引言:自动驾驶新纪元的里程碑
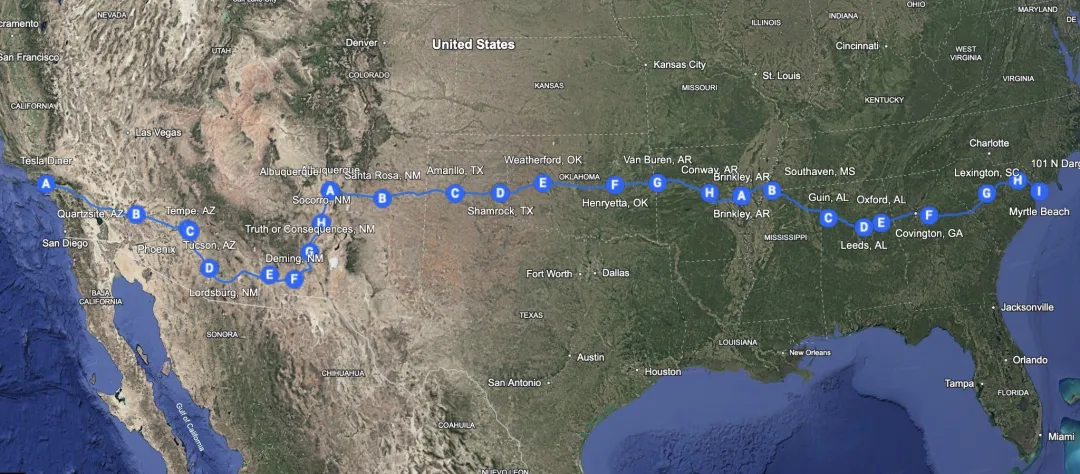
2025 年 12 月 31 日,当全球都在准备迎接新年钟声时,一位名叫 David Moss 的特斯拉车主悄然创造了自动驾驶历史。他驾驶着搭载 FSD V14.2 系统的 2025 款 Model 3,从洛杉矶的特斯拉餐厅出发,历时 2 天 20 小时,穿越 24 个州,最终抵达南卡罗来纳州默特尔海滩,全程 2732.4 英里(约 4397 公里),全程零人工接管。
这一成就的意义远超一次简单的长途驾驶。作为全球首个有公开数据、可被第三方验证的 "Coast-to-Coast Zero Intervention" 案例,它标志着马斯克在 2016 年许下的 "两年内实现完全自动驾驶" 承诺,在推迟整整 8 年后,终于以一种震撼的方式落地。更令人惊讶的是,截至完成横贯美国之旅时,Moss 使用 FSD 的总里程已超过 10,638.8 英里(约 16,000 公里),且全程 100% 依赖 FSD 系统。
这次旅程的验证方式也极具创新性。第三方平台 FSD Database 通过车辆遥测数据进行独立验证,这些数据直接传输至特斯拉服务器,形成防篡改记录,任何人工接管都会永久破坏零干预记录。这种透明的验证机制为自动驾驶技术的可信度提供了前所未有的保障。
值得一提的是,David Moss 的身份颇具戏剧性 —— 他在 X 平台上自称是一名 "激光雷达销售员",而特斯拉恰恰是纯视觉技术路线的坚定支持者。这种身份反差为这次历史性旅程增添了更多话题性。
本文将从三个维度深入解读这一里程碑事件:首先剖析 FSD V14.2 在此次旅程中展现的技术突破,揭示其背后的技术范式革命;其次分析此次事件对整个自动驾驶行业产生的深远影响;最后将 FSD V14.2 与 Waymo、华为、小鹏 XNGP 等主流自动驾驶系统进行全面对比,评估其在行业中的技术地位。
一、FSD V14.2 技术突破深度解析
1.1 端到端神经网络架构的革命性突破
FSD V14.2 最核心的技术突破在于彻底重构了自动驾驶的软件架构,实现了从 "模块拼装" 到 "端到端直连" 的范式革命。
在 V14 之前,特斯拉 FSD 仍采用经典的模块化设计:感知模块识别车辆、行人、车道线等;预测模块判断其他交通参与者的行为意图;规划模块生成安全舒适的行驶轨迹;控制模块将轨迹转化为方向盘、油门、刹车指令。各模块间依赖大量人工规则与接口,一旦感知出错,后续环节将 "雪崩式" 失败。
而 V14.2 将整个系统压缩为一个统一的神经网络,其架构设计堪称革命性:
- • 输入层:8 路摄像头视频流(200+ FPS)、IMU / 轮速数据、导航指令(如 "前方 5 公里下高速"),甚至包括环境声音(用于紧急车辆检测)
- • 处理层:所有信息在一个端到端网络中融合推理,梯度可从输出反向传播至输入,实现感知与决策的联合优化
- • 输出层:直接生成方向盘转角、油门 / 刹车开度等底层控制信号
正如前 AI 负责人 Andrej Karpathy 所总结:"这是软件 2.0 在物理世界的完全接管"。规则代码彻底退场,神经网络直接输出驾驶动作。这种架构变革使得系统能像人类一样 "边看路边理解目的地",不再依赖高精地图,也不再被模块间的接口所束缚。
1.2 Occupancy Networks 技术的创新应用
在纯视觉技术路线上,FSD V14.2 通过 *\Occupancy Networks(占用网络)\* 实现了从像素到体素的端到端映射。这一技术的工作流程包括:
多视角图像输入:8 个摄像头同步采集周围环境图像。值得注意的是,前视摄像头分辨率从 1280×960 提升至 2896×1876,为 Occupancy Networks 提供更精细的输入。
深度估计与反投影:系统通过多摄像头立体视觉结合神经网络,从 2D 图像中预测深度,生成 "伪点云"(Pseudo Point Cloud)。这不是真正的激光雷达点云,而是模型预测的深度图,虽然精度和稠密度低于激光雷达,但足以满足自动驾驶需求。
BEV(Bird's Eye View)融合:通过 Transformer 架构,将多视角的 3D 信息智能融合到统一的俯视图空间。该过程能有效处理遮挡、视角缺失等问题。
3D 体素化与 Occupancy 预测:在 BEV 空间上构建 3D 体素网格,网络为每个体素预测占用概率、语义类别(可行驶、路沿、人行道等)和运动矢量(用于动态物体)。这种 "空间中心"(Space-Centric)的范式,对未知障碍物(如掉落货物、动物)具有天然鲁棒性,因为系统关注的是 "空间是否可用",而非 "物体是什么"。
1.3 模型规模与性能的飞跃式提升
FSD V14.2 在模型规模上实现了4.5-10 倍的巨大提升,从 V13 的 55 万参数扩展到 5500 万参数。这一扩展带来了全方位的性能提升:
决策速度大幅提升:在 HW4.0 硬件上,V14 的平均决策延迟从 V13 的 180ms 降至 95ms,满足高速场景下的实时响应需求。
