亲爱的读者们,您是否在寻找某个特定的数据集,用于研究或项目实践?欢迎您在评论区留言,或者通过公众号私信告诉我,您想要的数据集的类型主题。小编会竭尽全力为您寻找,并在找到后第一时间与您分享。 目标检测开源数据集是计算机视觉领域的重要基石,支撑目标检测任务的算法研发、模型训练与性能评估,兼顾样本的丰富性、场景的覆盖性与应用的通用性。它包含海量标注精细的图像或视频样本,覆盖日常场景(如行人、车辆、家具)、自然场景(如动物、植物、地形)、工业场景(如机械零件、生产流水线)等数十类通用目标,也涵盖医疗场景(如血细胞、病灶区域)、遥感场景(如建筑、农田、舰船)、自动驾驶场景(如交通标志、障碍物)等专业领域目标。优质的目标检测开源数据集不仅样本数量充足、场景多样性强,还具备精准的目标边界框标注(部分含目标类别、姿态、遮挡状态等属性信息),并合理划分为训练集、验证集与测试集,能够有效支撑算法创新与模型优化,广泛用于目标检测模型开发、AI 产品(如智能监控、自动驾驶系统、医疗诊断设备)落地与学术研究(如算法性能对比、新方法验证),为计算机视觉技术从理论研究走向实际应用提供关键数据支撑。
目标检测开源数据集是计算机视觉领域的重要基石,支撑目标检测任务的算法研发、模型训练与性能评估,兼顾样本的丰富性、场景的覆盖性与应用的通用性。它包含海量标注精细的图像或视频样本,覆盖日常场景(如行人、车辆、家具)、自然场景(如动物、植物、地形)、工业场景(如机械零件、生产流水线)等数十类通用目标,也涵盖医疗场景(如血细胞、病灶区域)、遥感场景(如建筑、农田、舰船)、自动驾驶场景(如交通标志、障碍物)等专业领域目标。优质的目标检测开源数据集不仅样本数量充足、场景多样性强,还具备精准的目标边界框标注(部分含目标类别、姿态、遮挡状态等属性信息),并合理划分为训练集、验证集与测试集,能够有效支撑算法创新与模型优化,广泛用于目标检测模型开发、AI 产品(如智能监控、自动驾驶系统、医疗诊断设备)落地与学术研究(如算法性能对比、新方法验证),为计算机视觉技术从理论研究走向实际应用提供关键数据支撑。1、小程序(打开小程序,快速查找开源数据集)
2、背景介绍
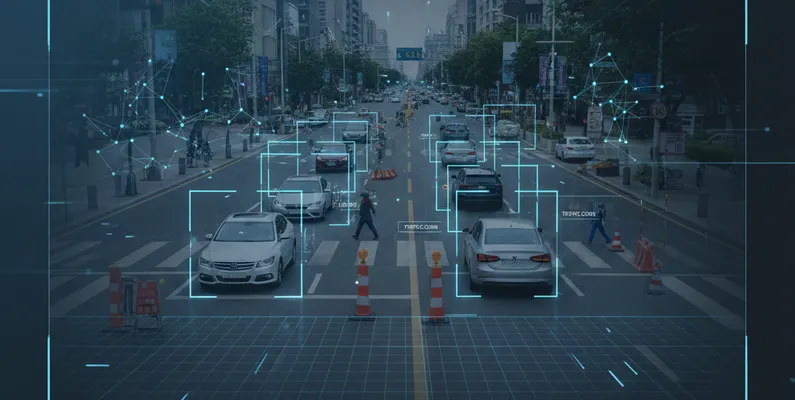
交通场景目标检测的精度与实时响应速度,直接决定了自动驾驶车辆的环境感知能力与行驶决策的安全性,融合道路场景特征基线数据库、复杂路况适配模型及目标类别差异化识别算法,可实现biker、car、pedestrian、trafficLight、trafficLight-Green、trafficLight-GreenLeft、trafficLight-Red、trafficLight-RedLeft、trafficLight-Yellow、trafficLight-YellowLeft、truck十二类核心目标的精准判别 —— 在车载摄像头、激光雷达及毫米波雷达获取的道路场景数据中,十二类目标因形态特征、运动轨迹与交互模式差异,呈现出 “专属外观结构特征 + 动态行为空域格局” 的观测特点:biker目标表现为 “两轮交通工具载体、人体与车辆绑定运动、车身轮廓窄且高度与成年人接近、伴随骑行姿态的肢体摆动”;car目标呈现 “四轮封闭式车身结构、外观尺寸中等且轮廓规整、行驶轨迹平滑连续、与周边目标保持安全车距的常规交互”;pedestrian目标则突出 “无交通工具承载的人体形态、肢体动作灵活多变、行走速度缓慢且轨迹随机性强、易出现在斑马线、路口及道路边缘区域”;trafficLight系列目标以 “杆式固定安装形态、矩形灯体结构、红黄绿三色光源交替闪烁” 为共性特征,细分类别则依据 “灯光颜色 + 箭头指向” 形成专属标识,trafficLight-Green呈现稳定绿色光源,trafficLight-GreenLeft为绿色左转箭头光源,trafficLight-Red为稳定红色光源,trafficLight-RedLeft为红色左转箭头光源,trafficLight-Yellow为稳定黄色光源,trafficLight-YellowLeft为黄色左转箭头光源,光源颜色与指向的组合特征构成交通指令的核心识别依据;truck目标展现 “四轮及以上重型车身结构、外观尺寸宽大且车头与货厢区分明显、行驶速度缓慢且转弯半径大、易在城郊路段、物流园区周边出现”。这些目标在城市主干道、居民区支路、高速路收费站、城乡结合部路口等不同场景中形成明确类别区分的区域,其外观特征信号强度、运动轨迹规律与道路场景类型、交通流量密度呈对应关联,目标的形态细节、动态行为及场景适配性是核心识别依据;相较于道路护栏、路牌标识、施工围挡、临时堆放物等干扰目标,十二类核心目标的观测特征具有显著辨识度,这种基于外观形态、动态行为及道路场景关联特征的差异化表现,可有效规避复杂背景干扰、传感器数据噪声、目标遮挡等识别难题,确保雨雾天、夜间、拥堵路段等复杂场景下的检测准确性,且在全域自动驾驶环境感知、高危目标预警等核心场景中,目标的分布位置、运动速度、交互状态可辅助构建车辆行驶安全决策基准,为自动避障、跟车行驶、红绿灯识别通行等功能提供依据,在施工路段、人车混行区域等人工驾驶易疲劳的场景中,能突破环境限制实现全时段动态批量筛查,在自动驾驶车辆安全测试、交通参与者行为分析等重点场景中,可替代人工完成高通量探测,精准捕捉目标类别、运动参数等精细化信息,通过量化统计与动态比对明确道路通行风险分布与安全等级,为自动驾驶技术研发与交通管理优化提供精准技术支撑与决策依据。

3、数据集详情
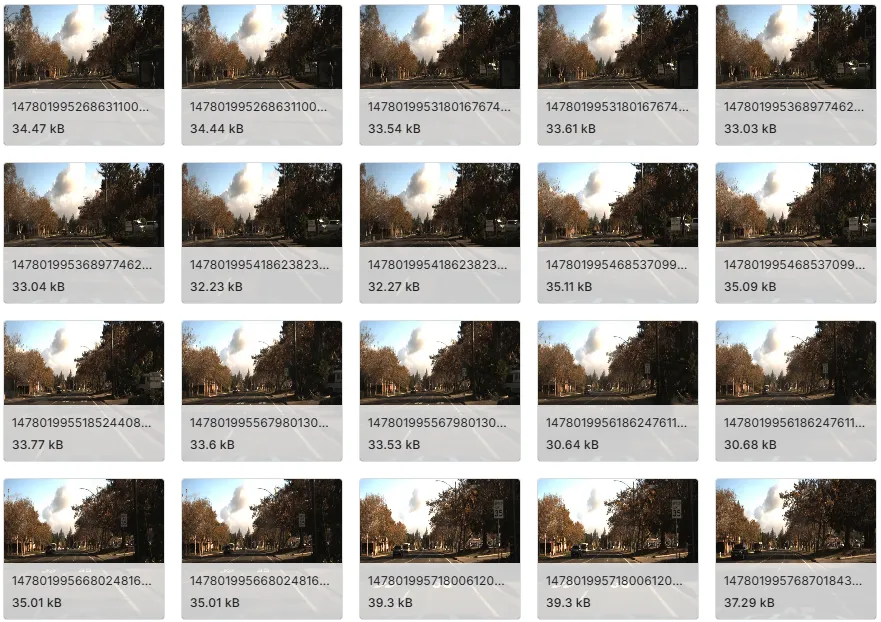
本数据集来源于开源网Kaggle(https://www.kaggle.com/)。数据集信息如下所示。数据集共包括11类,划分为训练集、验证集和测试集。
# 目录结构ObstacleDataset/├── images/│ ├── train/ │ ├── val/ │ └── test/ └── labels/ ├── train/ ├── val/ └── test/ # 类别nc: 11names: ['biker', 'car', 'pedestrian', 'trafficLight', 'trafficLight-Green', 'trafficLight-GreenLeft', 'trafficLight-Red', 'trafficLight-RedLeft', 'trafficLight-Yellow', 'trafficLight-YellowLeft', 'truck']# 适用算法YOLO系列 "YOLOv5/YOLOv8/YOLOv11"等等
4、YOLOv11源码
