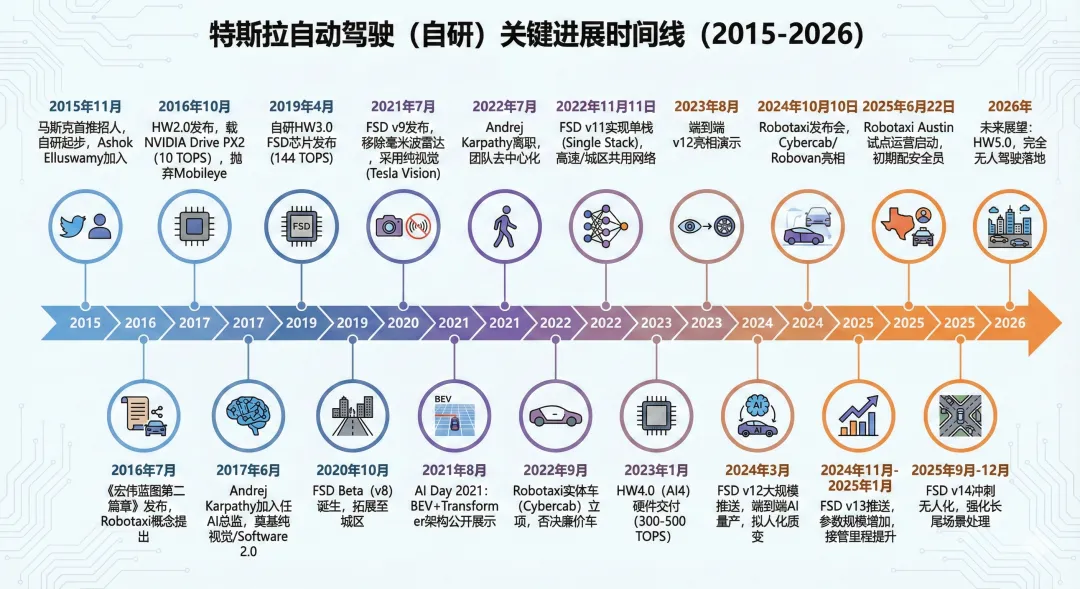
从2015年马斯克发布那条著名的招聘推特,到2026年Robotaxi在奥斯汀穿梭运营,特斯拉的自动驾驶之路走过了激进、痛苦但又极具颠覆性的十年。
阶段一:自研起步与团队组建 (2015 - 2017)
这一阶段是特斯拉脱离Mobileye,从零搭建AI团队和硬件架构的“至暗时刻”与破晓前夜。
2015年11月 | 梦的开始 Elon Musk 在 Twitter 上发布了著名的招聘推文:“Ramping up the Autopilot software team at Tesla to achieve generalized full autonomy.”(正在扩充特斯拉Autopilot软件团队以实现通用完全自动驾驶)。 背景: 当时特斯拉已预感到与Mobileye的合作难以长久,开始秘密布局自研。Ashok Elluswamy(现任特斯拉自动驾驶负责人)正是看到这条推文后加入团队的第一批核心成员。
2016年7月20日 | Robotaxi 概念诞生 马斯克发布《宏伟蓝图第二篇章》(Master Plan Part Deux),首次公开提出“Tesla Network”共享车队(Robotaxi)的概念。当时的设想非常超前:车主可以在不用车时,让车辆出去自动接单赚钱。
2016年10月 | HW2.0 硬件发布 特斯拉正式搭载 NVIDIA Drive PX2 芯片,算力约为 10 TOPS 。这标志着特斯拉彻底抛弃 Mobileye,虽然短期内软件体验倒退,但这开启了特斯拉真正的数据闭环与自研之路。
2017年6月 | Andrej Karpathy 加入 Andrej Karpathy 离开 OpenAI 加入特斯拉担任 AI 总监 (Director of AI)。 意义: 他的加入是决定性的。他主导了特斯拉视觉算法从传统计算机视觉向深度神经网络(Software 2.0)的彻底转型,是后来特斯拉坚持“纯视觉”路线的奠基人。
阶段二:重写与架构确立 (2018 - 2021)
这一时期,特斯拉完成了底层算力(自研芯片)和感知架构(BEV+Transformer)的统一,确立了行业技术标准。
2019年4月 | 自研 FSD 芯片 (HW3.0) 发布自研 HW3.0 芯片,算力达到 144 TOPS 。这让特斯拉不再受制于人,为运行大规模神经网络提供了坚实的算力基础。
2020年10月 | FSD Beta 诞生 FSD Beta (v8) 向小范围极客用户推送。这意味着自动驾驶的能力边界,终于从封闭的高速公路拓展到了复杂的城市街道。
2021年7月10日 | FSD v9 与纯视觉 FSD Beta v9 发布。这是第一个移除毫米波雷达依赖、完全采用“纯视觉”方案(Tesla Vision)的测试版本,引发了行业巨大争议,但特斯拉坚持了下来。
2021年8月19日 | AI Day 与 BEV+Transformer 在首届 Tesla AI Day 上,Andrej Karpathy 正式公开展示了 BEV (Bird's Eye View) + Transformer 的感知架构。 技术突破: 将多个摄像头的2D图像通过 Transformer 转换到3D鸟瞰空间进行融合。这一架构彻底解决了多传感器拼接和时序记忆的问题,成为后来全行业争相模仿的范式。
