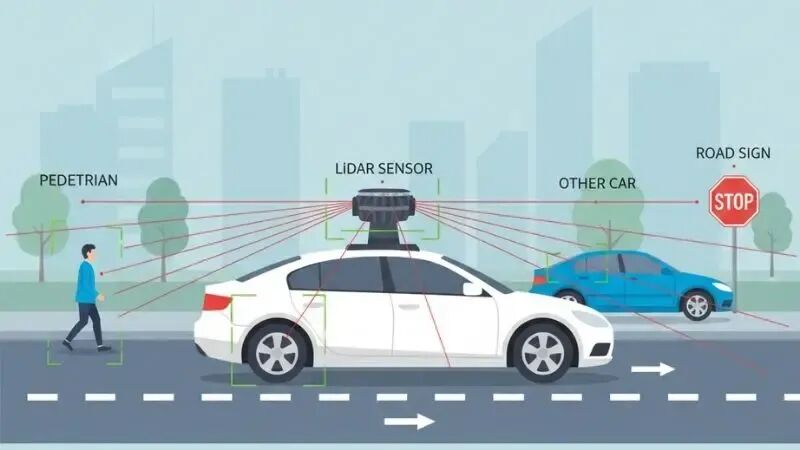
很多人第一次听到“激光雷达”这个词,都会把它和科幻电影联系在一起:车顶上转来转去的传感器、不断扫描道路环境、像给汽车装上“第三只眼”。
但如果把滤镜拿掉,激光雷达的本质其实很朴素——它是一种让汽车“看清世界”的测距设备。它不负责做决定,却决定了自动驾驶系统能不能更准确地理解周围环境。某种意义上说,激光雷达不是自动驾驶的全部,但它很可能是自动驾驶从“能跑”走向“真正可靠”的关键拼图。
这篇文章,我们就聊清楚三个问题:
一、激光雷达到底是什么?
激光雷达,英文是 LiDAR,完整说法是 Light Detection and Ranging,也就是“光探测与测距”。
它的工作原理并不复杂:
可以把它理解成一种“用光来量距离的高精度尺子”。
和传统摄像头相比,激光雷达有一个很大的特点:它不是只“看颜色和纹理”,而是直接获取空间结构和距离信息。也就是说,摄像头看到的是“这像一辆车”,而激光雷达更擅长回答“这辆车具体在几米外、轮廓有多大、运动趋势怎样”。
这也是为什么很多业内人士会把激光雷达称为自动驾驶的“空间感知核心传感器”。
二、激光雷达、摄像头、毫米波雷达分别装在哪里?有什么区别?
自动驾驶不是只靠一个传感器“单打独斗”,而是靠多种感知硬件协同工作。对一辆智能汽车来说,最核心的三类感知硬件,通常就是摄像头、毫米波雷达和激光雷达。
很多人会把它们混在一起理解,但实际上,这三类传感器的位置、能力边界和分工都不一样。
1、摄像头一般装在哪里?主要看什么?
摄像头是目前车上数量最多、分布最广的感知硬件之一,常见位置包括:
前挡风玻璃上方:负责前向主视觉感知;
外后视镜附近或车身侧面:负责侧向环境识别;
车尾:负责倒车影像、后向识别;
车身四周:配合形成360 全景影像;
摄像头最擅长的,是识别视觉语义信息。比如:
车道线;
红绿灯;
交通标志;
行人、自行车、汽车的外观特征;
道路纹理和场景细节;
可以说,摄像头最像人的眼睛。它最大的优势,是“看得懂画面内容”,但短板也很明显:它更依赖光线条件,遇到逆光、炫光、夜间弱光、雨雾遮挡时,稳定性会受到影响。
2、毫米波雷达一般装在哪里?主要看什么?
毫米波雷达和激光雷达不是一回事,它属于电磁波雷达,常见安装位置包括:
前保险杠内部:负责前向测距和测速;
车尾保险杠两侧:负责后向和侧后方来车监测;
车身四角:用于盲区监测、变道辅助、后碰撞预警等;
毫米波雷达最擅长的是两件事:
所以它在这些功能里非常关键:
ACC 自适应巡航;
AEB 自动紧急制动;
BSD 盲区监测;
后向横穿预警;
高速跟车和碰撞预警;
它的优势在于对雨、雾、灰尘、黑夜等恶劣环境适应性更强,抗天气干扰能力通常优于摄像头和激光雷达。
但它的短板也很明确:它能很好地知道“前方有东西、距离多远、速度多快”,却不太擅长精细识别“那到底是什么、轮廓具体长什么样”。
3、激光雷达一般装在哪里?主要看什么?
激光雷达目前在量产车上的常见位置包括:
车顶前部;
前挡风玻璃上沿;
前翼子板两侧;
前脸或灯组附近;
它的核心任务,不是识别颜色和纹理,而是精准获取空间结构信息,也就是:
目标距离;
三维轮廓;
道路边界;
障碍物形状;
周围环境的空间关系;
如果说摄像头擅长“看懂画面”,毫米波雷达擅长“测距离和测速”,那么激光雷达最擅长的,就是“把周围世界还原成一个高精度三维空间模型”。
4、三者最大的区别,到底是什么?
