4.1 不同自动驾驶场景对地图的需求情况
自动驾驶地图的主要应用场景
自动驾驶地图对应的主要应用场景:乘用车NOA对自动驾驶地图的需求
自动驾驶地图对应的主要应用场景:乘用车(L3/L4)无人驾驶对自动驾驶地图的需求
自动驾驶地图对应的主要应用场景:乘用车低速自主泊车对自动驾驶地图的需求
自动驾驶地图对应的主要应用场景:无人驾驶载物对自动驾驶地图的需求
4.2 主机厂对自动驾驶地图的选择
主机厂的自动驾驶地图选择(1)
主机厂的自动驾驶地图选择(2)
主机厂的自动驾驶地图选择(3)
主机厂的自动驾驶地图选择(4)
主机厂的自动驾驶地图选择(5)
4.3 主机厂自动驾驶地图的装配情况
自主品牌量产乘用车智驾地图搭载情况(1)
自主品牌量产乘用车智驾地图搭载情况(2)
自主品牌量产乘用车智驾地图搭载情况(3)
...................
自主品牌量产乘用车智驾地图搭载情况(10)
自主品牌量产乘用车智驾地图搭载情况(11)
自主品牌量产乘用车智驾地图搭载情况(12)
合资品牌量产乘用车智驾地图搭载情况(1)
合资品牌量产乘用车智驾地图搭载情况(2)
4.4 特斯拉
特斯拉自动驾驶软件和地图方案演进趋势总结
特斯拉在线建图和实时生成式地图布局
特斯拉自动驾驶软件:“端到端”技术路线
特斯拉自动驾驶软件:算法端迭代
特斯拉自动驾驶软件: Occupancy Networks(占用网络) 感知技术
特斯拉自动驾驶软件:纯视觉解决方案(1)
特斯拉自动驾驶软件:纯视觉解决方案(2)
特斯拉依托AI技术实现高精度地图(HD MAP)的实时构建与更新
特斯拉FSD方案采用SD地图(1)
特斯拉FSD方案采用SD地图(2)
4.5 小米
小米汽车自动驾驶软件和地图方案演进趋势总结
小米汽车在线建图和实时生成式地图布局
小米SU7以高精度地图(HD MAP)为安全冗余
小米自动驾驶地图:从高精度地图(HD MAP)到端到端
小米端到端大模型采用“三层建模”架构构建物理世界模型
小米端到端大模型采用“三层建模”架构的建模方法
小米汽车数据闭环:物理世界建模
4.6 小鹏
小鹏汽车自动驾驶软件和地图方案演进趋势总结
小鹏汽车在线建图和实时生成式地图布局
小鹏XNGP升级“无图”方案(1)
小鹏汽车自动驾驶软件:新一代感知架构 “X Net”
小鹏XNGP升级“无图”方案(2)
小鹏XNGP升级“无图”方案(3)
小鹏汽车自动驾驶软件:基于XNet自主开发全自动标注系统
小鹏汽车高精地图(HD MAP)方案
小鹏汽车自动驾驶软件:“云端大模型”路线
小鹏汽车云端训练基座:小鹏汽车研发“世界基座模型”(1)
小鹏汽车云端训练基座:小鹏汽车研发“世界基座模型”(2)
小鹏汽车云端训练基座:小鹏汽车研发“世界基座模型”(3)
小鹏汽车云端训练基座:小鹏汽车研发“世界基座模型”(4)
小鹏汽车云端训练基座:小鹏汽车研发“世界基座模型”(5)