视觉处理能力增强:视觉处理帧率从 36Hz 跃升至 48Hz,每秒可捕捉 48 帧路况画面,对行人动作、交通信号的细节识别延迟降低 30% 以上。
复杂场景理解能力:更大的模型意味着车辆能够理解更复杂的环境信息,在拥堵路口、非标准道路或恶劣天气条件下,展现出更接近人类的判断力。
新功能的引入:系统新增了五种驾驶模式 —— 慵懒(Sloth)、从容(Chill)、标准(Standard)、匆忙(Hurry)和疯狂麦克斯(Mad Max),满足不同用户的驾驶偏好。
1.4 多模态感知能力的突破性进展
FSD V14.2 首次将音频感知纳入核心感知体系,与视觉、雷达形成 "三位一体" 的多模态融合架构。这一创新具有重要意义:
紧急车辆检测能力:系统能够识别紧急车辆的警笛声、喇叭声等音频信号,为决策提供额外的上下文信息。在此次横贯美国之旅中,这一功能确保了车辆能够及时避让救护车、消防车等紧急车辆。
夜间和恶劣天气表现:通过多帧融合与热力图增强技术,系统在夜间 / 雨雾天气下的目标检测鲁棒性显著提升,有效降低了误刹率。
行人意图预判:系统对行人侧向横穿的预判提前了 0.6 秒,而汽车工程学会给出的紧急制动平均反应时间是 0.7 秒。这意味着 FSD V14.2 在某些场景下的反应速度已经超越了人类驾驶员。
1.5 数据飞轮与影子模式的威力
FSD V14.2 的成功极度依赖其闭环、自进化的数据飞轮:
影子模式(Shadow Mode):数百万辆已售特斯拉车辆持续运行 FSD 算法(即使用户未购买 FSD)。当人类驾驶行为与 FSD 预测输出存在显著偏差时,系统自动将该场景的前后 10 秒完整数据(视频、车辆状态、控制信号)上传至云端。这一机制以极低成本,从真实世界中挖掘海量边缘案例(Edge Cases)。
Dojo 超算的支撑:特斯拉自研的 AI 超级计算机 Dojo 据称可处理 40 万视频片段 / 秒,用于大规模训练和验证。2025 年,Dojo 算力已达 100 EFLOPS,远超国内车企的 0.6-3.3 EFLOPS 水平。
训练策略的多元化:
- • 模仿学习(Imitation Learning):用数十亿英里人类驾驶数据作为训练目标
- • 强化学习(Reinforcement Learning):在高保真仿真环境中,AI 通过试错优化策略
- • 在线学习(Online Learning):车辆在实际行驶中产生的新数据,持续反馈至云端,驱动模型微调
1.6 复杂路况处理能力的全面验证
在此次横贯美国之旅中,FSD V14.2 展现了处理各种复杂路况的卓越能力:
高速公路表现:在高速公路上,系统能够稳定保持在车道中央,根据车流情况主动变道超车。面对施工区域和临时交通标志,系统能及时调整行驶策略,确保安全通过。
城市道路处理:城市道路挑战更为复杂,包括无保护左转、行人密集区域和停车让行等场景。根据测试报告,V14.2 在这些场景下的判断和决策更加接近人类驾驶员,减少了不必要的急刹车。
施工路段应对:何小鹏在试驾中特别提到,FSD V14.2 能够处理极其复杂的施工场景。系统甚至能够在只有手指粗的细杆路障前,自主走到逆行道路然后再切回来,整个过程非常流畅。
自动泊车能力:车辆能完全自主地完成寻找车位、泊入泊出以及充电对接全过程,包括在特斯拉超级充电站的自动泊车。这证明了 FSD 在 "最后一公里" 场景下的实用性。
1.7 极端天气条件下的卓越表现
FSD V14.2 在极端天气条件下的表现尤为引人注目,多项测试表明其性能已经超越多数人类驾驶员:
暴雨天气表现:在暴雨天气下,系统表现有了明显进步。通过端到端神经网络和大量真实世界数据训练,系统能够有效应对极端天气。在能见度不足 50 米的夜间暴雨中,系统仍能以约 90 公里 / 小时的速度稳定行驶,精准识别车道线、避让右侧大货车。
夜间山路驾驶:在漆黑湿滑的蜿蜒山路测试中,系统始终将车辆稳定在车道中央,车速控制与转向时机拿捏精准,操控稳定性超越多数人类驾驶员。
积水和坑洼处理:系统能够主动避让积水和坑洼,对黄灯、施工区、积水的减速处理非常自然。官方数据显示,这一版本在雨天躲水坑、识别坑洼的能力提升了 30%,视觉识别精度比上一代高了 25%。
1.8 系统可靠性与安全冗余设计
FSD V14.2 在系统可靠性方面实现了质的飞跃:
关键性能指标大幅提升:"关键脱离英里数"(miles to critical disengagement)这一核心指标从 V13 的 441 英里飙升至 V14.2 的 9,200 英里以上,提升了 20 倍。这意味着系统平均每 9,200 英里才需要一次关键干预,已经非常接近无监督驾驶的要求。
安全冗余机制:尽管采用端到端架构,特斯拉仍保留了多重安全冗余:
- • 驾驶员监控系统和实时接管机制,确保 L2 + 级辅助驾驶状态下的安全底线
- • 对极端不合理的指令设置限制,保留少量底层规则(如防撞紧急制动)作为兜底方案
- • 支持冗余硬件配置,关键组件故障时备用组件可无缝接管