2021年9月10日 | FSD v10 发布 神经网络架构进一步优化,路口处理能力显著提升。
阶段三:单栈融合与人员更迭 (2022 - 2023)
这一阶段的核心任务是将高速(Autopilot)和城区(FSD)两套割裂的代码合并,并确立 Robotaxi 实体车项目。
2022年7月13日 | Andrej Karpathy 离职 Andrej Karpathy 宣布离开特斯拉。Ashok Elluswamy 和 Milan Kovac 接过接力棒,团队进入去中心化的高效协作模式。
2022年9月 | Robotaxi 实体车立项 根据沃尔特·艾萨克森的传记披露,马斯克在此时的一次会议上否决了先造“2.5万美元廉价车”的提议,拍板决定全力研发没有方向盘和踏板的专用 Robotaxi(即后来的 Cybercab)。
2022年11月11日 | FSD v11 实现单栈 (Single Stack) FSD Beta v11 开始向员工推送。 核心意义: 实现了 Single Stack(单栈架构),即高速公路和城市街道首次共用同一套神经网络架构。这结束了长期以来割裂的驾驶体验。
2023年1月 | HW4.0 硬件升级 Model S/X 开始搭载 HW4.0 (AI4) 硬件交付。算力提升至 300-500 TOPS ,摄像头分辨率与推理能力大幅增强。
阶段四:端到端与完全无人化 (2023 - 2026至今)
从规则驱动转向AI驱动,FSD 完成了最后的质变,Robotaxi 正式走入现实。
2023年8月 | 端到端 v12 初亮相 马斯克直播演示 FSD v12
2024年3月 | FSD v12 大规模推送 FSD v12 (Supervised) 正式普及。这是 “端到端神经网络” (End-to-End) 的首次量产落地。特斯拉用 AI 模型替换了超过 30 万行 C++ 控制代码,车辆驾驶的拟人感发生了质变。
2024年10月10日 | Robotaxi 发布会 在 "We, Robot" 发布会上,Cybercab(专用 Robotaxi)和 Robovan 正式亮相。取消了方向盘和踏板,预计2026年投产。
2024年11月 - 2025年1月 | FSD v13 性能飞跃 FSD v13 系列版本开始推送(v13.2 于 2025 年初广泛推送)。 特性: 模型参数规模大幅增加,接管里程数提升约 5-10 倍,旨在解决 v12 在复杂场景下的稳定性问题。
2025年6月22日 | 奥斯汀运营里程碑 特斯拉在得州奥斯汀(Austin)正式启动 Robotaxi 试点运营 。 状态: 初始阶段为小规模试点(约 10-20 辆 Model Y),面向员工和受邀用户开放。虽然马斯克曾预告“无人监管”,但初期仍配有安全员(Safety Driver)以应对突发状况,随后逐步过渡。
2025年9月 - 12月 | FSD v14 冲刺无人化 FSD v14 开始分批推送(v14.2 于 2025 年底面世)。 特性: 可实现点到点的自动驾驶能力,进一步强化了端到端的长尾场景处理能力,为完全无人驾驶(Unsupervised)做最后冲刺。