如果用一句尽量直白的话来概括:
摄像头:更像人的眼睛,负责“看见并识别内容”;
毫米波雷达:更像一个抗干扰能力很强的测速测距仪,负责“测距离、测速度”;
激光雷达:更像三维扫描仪,负责“看清空间结构和障碍物轮廓”。
它们各自的典型特点也很鲜明:
摄像头信息量大、成本较低、语义识别强,但更受光线影响;
毫米波雷达抗恶劣天气能力强、测速能力突出,但分辨物体细节能力有限;
激光雷达空间精度高、三维感知强,但成本和系统复杂度通常更高;
5、为什么自动驾驶越来越强调三者融合?
原因很简单:没有任何一种传感器是万能的。
摄像头能识别红绿灯,但夜里逆光时可能受影响;毫米波雷达能在雨雾中稳定工作,但不容易分清障碍物的精细轮廓;激光雷达能还原三维空间,但也会受到成本、天气和整车架构的约束。
真正成熟的自动驾驶系统,不会押注某一个单一传感器,而是尽量把三者的优势叠加起来:
用摄像头理解交通规则和场景语义;
用毫米波雷达提供稳定的距离、速度信息;
用激光雷达补足三维空间感知和异形障碍物识别;
这也是为什么现在越来越多高阶智能驾驶方案,都在强调“多传感器融合”。因为本质上,自动驾驶拼的不是某一个硬件有多强,而是整套系统在复杂真实道路里是否足够稳定、足够可靠。
三、激光雷达的优势在哪?
过去几年,围绕自动驾驶有一场非常典型的路线之争:
为什么激光雷达会被越来越多车企重新重视?核心原因有四个。
摄像头擅长识别红绿灯、车道线、交通标识、行人姿态,但摄像头获取距离,本质上依赖算法估算,尤其在单目视觉方案中,对距离和深度的判断会更依赖训练数据和模型能力。
激光雷达不一样,它的核心输出之一就是距离信息,而且精度很高。这意味着系统能更直接地知道:
前方障碍物离我多远;
左侧有一辆车,是靠近还是远离;
路边那个东西到底是塑料袋,还是一个低矮障碍物;
对自动驾驶来说,这种“直接测出来”的能力,往往比“推测出来”更可靠。
摄像头本质上依赖环境光,逆光、强反射、夜间弱光、隧道明暗切换,都会对识别效果造成影响。
激光雷达主动发光,受外部光照变化影响相对更小。虽然它也不是完全不受天气影响,但在夜间、暗光、复杂明暗环境中,通常能提供更稳定的三维轮廓信息。
这对于高速 NOA、城市领航辅助这类场景尤其重要,因为车辆速度越高,对感知稳定性的要求就越高。
自动驾驶最怕的不是标准场景,而是那些“不按套路出牌”的目标。
比如:
掉落在路上的轮胎;
突然出现的纸箱;
倒地的共享单车;
施工围挡前伸出的杂物;
低矮但足以造成剐蹭的障碍物;
摄像头对这类物体的识别,很依赖训练样本是否足够覆盖。而激光雷达即便“不认识它是什么”,也可以先知道“那里确实有一个立体物体存在”。
这会显著提升系统对未知障碍物的保守性和安全冗余。
智能驾驶走向量产,不能只靠“平均表现不错”,而要尽可能避免极端失误。
冗余的意义在于:当一个传感器失效、误判或者被干扰时,另一个传感器还能兜底。
摄像头、毫米波雷达、超声波、激光雷达,各自都有优缺点。把不同类型传感器组合起来,能让系统对世界的理解更完整。
从工程角度看,激光雷达最大的现实价值,不一定是“让车更聪明”,而是“让车在关键时刻更不容易犯大错”。
四、激光雷达会怎样改变自动驾驶?