接管率的大幅下降:在城市道路每千英里干预次数从 V12 版本的 4.5 次降至 V14 的 0.8 次,实现了质的飞跃。这一数据充分说明了系统可靠性的显著提升。
二、对自动驾驶行业的深远影响
2.1 技术路线之争的决定性转折
David Moss 的零接管横贯美国之旅,对自动驾驶行业的技术路线选择产生了决定性影响。特斯拉用 8 颗摄像头加不到 2000 美元的硬件成本,完成了 Waymo/Cruise 需要 10 万美元以上激光雷达加高精地图才能实现的演示。这一事实有力地证明了纯视觉路线在成本与可扩展性上的压倒性优势。
供应链的连锁反应已经开始显现。激光雷达公司(如 Luminar、Innoviz)面临巨大压力,纯视觉方案正在成为新主流。中国产业链也迎来重大机遇,若 FSD 2026 年第一季度入华,将引爆国产 CIS 传感器、SerDes 芯片、域控制器、4D 毫米波雷达的订单需求。
技术理念的转变更为深刻。特斯拉证明了 "重感知、轻地图、大模型" 路径的可行性,这对整个行业的技术发展方向产生了深远影响。越来越多的企业开始重新评估多传感器融合方案的必要性,思考是否真的需要昂贵的激光雷达来实现自动驾驶。
2.2 监管政策的推动作用
此次事件对全球自动驾驶监管政策产生了积极的推动作用:
美国监管环境的变化:马斯克在 2025 年 11 月股东大会上预测,FSD 有望在 2026 年 2 月或 3 月获得中国全面批准。这一预测的底气很大程度上来自于此次零接管横贯美国的成功演示。美国 DMV 虽然仍将 FSD 划为 L2 级别,要求驾驶员双手随时待命,但技术的进步正在推动监管政策的调整。
中国市场的机遇:FSD 的成功为中国自动驾驶监管提供了重要参考。专家预测,2026 年第一季度可能成为 FSD 入华的关键时间节点。这将加速中国自动驾驶相关法规的制定和完善。
国际标准的影响:此次透明的第三方验证机制为全球自动驾驶技术标准的制定提供了新思路。通过防篡改的数据记录和独立验证,自动驾驶技术的可信度得到了前所未有的保障,这将推动国际标准组织制定更加科学、透明的技术规范。
2.3 市场格局的重塑效应
FSD V14.2 的成功正在重塑自动驾驶市场格局:
对特斯拉的直接影响:
- • 技术领先地位得到巩固,FSD 订阅服务收入预计将大幅增长
- • 市值有望进一步提升,投资者对特斯拉自动驾驶业务的信心增强
- • 为 Robotaxi 业务奠定了坚实的技术基础,马斯克的 Robotaxi 梦想变得更加现实
对传统车企的冲击:传统车企在自动驾驶领域的落后地位更加明显。它们面临着艰难的选择:是继续投入巨资开发自己的系统,还是与特斯拉等技术领先企业合作?
对科技公司的启示:科技公司意识到,自动驾驶不仅是技术竞赛,更是数据和生态的竞争。特斯拉通过数百万辆在路上行驶的车辆构建的数据优势,是其他企业短期内难以逾越的壁垒。
2.4 消费者认知的根本性改变
此次事件对消费者认知产生了根本性改变:
从怀疑到信任的转变:零接管横贯美国的成功演示,让普通消费者看到了自动驾驶技术的成熟度。"自动驾驶" 不再是科幻电影中的概念,而是已经在现实中实现的技术。
对纯视觉方案的接受:消费者开始认识到,没有激光雷达的纯视觉方案同样可以实现安全、可靠的自动驾驶。这打破了长期以来 "自动驾驶必须配备激光雷达" 的固有认知。
购买决策的影响:越来越多的消费者在购买汽车时,将自动驾驶能力作为重要的考虑因素。特斯拉 FSD 的成功将推动整个行业提升自动驾驶配置,加速自动驾驶技术的普及。
2.5 产业生态的深远变革
FSD V14.2 的成功正在引发整个产业生态的深远变革:
保险行业的变革:自动驾驶安全性的提升将推动保险行业重新评估风险模型。随着自动驾驶技术的成熟,传统的车险定价模式将被颠覆,基于使用量和自动驾驶里程的新型保险产品将应运而生。
汽车维修行业的转型:自动驾驶车辆的维护需求与传统车辆存在显著差异。软件更新、传感器校准、算法优化将成为新的服务内容,这将推动汽车维修行业向智能化服务转型。
能源基础设施的升级:随着自动驾驶电动汽车的普及,对充电基础设施的需求将大幅增加。特斯拉的超级充电网络优势将更加明显,同时也将推动其他充电网络的技术升级和规模扩张。
2.6 技术发展路径的重新定义
此次事件重新定义了自动驾驶技术的发展路径:
从功能验证到系统验证的转变:未来的测试重点将从功能级验证(如 AEB 触发率)转向系统级评估,包括数据飞轮的效率与覆盖度、模型迭代速度与 OTA 稳定性、软硬件协同的鲁棒性等。
从封闭测试到开放道路的演进:特斯拉通过影子模式在真实道路上进行大规模测试的方法,为行业提供了新的思路。封闭场地的测试已经无法满足技术发展的需求,开放道路的大规模验证成为必然趋势。
从单一技术到生态系统的构建:FSD V14.2 的成功不仅是技术的胜利,更是生态系统的胜利。特斯拉构建的 "硬件 + 软件 + 数据 + 服务" 的完整生态,成为其核心竞争力。这启示其他企业,自动驾驶的竞争已经从单一技术的竞争升级为生态系统的竞争。