# 训练代码from ultralytics import YOLOif __name__ == '__main__': model = YOLO(r"yolov11n.yaml") model.load("yolo11n.pt") results = model.train(data=r"Obstacle.yaml", epochs=300, imgsz=640, batch=32, workers=4, device=0, name="train_Obstacle")# 验证代码from ultralytics import YOLOmodel = YOLO("best.pt")results = model.val(data='Obstacle.yaml', project="runs", imgsz=640, batch=32, workers=4)print(results)# 预测代码from ultralytics import YOLOmodel = YOLO("best.pt")results = model.predict("Obstacle.jpg", save=True, imgsz=640, conf=0.5)for result in results: boxes = result.boxes probs = result.probs result.show()
5、应用场景
自动驾驶场景障碍物目标检测,作为自动驾驶车辆环境感知、路径规划、智能避障及行驶安全决策的核心技术手段,是实现车辆全路况自适应、多目标精准识别的关键载体;依托车载摄像头、激光雷达、毫米波雷达及车载智能计算终端,结合城市主干道、居民区支路、高速公路收费站、人车混行复杂路段等不同应用场景的 biker、car、pedestrian、trafficLight、trafficLight-Green、trafficLight-GreenLeft、trafficLight-Red、trafficLight-RedLeft、trafficLight-Yellow、trafficLight-YellowLeft、truck 十二类目标的外观形态特征、动态行为属性及环境干扰属性,优化多类别障碍物目标检测算法与精准识别模型,可在复杂路况交织、目标密集遮挡、光照条件多变、天气环境恶劣等场景下,实现对十二类障碍物目标的实时定位、特征提取与类型判别,为自动驾驶车辆的跟车行驶、车道变更、红绿灯识别通行、紧急避障等功能提供即时、可靠的感知数据支持;自动驾驶障碍物目标的检测精准度与类型识别效率,直接决定了自动驾驶车辆环境感知、路径规划及行驶安全决策等场景的智能化水平与响应效率,融合多传感器融合感知的目标形态 - 行驶场景特征基线数据库、交通参与者行为模型及目标属性与感知环境规律,能实现十二类障碍物目标的精准判别 —— 在车载多传感器采集的道路环境数据中,十二类障碍物目标因与道路背景(道路护栏、路牌标识、施工围挡、临时堆放物)存在显著的外观形态差异与动态行为差异,呈现出独特的感知特征:biker 目标表现为 “两轮交通工具载体 + 人体与车辆绑定运动”,呈现人车一体的结构形态、骑行姿态的动态特征、与周边目标保持较近安全距离的分布属性;car 目标呈现 “四轮封闭式车身结构 + 平滑连续行驶轨迹”,具有轮廓规整的外观特征、匀速变道的行为标识、与道路标线精准贴合的分布特点;pedestrian 目标突出 “无交通工具承载 + 肢体动作灵活多变”,表现为人体轮廓的形态特征、随机行走的行为属性、与道路边缘区域高度关联的分布关系;trafficLight 系列目标以 “杆式固定安装 + 矩形灯体结构” 为共性特征,细分类别则依据 “灯光颜色 + 箭头指向” 形成专属感知标识,trafficLight-Green 