自动驾驶技术正以前所未有的速度重塑交通行业,其背后是一系列复杂而精密的算法体系支撑。本文将系统性地解析自动驾驶八大核心算法,涵盖环境感知、目标检测、语义分割、强化学习以及决策与控制等关键技术,带你从原理到实战全面了解这一领域。
一、自动驾驶算法体系概述
自动驾驶系统通常被分为感知、规划与控制三大模块,其中算法是各模块的“大脑”。完整的算法体系包括:
环境感知算法:激光雷达点云处理、视觉SLAM
目标检测算法:基于CNN的检测器、多传感器融合检测
语义分割算法:全卷积网络、实时分割架构
强化学习算法:基于值函数的方法、策略梯度方法
决策算法:行为决策、轨迹预测
控制算法:PID控制、模型预测控制
这些算法协同工作,使车辆能够理解环境、预测变化并执行安全驾驶动作。
二、环境感知算法:自动驾驶的“眼睛”
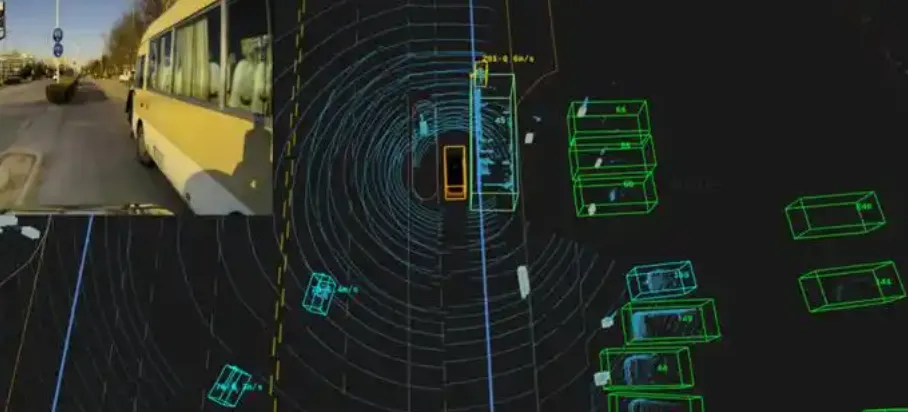
2.1 激光雷达点云处理
激光雷达通过发射激光束并接收反射信号,生成周围环境的3D点云数据。处理这些数据的核心算法包括:
点云分割:使用区域生长算法或深度学习模型(如PointNet)将点云聚类为独立物体
# 基于欧几里得距离的简单点云聚类示例def euclidean_clustering(point_cloud, tolerance=0.02, min_cluster_size=100): tree = spatial.KDTree(point_cloud) clusters = [] unprocessed = set(range(len(point_cloud))) while unprocessed: cluster = [] queue = [unprocessed.pop()] while queue: point_idx = queue.pop(0) cluster.append(point_idx) # 查找邻域点 neighbors = tree.query_ball_point( point_cloud[point_idx], tolerance ) for neighbor in neighbors: if neighbor in unprocessed: unprocessed.remove(neighbor) queue.append(neighbor) if len(cluster) >= min_cluster_size: clusters.append(cluster) return clusters
地面提取:使用RANSAC或网格法分离地面点与非地面点,为障碍物检测奠定基础
2.2 视觉SLAM(同步定位与建图)
视觉SLAM使车辆能够在未知环境中同时定位自身位置并构建环境地图。ORB-SLAM是其中的经典算法:
特征提取:使用ORB(Oriented FAST and Rotated BRIEF)特征检测器提取关键点
特征匹配:通过描述子匹配在不同帧之间建立对应关系
位姿估计:使用PnP(Perspective-n-Point)算法估计相机运动
闭环检测:识别已访问过的地点,优化全局一致性
三、目标检测算法:识别与定位关键物体
3.1 基于CNN的检测框架
两阶段检测器(如Faster R-CNN):
第一阶段:区域建议网络(RPN)生成候选区域
第二阶段:对候选区域进行分类和边界框回归
单阶段检测器(如YOLO、SSD):
将检测视为回归问题,直接预测边界框和类别概率
速度更快,适合实时应用
# YOLO风格的目标检测简化示例class YOLOLayer(nn.Module): def __init__(self, num_classes, anchors, img_dim): super().__init__() self.anchors = anchors self.num_anchors = len(anchors) self.num_classes = num_classes def forward(self, x): # x: [batch, channels, height, width] batch_size = x.size(0) grid_size = x.size(2) # 调整预测张量维度 prediction = x.view( batch_size, self.num_anchors, self.num_classes + 5, grid_size, grid_size ).permute(0, 1, 3, 4, 2).contiguous() # 解构预测值 obj_score = torch.sigmoid(prediction[..., 4]) cls_probs = torch.softmax(prediction[..., 5:], dim=-1) return prediction
3.2 多传感器融合检测
融合摄像头、激光雷达和毫米波雷达数据,提高检测鲁棒性:
前融合:在原始数据层面融合,如将点云投影到图像平面
后融合:各传感器独立检测后融合结果,常用卡尔曼滤波或深度学习融合网络
四、语义分割算法:理解场景的像素级语义
4.1 全卷积网络(FCN)