三、主流自动驾驶系统综合对比分析
3.1 技术架构的根本性差异
各主流自动驾驶系统在技术架构上存在根本性差异,这直接决定了它们的技术路线和发展方向:
FSD V14.2 的纯视觉优势:特斯拉坚持纯视觉路线,通过端到端神经网络实现感知、预测、规划、控制的一体化。这种架构的优势在于成本极低、系统简洁、迭代速度快。通过大量真实世界数据的训练,系统已经能够处理各种复杂场景。
Waymo 的多传感器依赖:Waymo 采用 "激光雷达 + 摄像头 + 雷达" 的多传感器融合策略,配合高精地图使用。这种架构在结构化道路环境下表现优异,但成本高昂,且对高精地图的依赖使其在面对突发情况时缺乏灵活性。旧金山大停电事件中 Waymo 车队集体宕机就是明证。
华为和小鹏的平衡路线:华为 ADS 和小鹏 XNGP 都采用激光雷达 + 视觉融合方案,在成本和性能之间寻求平衡。华为凭借自研芯片在算力优化上有优势,小鹏则在本土化适配和用户体验上表现出色。
3.2 性能表现的多维度对比
在性能表现方面,各系统呈现出明显的差异化特征:
关键性能指标对比:
FSD V14.2 的全面领先:
- • "关键脱离英里数" 达到 9,200 英里,是 Waymo 的 9 倍以上
- • 城市道路接管率最低,仅为 0.8 次 / 千英里
- • 在极端天气条件下表现卓越,多项测试表明其性能已经超越人类驾驶员
Waymo 的结构化优势:Waymo 在结构化道路环境下表现稳定,但其多传感器架构在面对非结构化环境时显得不够灵活。2025 年 12 月旧金山大停电事件中,Waymo 车队因无法识别失效信号灯而集体宕机,暴露了其系统的局限性。
华为的技术积累:华为 ADS 在技术指标上表现良好,特别是在夜间识别准确率上达到 96%。华为凭借在通信和芯片领域的技术积累,在系统集成和优化上有独特优势。
小鹏的本土化优势:小鹏 XNGP 虽然在绝对性能上不如前三者,但其在本土化场景适配、用户体验优化等方面表现出色,特别适合中国复杂的交通环境。
3.3 应用场景的适应性分析
各系统在不同应用场景下的表现存在显著差异:
FSD V14.2 的全场景覆盖能力:
- • 高速公路:表现优异,自动变道、超车、上下匝道等操作流畅自然
- • 城市道路:能够处理无保护左转、行人密集区域、复杂路口等场景
- • 极端天气:暴雨、夜间山路等极端条件下表现超越人类驾驶员
- • 特殊场景:施工路段、临时交通管制等场景处理能力突出
Waymo 的地理围栏限制:
- • 主要在美国 5 个城市(旧金山、洛杉矶、凤凰城、奥斯汀、亚特兰大)提供服务
- • 2025 年 11 月才开始在高速公路提供服务,此前主要限于城区道路
华为 ADS 的中国特色:
- • 在复杂的城市交通、非机动车混行等场景下表现良好
小鹏 XNGP 的场景聚焦:
- • 城市 NGP 仍在逐步开放中,目前主要覆盖一线城市
- • 泊车功能是其亮点,支持记忆泊车、远程泊车等功能
3.4 商业化程度的现实差距
各系统在商业化程度上呈现出明显的梯队分布:
特斯拉 FSD 的商业化领先:
- • FSD 订阅服务已成为特斯拉重要的收入来源,预计年收入超过 10 亿美元
- • 全球累计 FSD Beta 用户超过 40 万,形成了庞大的测试和反馈网络
- • 2025 年 FSD 在北美的采用率增长了 25%
- • 计划 2026 年推出 Robotaxi 服务,商业化前景明朗
Waymo 的运营规模优势:
- • 2025 年累计完成付费订单 1400 万单,较 2024 年增长 3 倍
- • 周付费订单量突破 45 万单,单台车日均订单约 26 单
- • 但仍处于亏损状态,2025 年第三季度亏损 14.3 亿美元
华为和小鹏的快速追赶:
- • 华为 ADS 主要搭载在问界、极狐等品牌车型上,正在快速扩大市场份额
- • 小鹏 XNGP 已在 P7i、G9 等车型上标配,用户反馈良好
- • 两者都在加速城市 NGP 功能的开放,商业化进程不断加快
3.5 技术发展路线的未来走向
各系统的技术发展路线呈现出不同的战略选择:
特斯拉的持续进化:
- • 坚持纯视觉路线,通过端到端神经网络不断提升性能
- • 计划推出 HW5.0 硬件,算力将提升 40 倍,支持更复杂的模型
Waymo 的技术转型:
- • 正在开发端到端的 EMMA 算法,试图减少对模块化架构的依赖
- • 计划 2026 年将服务扩展至 20 个城市,包括东京、伦敦等海外城市
华为的全栈自研:
- • 目标是在 2026 年实现 L4 级自动驾驶的规模化商用
小鹏的技术融合:
- • 采用 "自研 + 合作" 的策略,在核心算法上自研,在硬件上与英伟达合作
- • 计划 2026 年推出支持 L3 级自动驾驶的新车型
3.6 综合评价与未来展望
基于以上多维度对比,我们可以对各系统进行综合评价:
FSD V14.2 的综合优势:
- • 技术领先性:端到端架构和纯视觉路线展现了强大的技术实力
- • 成本优势:硬件成本不到 2000 美元,具有巨大的商业潜力