4.7 理想
理想汽车自动驾驶软件和地图方案演进趋势总结
理想汽车在线建图和实时生成式地图布局
理想AD Max 3.0升级“无图”方案
理想使用在线建图技术(1)
理想使用在线建图技术(2)
理想汽车闭环仿真系统(1)
理想汽车闭环仿真系统(2)
理想汽车闭环仿真系统(3)
4.8 蔚来
蔚来汽车自动驾驶软件和地图方案演进趋势总结
蔚来在线建图和实时生成式地图布局
蔚来汽车自动驾驶软件:世界模型NWM(1)
蔚来汽车自动驾驶软件:世界模型NWM(2)
4.9 华为鸿蒙智行
华为自动驾驶软件和地图方案演进趋势总结
华为在线建图和实时生成式地图布局
华为自动驾驶软件:乾崑ADS 4.0(1)
华为自动驾驶软件:乾崑ADS 4.0(2)
华为自动驾驶软件:乾崑ADS 3.0 特点(1)
华为自动驾驶软件:乾崑ADS 3.0 特点(2)
华为自动驾驶软件:华为乾崑智驾系统 ADS SE版本
华为自动驾驶软件:华为乾崑智驾ADS SE与ADS高阶版方案对比
华为自动驾驶软件:“无图”方案
华为自动驾驶软件: Petal Maps
华为自动驾驶软件:“无图”方案
华为自动驾驶软件: Petal Maps
华为AI 技术的应用:车端世界行为模型
4.10 上汽智己
智己自动驾驶软件和地图方案演进趋势总结
智己在线建图和实时生成式地图布局
智己自动驾驶软件:智己+Momenta深度合作NOA
智己自动驾驶软件:IM AD3.0 智驾方案(1)
智己自动驾驶软件:IM AD3.0 智驾方案(2)
智己自动驾驶软件:IM AD3.0 智驾方案(3)
智己自动驾驶软件:“量产级”Robotaxi3.0
上汽对高精地图的应用
上汽在线建图技术
4.11 零跑
零跑汽车自动驾驶软件和地图方案演进趋势总结
零跑在线建图和实时生成式地图布局
零跑汽车自动驾驶软件:LEAP3.5 智驾方案
零跑逐步向轻地图方案演进
零跑低成本地图方案
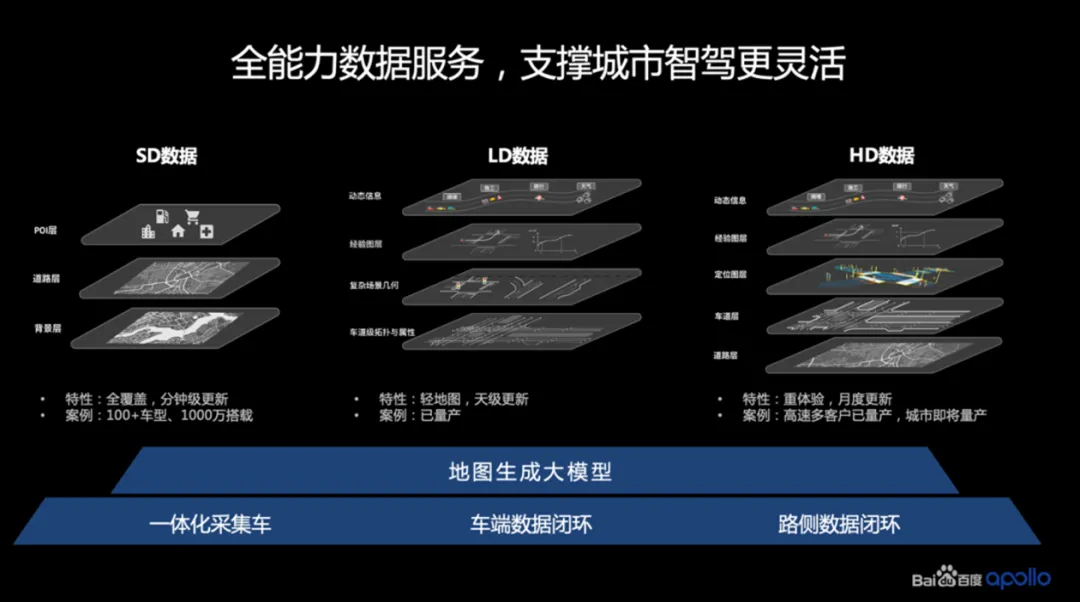
百度LD地图最新应用动态:接入零跑LEAP 3.5技术架构
4.12 吉利&极氪
极氪自动驾驶软件和地图方案演进趋势总结
极氪在线建图和实时生成式地图布局
极氪自动驾驶软件:泛世界模型
极氪自动驾驶软件:极氪千里浩瀚
极氪自动驾驶软件: MLM多模态大模型
极氪自动驾驶软件: G-AES通用障碍物连续自动避让功能
极氪自动驾驶软件:浩瀚智驾2.0(1)
极氪自动驾驶软件:浩瀚智驾2.0(2)
极氪自动驾驶软件:极氪×Mapbox 实时云导航系统
4.13 东风岚图
东风岚图自动驾驶软件和地图方案演进趋势总结
东风岚图在线建图和实时生成式地图布局
东风岚图基于导航地图(SD MAP)实现智驾方案
东风岚图汽车自动驾驶软件:百度地图V20视觉车道级导航
东风岚图系列对智驾地图的应用
