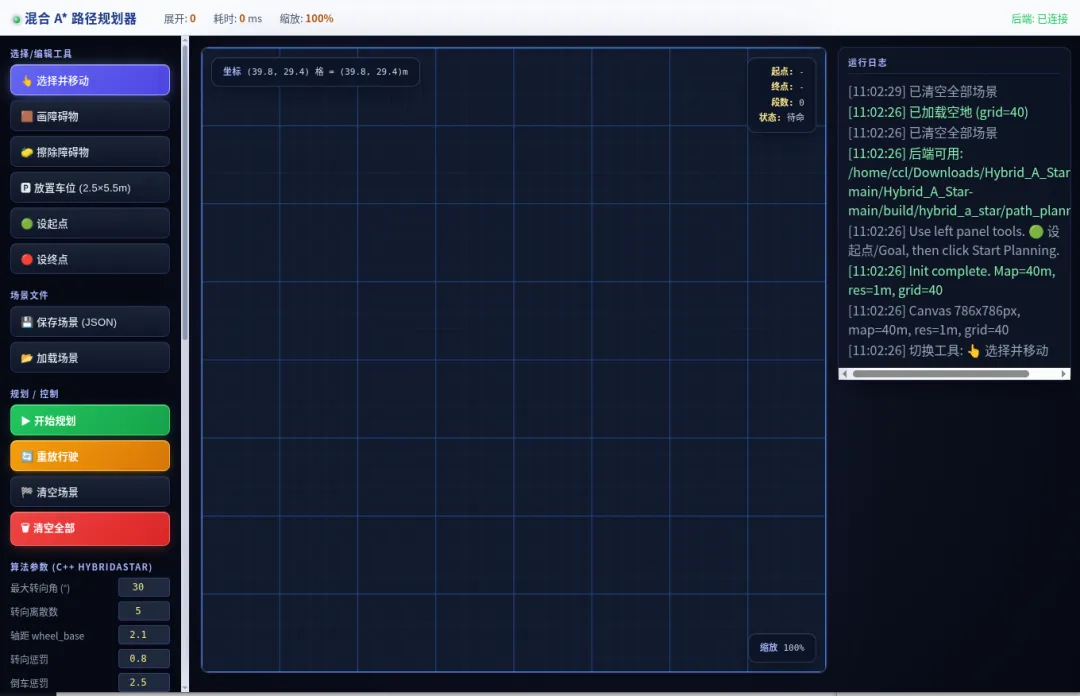
大家好,我是橙子,我们在算法开发过程中,算法开发人员完成编码后,往往需要进行台架模拟,避免直接上实车验证出现基础的bug白白浪费时间,一款合适的自测验证工具就显得重要,今天就为大家分享一个基于Web的前后端分离的路径规划仿真快速调试平台。关键词:路径规划、仿真、自动驾驶、前后端分离,混合A星· 场景编辑器(画障碍 / 放车位 / 设起终点 / 拖动调整)
· Canvas 2D 绘制 + 动画
· 保存/加载 JSON 场景文件
· 车辆、车位、起点/终点、障碍物数据模型
· 接收 JSON 场景 → 转换为 C++ 二进制输入
· 解析 C++ 输出 → 转换回 JSON
· 障碍物膨胀(inflate_radius)
· Hybrid A*+ Reeds-Shepp
· 状态: (x, y, θ) 栅格 + 角度离散化
· 动作: 前轮最大转角 × 档位(正/倒车)
· 碰撞检测: 矩形车辆轮廓
2.平台功能:
1.前端和后端完全分离,可快速移植和替换后端代码
2.支持自定义栅格地图和障碍物,地图支持放大缩小观测
3.自定义车辆起点和目标终点
平台适用于研究自动泊车及混合A星算法开发的工程师,针对混合A星算法做了进一步优化以上为运行的部分画面,当然还有很多不完美的地方,还需要持续优化,关注我,后续将分享混合A星算法在工程落地中有哪些真正的优化方向!点赞+关注,私信我赠送平台完整源码,一起学习进步鸭~
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