- • 数据优势:通过数百万辆车构建的全球最大自动驾驶数据网络
Waymo 的传统优势与挑战:
华为和小鹏的本土机遇:
未来竞争格局预测:
短期内(1-2 年),特斯拉将继续保持技术领先地位,FSD V14.2 的成功将加速其商业化进程。Waymo 凭借运营经验和技术积累,仍将在特定市场保持优势。华为和小鹏将在中国市场快速增长,特别是在城市 NGP 领域有望实现突破。
中长期(3-5 年),随着技术的不断进步和成本的持续下降,自动驾驶将进入大规模商用阶段。特斯拉的技术优势可能会被其他企业通过不同路径追赶,但特斯拉构建的数据和生态优势仍将是其核心竞争力。
最终,自动驾驶的竞争将不仅是技术的竞争,更是生态系统的竞争。谁能构建起最完善的 "硬件 + 软件 + 数据 + 服务" 生态系统,谁就能在这场变革中占据主导地位。
结语:自动驾驶新时代的开启
David Moss 驾驶 FSD V14.2 完成的零接管横贯美国之旅,无疑是自动驾驶发展史上的一个重要里程碑。这一成就不仅证明了技术的可行性,更重要的是,它向世界展示了自动驾驶技术已经从实验室走向现实,从概念变为日常。
技术突破的深远意义在于,FSD V14.2 通过端到端神经网络架构的革命性创新,证明了纯视觉路线的可行性和优越性。4.5-10 倍的模型规模提升、20 倍的可靠性改进、在极端天气下超越人类驾驶员的表现,这些数据充分说明了技术进步的速度和幅度。更重要的是,特斯拉用不到 2000 美元的硬件成本实现了与竞争对手 10 万美元系统相当甚至更优的性能,这种成本优势将彻底改变自动驾驶的商业化进程。
对行业的影响是全方位的。在技术路线上,纯视觉方案的成功将推动整个行业重新思考多传感器融合的必要性;在监管政策上,透明的第三方验证机制为国际标准的制定提供了新思路;在市场格局上,特斯拉的领先地位得到巩固,传统车企面临更大压力;在消费者认知上,自动驾驶的可信度得到前所未有的提升。
与竞品的对比分析显示,FSD V14.2 在技术先进性、成本控制、数据优势等多个维度都处于领先地位。Waymo 虽然在运营规模上有优势,但技术架构的局限性和高昂成本限制了其发展;华为和小鹏在本土化和用户体验上有特色,但在核心技术上仍有差距。
然而,我们也必须清醒地认识到,"一次成功不等于永远安全"。自动驾驶技术仍面临诸多挑战:统计安全性的验证需要更长时间和更多数据;极端边缘场景的处理能力仍需提升;监管政策的完善需要时间;用户接受度的提高需要过程。正如业内专家所言,自动驾驶的终局之战才刚刚开始。
展望未来,自动驾驶技术的发展将呈现以下趋势:
- 1. 技术路线的收敛与分化并存:纯视觉路线的成功将吸引更多追随者,但多传感器融合方案在特定场景仍有优势,技术路线将呈现 "大收敛、小分化" 的格局。
- 2. 数据成为核心资产:拥有最多数据和最强数据处理能力的企业将占据主导地位,数据的质量和规模将成为决定竞争力的关键因素。
- 3. 生态系统的重要性凸显:单一技术的竞争将让位于生态系统的竞争,"硬件 + 软件 + 数据 + 服务" 的完整生态将成为企业的核心竞争力。
- 4. 商业化进程加速:随着技术成熟度的提升和成本的下降,自动驾驶将在未来 3-5 年内进入大规模商用阶段,Robotaxi、智能物流、自动驾驶私家车等应用场景将全面开花。
对于不同的市场参与者,我们提出以下建议:
对投资者:自动驾驶仍是一个高风险、高回报的赛道。建议关注具有技术领先性、数据优势和清晰商业模式的企业,同时注意风险控制。
对汽车制造商:传统车企需要加快转型步伐,要么加大自主研发投入,要么寻求与技术领先企业合作。在这场变革中,犹豫不决将意味着被淘汰。
对科技公司:自动驾驶不仅是技术竞赛,更是生态建设。建议在技术创新的同时,注重数据积累和生态构建。
对政策制定者:建议加快制定适应自动驾驶发展的法规体系,在确保安全的前提下,为技术创新留出空间。同时,要关注自动驾驶对就业、保险、城市规划等领域的影响,提前做好应对预案。
对普通消费者:自动驾驶技术的成熟将带来更安全、更便捷、更经济的出行体验。建议保持开放的心态,积极了解和体验新技术,同时也要理性看待技术的局限性,始终保持安全意识。
David Moss 的旅程已经结束,但自动驾驶的征程才刚刚开始。在这个充满机遇和挑战的时代,让我们共同期待一个更加智能、安全、高效的出行未来。正如特斯拉 AI 软件副总裁 Ashok Elluswamy 所说:"这是世界上首次全自动海岸到海岸驾驶",而这,仅仅是开始。
参考资料
- 1. 深度全景:特斯拉FSD v14.2“零接管横穿美国”事件全解析_棉花不爱糖
- 2. 特斯拉FSD首次横穿美国,Model3一万英里零干预,马斯克预言兑现_机器之心Pro
- 3. 搭载FSD14的特斯拉车能横跨美国零人工干预,自主驾驶了4397公里_贝小贝沃
- 4. 人类首次“躺平”横穿美国 自动驾驶新纪元_中华网
- 5. 12月31日, 特斯拉 车主David Moss成功完成了一次横跨美国东西海岸的自驾游,全程均使用FSD监督版完成。Da...