东风风行星海系列对智驾地图的应用
4.14 长安汽车
长安汽车自动驾驶软件和地图方案演进趋势总结
长安汽车在线建图和实时生成式地图布局
长安汽车自动驾驶软件:天枢智架(1)
长安汽车自动驾驶软件:天枢智驾(2)
长安汽车自动驾驶软件:天枢智驾(3)
阿维塔自动驾驶软件:华为Petal Maps
4.15 奇瑞汽车
奇瑞汽车自动驾驶软件和地图方案演进趋势总结
奇瑞汽车在线建图和实时生成式地图布局
奇瑞星纪元智驾方案从“有图”走向“无图”
奇瑞汽车自动驾驶软件:奇瑞汽车智驾软件业务布局规划
奇瑞汽车自动驾驶软件: Chery Pilot 4.0 技术特点
奇瑞汽车自动驾驶软件:猎鹰智驾系列(1)
奇瑞汽车自动驾驶软件:猎鹰智驾系列(2)
奇瑞汽车自动驾驶软件:猎鹰智驾系列(3)
奇瑞汽车自动驾驶软件:猎鹰智驾系列(4)
4.16 长城汽车
长城汽车自动驾驶软件和地图方案演进趋势总结
长城汽车在线建图和实时生成式地图布局
长城汽车自动驾驶软件: Coffee Pilot Ultra系统
长城汽车自动驾驶软件: SEE端到端智驾大模型
长城汽车自动驾驶软件:高德地图×长城汽车 出行联合创新LAB
4.17 广汽乘用车
广汽乘用车自动驾驶软件和地图方案演进趋势总结
广汽乘用车在线建图和实时生成式地图布局
广汽乘用车自动驾驶软件:五大智驾产品平台
广汽乘用车自动驾驶软件:VLA模型
广汽乘用车自动驾驶软件: ADiGO PILOT感知算法
广汽乘用车自动驾驶软件:“端云一体”的自动驾驶轻地图解决方案
广汽依赖导航地图(SD MAP)的“无图智驾”方案
广汽Aion高精度地图(HD MAP)的解决方案
广汽Aion电子视野线系统
广汽Aion高精度地图(HD MAP)曲率和坡度
广汽申请在线建图专利
4.18 大众汽车
大众汽车自动驾驶软件和地图方案演进趋势总结
大众在线建图和实时生成式地图布局
大众汽车自动驾驶软件:自研AI高阶智驾系统
大众汽车自动驾驶软件:大众智驾平权的产品路线(1)
大众汽车自动驾驶软件:大众智驾平权的产品路线(2)
大众汽车自动驾驶软件:大众智驾平权的产品路线(3)
大众汽车自动驾驶软件:大众智驾平权的产品路线(4)
4.19 奔驰
奔驰自动驾驶软件和地图方案演进趋势总结
奔驰在线建图和实时生成式地图布局
奔驰自动驾驶软件:自动驾驶软件开发模式
奔驰自动驾驶软件:“无图” L2++高级智驾
4.20 宝马
宝马自动驾驶软件方案和供应链搭建
宝马在线建图和实时生成式地图布局
宝马自动驾驶软件:Personal Pilot L3级自动驾驶特征
宝马自动驾驶软件: L2+与L3自动驾驶系统
宝马自动驾驶软件:宝马新世代车型智驾规划
4.21 丰田
丰田汽车自动驾驶软件方案和供应链搭建
丰田在线建图和实时生成式地图布局
丰田汽车自动驾驶软件:铂智3X 全场景智驾
丰田汽车自动驾驶软件: L4级自动驾驶演进