呈现稳定绿色光源,trafficLight-GreenLeft 为绿色左转箭头光源,trafficLight-Red 为稳定红色光源,trafficLight-RedLeft 为红色左转箭头光源,trafficLight-Yellow 为稳定黄色光源,trafficLight-YellowLeft 为黄色左转箭头光源,光源颜色与指向的组合特征构成交通指令识别的核心依据;truck 目标展现 “四轮及以上重型车身结构 + 缓慢行驶转弯半径大”,具有车头货厢分离的外观特征、低速重载的行为属性、与城郊物流路段高度适配的分布特点;十二类障碍物目标集中分布于城市拥堵路口、学校周边人车混行区、高速路匝道口、施工路段等重点区域场景,是自动驾驶车辆环境感知的关键监测对象;相较于感知场景中的其他干扰目标(如道路护栏、路牌标识、施工围挡、临时堆放物),十二类障碍物目标的综合特征具有显著辨识度:道路护栏虽有明确形态,但无障碍物目标的动态行为与交互属性;路牌标识虽有固定分布,但无障碍物目标的运动轨迹与形态变化特征;施工围挡虽有场景干扰,但无障碍物目标的交通参与者属性与行为关联;临时堆放物虽有空间占位,但无障碍物目标的规则形态与动态特征;这种基于外观形态特征、动态行为属性及行驶场景关联特征的差异化表现,可有效规避传感器视角遮挡、复杂路况干扰、目标密集交织及光照天气条件变化对目标检测的影响,同时借助多传感器融合感知的优势,实现对车辆周边全域内障碍物目标的全面覆盖式检测,确保复杂行驶场景下十二类障碍物目标的检测准确性与类型识别精准度;在全域自动驾驶环境感知、高危目标实时预警等大范围监测场景中,障碍物目标的分布位置、运动速度可辅助构建车辆行驶安全决策基准,结合目标的类型分布、行为状态、交互关系,能快速锁定风险高发区域、紧急避障重点目标,为自动驾驶车辆的路径规划与安全决策提供精准依据,提升自动驾驶技术的可靠性与安全性水平;在传统人工驾驶易出现视觉盲区的夜间低光照路段、雨雾冰雪恶劣天气路段、拥堵车流密集区域等场景中,多传感器融合感知可突破环境与视觉条件限制,障碍物目标的形态行为特征不受环境阻隔影响,其与背景的差异化表现可作为稳定识别点,结合多维度感知的区域数据,实现全区域、无死角的障碍物目标动态批量筛查;在自动驾驶车辆安全测试、交通参与者行为分析、智能交通系统优化等重点监测场景中,多传感器融合感知可替代人工完成高通量道路探测作业,障碍物的类型、运动参数、交互状态等精细化信息可被精准捕捉,通过对这些特征的量化分析与动态比对,能够进一步明确道路通行风险的分布范围、安全等级(如城市路口的行人碰撞风险等级、高速路段的跟车安全距离等级),为自动驾驶技术研发企业、交通管理部门及智能交通系统建设单位提供精准的技术支撑与决策依据。
6、数据集地址
# 数据集地址"https://www.kaggle.com/datasets/barkataliarbab/udacity-self-driving-car-obstacles-dataset"# 注意事项"下载可能需要VPN"
7、公众号(关注我,获取更多开源数据集)
"开源数据集" 地址获取方式第1-197期 数据集地址:公众号后台 发送"第n期"获取数例如: "第1期"第198期及之后 数据集地址:查看对应"文章末尾",数据集地址在文章末尾例如: 第198期的数据集地址 "请查看第198期文章末尾"
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