- 6. 特斯拉车主使用FSD完成零干预横跨美国东西海岸的全自动驾驶:全程4400公里|人驾驶出租车|全自动驾驶|埃隆_马斯克|特斯拉(公司)|美国|自动驾驶系统|西海岸|零干预_手机网易网
- 7. 全程零干预!特斯拉车主自动驾驶横穿美国纪录 马斯克:酷-快科技-科技改变生活
- 8. 特斯拉FSD贯穿美国,国内厂商这波跟不跟?_易车
- 9. 特斯拉FSD v14首次零干预横跨美国-中关村在线
- 10. 马斯克10年梦成真!特斯拉全球首次自动驾驶横穿美国,人类0接管_新智元
- 11. 4400km 零接管:特斯拉车主完成首次 FSD 跨美国东西海岸穿越壮举,马斯克点赞
- 12. 特斯拉FSD首次横穿美国,实现1万英里零干预,马斯克预言兑现了_车享人生
- 13. 特斯拉FSD 68小时零接管横穿美国!中国L3上路,全球赛道变天_万物说
- 14. 全程零接管!特斯拉FSD V14.2横穿美国,自动驾驶能完全替代人类?_小了白了兔
- 15. Tesla FSD Makes History With First Fully Autonomous Coast-to-Coast Drive
- 16. Tesla Owner Logs 10,000+ Consecutive Miles on FSD Without a Single Intervention
- 17. Tesla FSD Drives Coast-to-Coast Without Human Intervention, Full Story
- 18. Tesla Model 3 Achieves Cross-Country Drive with Full Self-Driving (FSD)
- 19. 特斯拉车主使用FSD完成零干预横跨美国东西海岸的全自动驾驶:全程4400公里
- 21. 三大要点看Tesla FSD V14-拓荒牛-中关村国际人才会客厅-拓荒族
- 22. Tesla FSD v14 – Update soll „lebt fühlen“ alle Details
- 23. Tesla FSD V14: The Future of Autonomous Diving is Here with Transformers!
- 24. Understanding Tesla’s FSD Evolution: Promise of v14.2 and Addressing User Complaints
- 25. Tesla FSD 14 released for HW4 vehicles with Sloth driving mode and parking spot selection
- 26. テスラ、完全自動運転FSD v14で大幅アップデート!ロボタクシー式降車機能&リアルタイム迂回対応
- 27. Tesla Full Self-Driving v14 disappoints with hallucinations, brake stabbing, and speeding
- 28. 2025.44.25.5 FSD v14.2.1.25 Release Notes
- 29. 2025年12月24日,特斯拉正式向车主推送FSD(监督版)
- 30. 特斯拉最新FSD V14.2的功能更新和回退项目 - OFweek新能源汽车网
- 31. 【文章】特斯拉FSD年底大更新!马斯克放话5年后比人类安全100倍_车家号_汽车之家
- 32. 特斯拉最新FSD推送,英伟达机器人主管:分不清人还是AI在开-电子工程专辑
- 33. 特斯拉推送 FSD(监督版)v14.2.2:提升行驶平顺性、增强障碍物识别能力
- 34. 特斯拉迄今最好FSD推送 网友连测10小时:太满意 根本停不下来_懂车帝
- 35. 深度全景:特斯拉FSD v14.2“零接管横穿美国”事件全解析_棉花不爱糖
- 36. Tesla FSD (Supervised) v14.2.2 starts rolling out
- 37. Tesla Software Release 2025.45.7
- 38. Tesla AI team burns the Christmas midnight oil by releasing FSD v14.2.2.1
- 39. Tesla FSD V14: A key step towards "unsupervised driving" - EEWORLD
- 40. 特斯拉推送FSD v14.2.2:提升行驶平顺性、增强障碍物识别能力_IT之家
- 41. FSD V14.2颠覆体验:特斯拉如何终结变道迟疑?_网通社号
- 43. David A. Moss - Faculty & Research - Harvard Business School
- 45. David Moss - Head of European Equities Research Strategy | LinkedIn
- 48. 特斯拉车主靠FSD零人工干预 横跨美国大陆_新浪财经
- 49. Tesla FSD Drives Coast-to-Coast Without Human Intervention, Full Story
- 50. Tesla FSD successfully completes full coast-to-coast drive with zero interventions
- 51. Revolutionary Milestone: The First Fully Autonomous Coast-to-Coast Drive Across the USA
- 52. 特斯拉FSD v14首次零干预横跨美国-中关村在线
- 53. 搭载FSD14的特斯拉车能横跨美国零人工干预,自主驾驶了4397公里_贝小贝沃
- 54. 零接管横穿美国,特斯拉FSD已通过“物理图灵测试”?-虎嗅网
- 55. Tesla FSD Achieves Historic Zero-Intervention Coast-to-Coast Drive
- 56. FSD 12.5.6: Tesla (TSLA) fixes a 4-year-old bug, Driver Profiles explained, first impressions
- 57. 特斯拉财报电话会议实录:马斯克回归、押注自动驾驶和机器人、目标5秒造一辆车-腾讯新闻
- 58. 特斯拉电话会:今年将是历史最重要一年,FSD重大突破,机器人业务未来可能超过汽车
- 62. Tesla Driver Completes Coast-To-Coast FSD Drive Without Human Intervention
- 63. Man claims to be first person in the world to complete fully autonomous US coast-to-coast journey with Tesla's Full Self Driving
- 64. Tesla FSD Drives Coast-to-Coast Without Human Intervention, Full Story
- 66. 横穿美国,不碰方向盘——马斯克10年前吹的牛,终于实现|传统燃油车|埃隆_马斯克|方向盘|特斯拉|美国|自动驾驶技术_手机网易网
- 67. 有些特粉挖出来这位车主David是从事激光雷达销售工作的,就认为这是纯视觉胜过激光雷达的又一证据,连木头姐这个傻鸟都跟着...