FCN将传统CNN中的全连接层替换为卷积层,实现任意尺寸输入和像素级预测:
编码器:通过卷积和池化提取多尺度特征
解码器:通过上采样恢复空间分辨率
跳跃连接:融合浅层细节特征与深层语义特征
4.2 实时分割架构
自动驾驶需要实时分割,以下架构在速度与精度间取得平衡:
DeepLab系列:使用空洞卷积扩大感受野,ASPP模块捕捉多尺度上下文
ENet:专为高效推理设计,在Cityscapes数据集上达到实时速度(>10 FPS)
五、强化学习算法:从交互中学习的决策智能
5.1 强化学习基础
自动驾驶中的强化学习框架:
状态:车辆和环境状态(位置、速度、周围物体等)
动作:转向、加速、刹车等控制命令
奖励:安全、效率、舒适度等综合指标
5.2 深度强化学习方法
深度Q网络(DQN):处理高维状态空间,使用经验回放和固定目标网络稳定训练
class DQNAgent: def __init__(self, state_dim, action_dim): self.policy_net = DQN(state_dim, action_dim) self.target_net = DQN(state_dim, action_dim) self.memory = ReplayBuffer(capacity=10000) self.optimizer = optim.Adam(self.policy_net.parameters()) def select_action(self, state, epsilon=0.1): if random.random() > epsilon: with torch.no_grad(): return self.policy_net(state).argmax() else: return random.randrange(self.action_dim)
演员-评论家方法(如A3C、PPO):结合策略梯度与值函数方法的优势,适用于连续动作空间
六、决策与控制算法:安全与高效驾驶的保障
6.1 行为决策算法
有限状态机(FSM):将驾驶行为分解为有限状态(跟车、换道、停车等),根据规则转移
基于场景的决策:使用概率模型(如POMDP)处理不确定性,平衡风险与收益
6.2 轨迹规划算法
A*搜索算法:在结构化环境中规划全局路径
RRT(快速随机树):在高维空间快速探索可行路径
轨迹优化:使用二次规划或样条曲线生成平滑、动态可行的轨迹
6.3 车辆控制算法
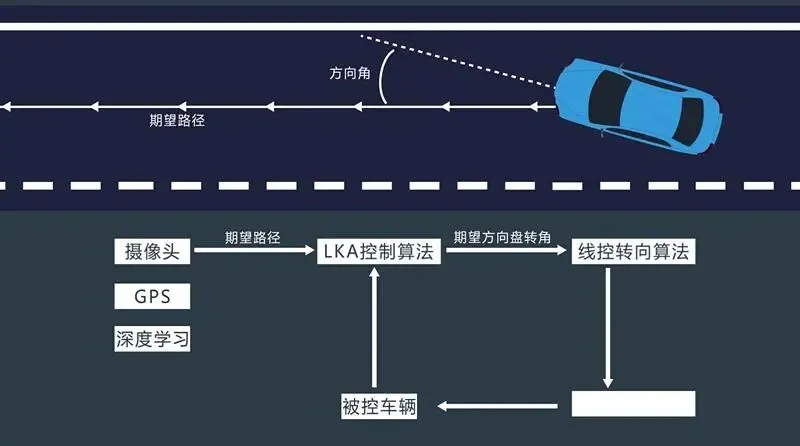
PID控制器:经典反馈控制,简单有效但参数调优复杂
class PIDController: def __init__(self, Kp, Ki, Kd): self.Kp, self.Ki, self.Kd = Kp, Ki, Kd self.prev_error = 0 self.integral = 0 def compute(self, setpoint, measured_value, dt): error = setpoint - measured_value self.integral += error * dt derivative = (error - self.prev_error) / dt output = (self.Kp * error + self.Ki * self.integral + self.Kd * derivative) self.prev_error = error return output
模型预测控制(MPC):
预测未来一段时间内的系统行为
优化控制序列以最小化成本函数
执行第一个控制动作,下一时间步重复
MPC能够显式处理约束(如加速度限制、安全边界),更适合自动驾驶应用。
七、算法集成与实战挑战
7.1 多算法集成框架
现代自动驾驶系统采用分层架构集成各算法:
感知层融合:多传感器数据 → 目标检测与分割 → 环境模型
预测层:轨迹预测 → 行为意图识别
规划层:路由规划 → 行为决策 → 轨迹生成
控制层:轨迹跟踪 → 车辆控制
7.2 实战中的关键挑战
极端天气与光照条件:开发鲁棒的感知算法,使用数据增强和域适应技术
长尾场景处理:收集和合成罕见但关键的场景数据
实时性要求:算法优化与硬件加速(GPU、TPU、专用AI芯片)
安全验证:形式化验证、大规模仿真测试和影子模式部署
八、未来发展趋势
端到端自动驾驶:从传感器数据直接输出控制命令,减少模块间误差累积
多任务学习:共享主干网络同时执行检测、分割、深度估计等任务
车路协同:车辆与基础设施通信,获得超越视觉范围的感知能力
可解释AI:提高决策透明度,建立用户信任并满足监管要求
终身学习:车辆在生命周期中持续学习适应新环境
结语
自动驾驶算法体系是一个复杂而精密的系统,各算法模块协同工作,共同实现安全、舒适的自动驾驶体验。从环境感知到决策控制,每个环节的技术突破都在推动整个行业向前发展。未来,随着算法不断创新和硬件算力提升,完全自动驾驶的实现将不再遥远。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