如果说过去的自动驾驶,更像是在努力证明“机器也能开车”,那么激光雷达推动的,是自动驾驶进入“更可靠、更可控、更接近规模化应用”的阶段。
具体来看,它至少会从五个层面改变行业。
今天很多消费者接触到的,并不是完全无人驾驶,而是 L2+、接近 L3 体验的高阶辅助驾驶:
高速 NOA;
城市 NOA;
自动泊车;
记忆泊车;
窄路通行;
复杂匝道处理;
这些功能对感知精度要求很高。尤其是在中国城市道路环境下,交通参与者密集、规则动态变化快,仅靠视觉系统往往需要投入极高的数据训练成本,且仍可能在一些边缘场景中表现不稳。
激光雷达加入后,系统对车道边界、立体障碍物、切入车辆、路口复杂结构的理解会更稳。这直接带来的变化,不是宣传层面的“更先进”,而是用户实际感受到的:
接管次数减少;
急刹和犹豫变少;
夜间表现更稳定;
复杂场景通过率更高;
换句话说,激光雷达有望让高阶辅助驾驶从“能用”变成“敢常用”。
真正难的从来不是高速,而是城市。
城市道路里有大量非结构化元素:行人、自行车、电动车、临停车辆、突然变道、施工改道、狭窄路口、复杂光影……这类环境对三维空间理解能力要求极高。
激光雷达的优势,是能更准确还原道路空间结构。对 Robotaxi、无人配送、无人物流等场景来说,这种能力尤其关键。
因为商用自动驾驶不能只追求“跑起来”,而要追求:
安全阈值足够高;
可解释性更强;
运维和责任界定更清晰;
在复杂城区能长期稳定运行;
未来几年,激光雷达最先深刻改变的,可能不是所有私家车,而是那些对安全冗余和稳定性要求更高的自动驾驶运营车辆。
激光雷达并不是单独装一个传感器那么简单,它会反过来推动整个智能驾驶架构升级。
因为激光雷达会带来海量三维数据,这要求车端具备更强的:
算力平台;
数据融合能力;
实时处理能力;
感知算法效率;
车规级可靠性设计;
也就是说,车企一旦选择激光雷达路线,背后通常意味着它在智能驾驶域控制器、中央计算平台、融合感知算法、软件架构方面都要同步进化。
这会加速汽车从“机械产品”向“软件定义汽车”转型。
过去阻碍激光雷达上车的最大原因之一,就是贵。
早期机械式激光雷达价格高得惊人,根本不可能大规模进入乘用车市场。但这几年,随着半固态、固态方案推进,以及供应链成熟,激光雷达成本已经明显下降。
行业最关键的变化不是“它已经便宜到像摄像头一样”,而是“它开始进入主流车型可以接受的成本区间”。
一旦上车规模继续扩大,供应链会进一步成熟,成本还会继续下降。这个过程很像当年的毫米波雷达、车载摄像头和大屏座舱:
先在高端车型搭载;
再在中高端车型普及;
最终进入更大范围市场;
当激光雷达不再是少数旗舰车型的专属配置,它对自动驾驶的影响就会从“技术展示”变成“行业基础设施”。
技术能不能被接受,不只看参数,还看用户心理。
对于很多普通用户来说,他们未必能分清 BEV、Occupancy Network、端到端大模型这些技术词,但他们能直观理解一件事:
“车上多了一个能扫描周围空间的传感器,似乎更安全。”
这种认知未必完全等同于真实安全水平,但它会影响消费者购买决策,也会推动车企在宣传和产品定义上进一步重视感知硬件。
从市场角度看,激光雷达已经不只是一个技术零部件,而是智能驾驶能力的重要标签之一。
五、激光雷达是不是万能答案?
也不能神化它。
激光雷达很重要,但它不是自动驾驶的“银弹”。
第一、它也有短板
激光雷达在大雾、暴雨、扬尘等极端天气下,性能同样会受到影响。部分材质对激光反射特性特殊,也可能影响识别效果。
第二、它会增加系统复杂度
增加一个核心传感器,意味着硬件、标定、清洁、散热、算法融合、故障诊断都要更复杂。工程难度并不会因为加了激光雷达就自动降低。
第三、它不能代替算法能力
再好的传感器,也只是提供输入。真正决定自动驾驶上限的,仍然是整套软件系统如何理解数据、如何做预测、如何决策。
所以,激光雷达的正确定位,不是“装上就自动驾驶无敌”,而是“它为自动驾驶提供了更高质量、更高冗余的感知基础”。
六、未来几年,激光雷达会走向哪里?
从产业趋势看,未来激光雷达大概率会朝三个方向发展。
成本继续下降,是它大规模普及的前提。谁能把性能、可靠性和成本平衡做得更好,谁就更有机会进入主流车企供应链。
早期车顶“鼓包式”激光雷达对设计影响较大,而现在越来越多车型把激光雷达集成到前挡风玻璃上沿、前翼子板、车头灯组附近,整车设计会更协调。
未来它会越来越像一颗普通车规传感器,而不是夸张的外露设备。
未来的自动驾驶不会简单区分“这是摄像头方案”“这是激光雷达方案”,而会越来越强调多源融合和系统级协同。
真正成熟的智能驾驶,一定不是某一个传感器单打独斗,而是不同传感器各司其职,让整车在各种场景下都具备足够稳定的感知能力。
七、激光雷达改变的,不只是汽车看路的方式
激光雷达真正改变自动驾驶的地方,不在于它让汽车“看得更炫”,而在于它让机器第一次更接近人类驾驶中最重要的一种能力——对真实三维世界的稳定理解。
过去,自动驾驶更多是在和规则、地图、算法较劲;未来,自动驾驶真正要赢,必须先把“看见世界”这件事做扎实。
而激光雷达,恰恰就是把这件事往前推了一大步。
它不会一夜之间让所有车变成无人驾驶汽车,但它会明显缩短从“辅助驾驶”走向“更高阶自动驾驶”的距离。
从这个意义上说,激光雷达并不只是一个零部件升级,它更像是自动驾驶走向成熟过程中的一次基础能力跃迁。
对消费者来说,这意味着更稳定的智能驾驶体验;对车企来说,这意味着新的技术分水岭;对整个行业来说,这意味着自动驾驶终于开始从“讲故事”走向“拼落地”。
而这,可能才是激光雷达最值得关注的地方。




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