- 68. 特斯拉FSD首次横穿美国,Model3一万英里零干预,马斯克预言兑现_机器之心Pro
- 69. The First Coast-to-Coast Autonomous Car Ride
- 70. 深度全景:特斯拉FSD v14.2“零接管横穿美国”事件全解析_棉花不爱糖
- 71. Tesla FSD Drives Coast-to-Coast Without Human Intervention, Full Story
- 72. Tesla FSD Drives 9,000 Miles Without Intervention, Owner Documents Coast-to-Coast Journey
- 73. 特斯拉FSD首次横穿美国,Model3 1万英里零干预,马斯克预言兑现|人驾驶出租车|何小鹏|埃隆_马斯克|无人驾驶|特斯拉|美国|自动驾驶_手机网易网
- 74. 方向盘自己转动!特斯拉车主刷屏全球,68小时零干预横穿美国_商业风向标
- 76. 2天20小时、零接管横穿美国,特斯拉FSD已通过“物理图灵测试”?|人驾驶出租车|埃隆_马斯克|接管|物理图灵测试|特斯拉fsd|美国|自动驾驶技术|自动驾驶系统_手机网易网
- 77. 特斯拉FSD v14首次零干预横跨美国-中关村在线
- 78. 马斯克10年梦成真!特斯拉全球首次自动驾驶横穿美国,人类0接管_新智元
- 79. 4400km 零接管:特斯拉车主完成首次 FSD 跨美国东西海岸穿越壮举,马斯克点赞|特斯拉|马斯克|莫斯_新浪科技_新浪网
- 80. 全程零干预!特斯拉Model 3完成自动驾驶横穿美国壮举,马斯克点赞_星星有言
- 81. 特斯拉实现全程无干预自动驾驶横跨美国并加速推进Robotaxi布局- DoNews
- 82. 零干预 特斯拉车主自动驾驶横穿美国纪录 - 车质网
- 83. 2天20小时、零接管横穿美国,特斯拉FSD已通过“物理图灵测试”?_阿峰故事会
- 84. 再见了,百年汽车工业!特斯拉这一仗,把全球车企逼到了悬崖边_富足松鼠鼠
- 85. Tesla FSD Makes History With First Fully Autonomous Coast-to-Coast Drive
- 86. Tesla FSD successfully completes full coast-to-coast drive with zero interventions
- 87. 테슬라 FSD v14 ‘자동회귀’가 뭐길래? 이제 보행자, 주변 차량의 몇 초 뒤 미래를 예측한다!
- 88. Tesla revoluciona la conducción autónoma con la FSD V14
- 89. 美国特斯拉车主创造历史!自动驾驶突破1万英里,马斯克亲自转发_眼观界地无限
- 90. 特斯拉FSD北京实测,整体表现优秀,极端情况仍有待进化_车家号_汽车之家
- 91. FSD V14 . 2 实测 暴击 V14 . 3 才 是 最后 拼图 零 干预 成 “ 日常 ” ; 五大 进步 : 为什么 大家 都 说 “ 像 黄油 一样 顺滑 ” ? ; 唯一 痛点 : 停车场 表现 “ 回归 ” ; 马斯克 : V14 . 2 不是 终点 , V14 . 3 才 是 “ 最后 拼图 ” ; # 马斯克 # fsd
- 94. 在 美国 我 花 了 4 小时 试驾 了 特斯拉 FSD V14 . 2 , 最新 版本 已经 让 我 看到 了 L4 无人 驾驶 已经 近在眼前 # 大有 学问
- 95. 特斯拉FSD城区及乡道复杂路况实测应对表现
- 99. Tesla Rolls Out FSD v14.2.2 With Smoother Driving and More Confident Lane Changes
- 100. 特斯拉圣诞加班推FSD v14.2.2.1,雨天山路实测性能超多数人类驾驶员_搜狐网
- 101. 特斯拉FSD v14.2.2.1实测:雨天驾驶能力实现对人类驾驶员的超越_联阅智驾
- 102. FSD V14.2颠覆体验:特斯拉如何终结变道迟疑?_网通社号
- 103. 特斯拉圣诞夜推FSD v14.2.2.1,雨天实测表现惊艳-网通社汽车
- 104. FSD v14 已经 无惧 极端 暴雨 天气 ? # fs dv 14 # 特斯拉 fsd 入华 国产 智 驾 会 慌 吗 # 自动 驾驶 # 激光 雷达 汽车 之 眼 # 特斯拉 fsd 最新 版本 实测
- 105. 马斯克10年梦成真!特斯拉全球首次自动驾驶横穿美国,人类0接管_新智元
- 106. 揭秘!特斯拉最新自动驾驶系统实测:雨天能见度不足50米精准识别
- 107. 深度全景:特斯拉FSD v14.2“零接管横穿美国”事件全解析_棉花不爱糖
- 108. FSDとオートパイロットが一体化?テスラが描く新アーキテクチャ
- 109. Tesla FSD V14: A key step towards "unsupervised driving" - EEWORLD
- 110. COMPUTE AND REDUNDANCY SOLUTION FOR THE FULL SELF-DRIVING COMPUTER(pdf)
- 111. Tesla por fin lanza la versión 14 del FSD y eso es un gran avance
- 112. Tesla FSD 14 rilasciato per i veicoli HW4 con modalità di guida Sloth e selezione del posto auto
- 113. 特斯拉FSD V14.2:一场智能驾驶的“史诗级迭代”与现实考题_从小就驴0917
- 114. Tesla's FSD v14 and the Road to Autonomous Dominance: Strategic Alignment Between AI Innovation and Investor Returns
- 115. Tesla’s FSD Drives Coast to Coast Without Manual Input
- 116. Tesla Full Self-Driving v14 disappoints with hallucinations, brake stabbing, and speeding
- 117. Tesla's FSD v14: A Leap Forward, But Rain and Hardware Limitations Loom
- 118. Software Reliability Growth Models Predict Autonomous Vehicle Disengagement Events
