作者:Haitao Chen, Yiqi Zhang
知识搬运工:薄楷伦
研究发现,在人类车辆(HV)与自动驾驶汽车(AV)共享道路的混合交通中,AV的驾驶风格会显著影响人类驾驶员的行为。一个反直觉的现象是:攻击型的人类驾驶员在面对攻击型AV时,反而会减少攻击性决策;而面对“礼貌”的防御型AV时,他们却更容易表现出攻击性。此外,人类驾驶员对防御型AV的信任度更低、风险感知更高。这表明,一味追求“安全礼貌”的AV算法可能适得其反适度“自信”的驾驶风格或能更有效地引导交通流、减少冲突。研究为AV算法设计和混合交通管理提供了关键的人因心理学依据。
随着自动驾驶汽车逐步上路,未来很长一段时间内,道路将是AV与人类驾驶车辆(HV)共存的“混合交通”环境。当前的AV通常被设计为“防御型驾驶风格”(谨慎、礼让、安全第一),但这带来了一个新问题:人类司机会不会觉得AV“好欺负”,从而对其做出更多攻击性行为(如加塞、抢行)?
既有调查显示,人类驾驶员确实对AV表现出更强的攻击意图。但AV的驾驶风格(攻击型 vs. 防御型)如何与人类驾驶员自身的驾驶风格相互作用,进而影响其真实决策、驾驶表现和主观感受,尚不明确。
本研究旨在通过模拟驾驶实验,探究以下核心问题:
AV的不同驾驶风格,如何影响不同驾驶风格(攻击型/中庸型/防御型)的人类驾驶员?
这种交互作用,是减少还是加剧了混合交通中的攻击性行为?
人类驾驶员对不同类型的AV,在信任和风险感知上有何差异?
图1. 驾驶模拟器
2.1 参与者
36名持有驾照的驾驶员,根据“攻击性驾驶量表(ADS)”分数被分为攻击型、中庸型和防御型三组。
2.2 实验设计
自变量:
AV驾驶风格(攻击型 vs. 防御型):通过预设的加速、减速、跟车距离、路权决策等参数实现。
人类驾驶员风格(攻击型 vs. 中庸型 vs. 防御型):通过ADS分数测量。
场景:设计了4个典型互动场景(2个城市道路,2个高速公路),如无信号灯路口转弯、高速并线等。
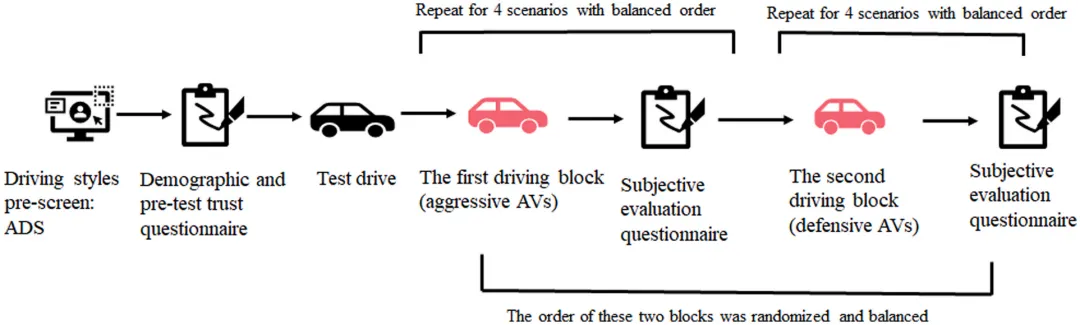
图2. 实验流程
测量指标:
决策:驾驶员选择“攻击性”还是“防御性”行为(如抢行 vs. 让行)。
驾驶表现:以最小碰撞时间(minTTC)衡量攻击性,时间越短越危险。
主观评价:每次互动后,评估对AV的信任度和风险感知。
3.1 决策:“以刚克刚”,攻击型AV“镇住”了攻击型司机
关键发现:攻击型的人类驾驶员在面对攻击型AV时,做出攻击性决策的可能性**显著低于**面对防御型AV时。
解读:这类似于一种“威慑”效应。当人类驾驶员感知到AV也“不好惹”时,会倾向于收敛自己的攻击性。而防御型AV的“谦让”则可能被视为可乘之机。
对比:防御型驾驶员的决策则不受AV风格影响,始终保持谨慎。
3.2 驾驶表现:防御型AV引发了更危险的跟车行为
关键发现:所有驾驶员与防御型AV互动时,最小碰撞时间(minTTC)更短,意味着跟车更紧、驾驶行为更激进。
解读:防御型AV过慢或过于犹豫的速度,可能打乱了人类驾驶员的预期节奏,引发急躁和冒险的超车或跟进行为,反而增加了安全风险。
3.3 信任与风险:吃力不讨好的“好人”AV