- 119. Tesla FSD Drives 9,000 Miles Without Intervention, Owner Documents Coast-to-Coast Journey
- 120. (Mis-)use of standard Autopilot and Full Self-Driving (FSD) Beta: Results from interviews with users of Tesla's FSD Beta
- 121. 【文章】特斯拉FSDv14内测启动,拟人驾驶达人类3倍?_车家号_汽车之家
- 122. 「分享下」_澳门威斯人官网-welcome
- 123. 特斯拉FSD V14深度解析:自回归Transformer领衔,自动驾驶技术再进化_搜狐网
- 124. 特斯拉 FSD V14:走向“无人监督驾驶”的关键一步_烟烟聊智车
- 125. 特斯拉FSD V14推送:AI算力暴涨10倍 中国本土化仍需时间_191506129V
- 126. 特斯拉 FSD V14 落地!Robotaxi 技术下放,HW3 车主无缘?_懂车帝
- 127. Tesla Cybertruck owners share first impressions of FSD v14.1.7 (videos)
- 128. Tesla Owner Logs 10,000+ Consecutive Miles on FSD Without a Single Intervention
- 129. Tesla's FSD v14 and the Road to Autonomous Dominance: Strategic Alignment Between AI Innovation and Investor Returns
- 130. Tesla releases FSD v14, first major update in a year, here’s what it can do
- 132. Tesla FSD Supervised v14.2.2 Begins Rollout with Major Vision and Navigation Upgrades
- 133. Tesla’s FSD Drives Coast to Coast Without Manual Input
- 134. FSD v14 : Tesla atteint ses limites, et Elon Musk le sait
- 135. 特斯拉推送FSD v14.2.2_综合专题_懂车帝
- 136. FSD V14 . 2 实测 暴击 V14 . 3 才 是 最后 拼图 零 干预 成 “ 日常 ” ; 五大 进步 : 为什么 大家 都 说 “ 像 黄油 一样 顺滑 ” ? ; 唯一 痛点 : 停车场 表现 “ 回归 ” ; 马斯克 : V14 . 2 不是 终点 , V14 . 3 才 是 “ 最后 拼图 ” ; # 马斯克 # fsd
- 137. 何小鹏赌约:明年追不上特斯拉FSD,负责人金门大桥裸奔_车圈老炮
- 138. 特斯拉FSD v14.2.2.1实测:雨天驾驶能力实现对人类驾驶员的超越_联阅智驾
- 139. 特斯拉推送FSD v14.2.2:提升行驶平顺性、增强障碍物识别能力!_人与财福
- 140. FSD v14 已经 无惧 极端 暴雨 天气 ? # fs dv 14 # 特斯拉 fsd 入华 国产 智 驾 会 慌 吗 # 自动 驾驶 # 激光 雷达 汽车 之 眼 # 特斯拉 fsd 最新 版本 实测
- 141. 特斯拉圣诞夜推FSD v14.2.2.1,雨天实测表现惊艳-网通社汽车
- 142. 深度全景:特斯拉fsdv14.2“零接管横穿美国”事件全解析
- 143. 马斯克Robotaxi放弃安全员,让世界自动驾驶技术选择走到十字路口_率真星辰oNk4j
- 144. 神经网络驾驶术:特斯拉FSD核心算法架构全解析_懂车帝
- 145. ai研究-123fsdv14深度解析:纯视觉sdf与端到端相比v12具体升级
- 146. 特斯拉FSD算法技术解读-国内FSD测试特斯拉真输了么?-电子工程专辑
- 147. AI研究-124 Tesla FSD V14 深度解析:城市/高速表现与关键接管数据-CSDN博客
- 148. 特斯拉通过「物理图灵测试」,英伟达机器人主管爆吹,圣诞节刷屏了_36氪
- 149. 商业狂飙与技术暗礁,Waymo的2025年冰火_易车
- 150. New Insights for Scaling Laws in Autonomous Driving
- 151. Future Mobility Starts in Washington
- 152. Waymo Hits 450K Robotaxi Rides Weekly: 2x in 6 Months
- 153. Waymo’s Freeway Triumph: How Alphabet’s Robotaxis Are Outpacing Tesla’s Promises
- 154. Waymo's Robotaxis Learn to Drive Like Humans – And It Might Just Be Making Roads Safer
- 156. 旧金山大停电:Waymo 的“逻辑死锁”与特斯拉 FSD 的“进化时刻”_瀛涯胜览
- 157. 在资本赛道狂飙,在漆黑路口熄火:Waymo的2025扩张悖论-电子工程专辑
- 158. 旧金山大停电致Waymo无人车集体趴窝,背后的技术短板与中美差异_万界纵横
- 159. Waymo玩明白了!全新多模态端到端算法EMMA:感知规划一网打尽~-CSDN博客
- 160. Waymo获内华达州全面运营许可 加速无人出租车商业化进程_LVHAO吕昊
- 161. 2025年智能驾驶的全面突破:从技术迭代到产业重构_懂车帝
- 162. 3D感知(11)Waymo研发经理:《自动驾驶感知前沿技术介绍》_scalable perception-CSDN博客
- 163. Waymo begins robotaxi tests in Philadelphia and NYC
- 164. Google、自動運転タクシーをさらに10都市で拡大!テスラ意識か
- 165. Waymo receives permit to test robotaxis in New York City
- 166. Waymo to expand autonomous driving tests across 10 new cities
- 167. Alphabet’s Waymo to test its autonomous driving technology in over 10 new cities