关键发现:人类驾驶员对防御型AV的信任度更低,同时风险感知更高。
解读:这与直觉相反。防御型AV本意为安全,但其行为可能被解读为不可预测、犹豫不决或阻碍交通流,从而引发了人类驾驶员的不信任和不安。
差异:这种效应在中庸型驾驶员身上最明显。攻击型驾驶员则对两种AV的信任度都较低。
3.4 环境差异:高速公路让互动更“宽松”
驾驶员在高速公路场景中与AV的最小碰撞时间(minTTC)普遍更长(相比城市道路)。
这表明驾驶环境本身调节了互动压力,也为AV分场景调整驾驶策略提供了依据。
这项研究揭示了混合交通情境下人—车互动所蕴含的复杂社会心理机制,并对自动驾驶车辆(AV)的系统设计与交通管理实践提出了若干启示。
1.AV的决策算法有必要引入更高层次的情境感知能力与风格调节机制。未来的AV不宜长期固守单一的防御性策略,而应在满足安全约束的前提下,依据交通场景特征(如城市道路与高速公路)以及周围车辆的行为风格,动态调整自身驾驶策略。在特定情境中,适度清晰地表达通行意图与路权主张,反而可能有助于减少互动不确定性,提升整体交互的可预测性与安全性。
2.混合交通环境下“安全”的内涵有必要被重新审视。将安全简单等同于极端保守的驾驶行为,可能忽视了交互效率与行为可理解性在交通系统中的重要作用。过度谨慎、频繁让行或犹豫的AV行为,可能打乱交通流并引发人类驾驶员的困惑甚至焦躁,从而间接增加冲突风险。因此,安全驾驶应被理解为在风险控制与交互协调之间取得平衡的过程。
3.混合交通的有效运行不仅依赖于技术进步,也有赖于制度与认知层面的配套支持。交通管理部门有必要针对人车混行情境,探索并完善相应的规则与管理框架。同时,公众教育同样关键:帮助人类驾驶员理解AV的行为逻辑与决策边界,有助于建立更稳定的预期,减少因误解或不确定性引发的攻击性行为与不信任感。
4.未来研究仍有广阔的拓展空间。例如,可进一步考察处于连续谱上的AV驾驶风格,而非简单的激进—保守二分;引入天气、车流密度等更贴近真实交通环境的因素;关注长期接触AV后人类驾驶员在态度与行为层面的适应过程;同时,车辆外观或标识线索(如颜色或显著的AV标识)所引发的心理暗示与期望效应,也值得系统探讨。
本研究证实,在混合交通这场人机共舞中,自动驾驶汽车的“性格”至关重要。一个总是礼让的“老好人”,可能会无意中激发他人的攻击性;而一个在规则内清晰、果断的“伙伴”,则可能更好地引导交通秩序。未来的自动驾驶技术,不仅需要“智慧”的双眼,更需要懂得“社交”的大脑,在安全与效率、礼让与果断之间,找到那个微妙的平衡点。
参考文献
Chen, H., & Zhang, Y. (2026). Mitigating aggression toward AVs in mixed traffic: Effects of automated driving styles and human driving styles. Transportation Research Part F: Traffic Psychology and Behaviour, 116, 103431.

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
