自动驾驶的安全性和舒适度,全靠规控模块的“神操作”!油门/刹车的精准控制、弯道的平稳转向、动态避障的路径规划,背后都是PID、LQR、MPC等算法的数学逻辑与工程落地的结合。
作为自动驾驶工程师,你是否常遇这些痛点:轨迹跟踪参数难调、车辆易偏离顿挫;MPC算法公式难懂,无法结合车辆动力学落地;面试/工作中答不清规控核心问题,缺乏“理论+实战”的系统学习路径。
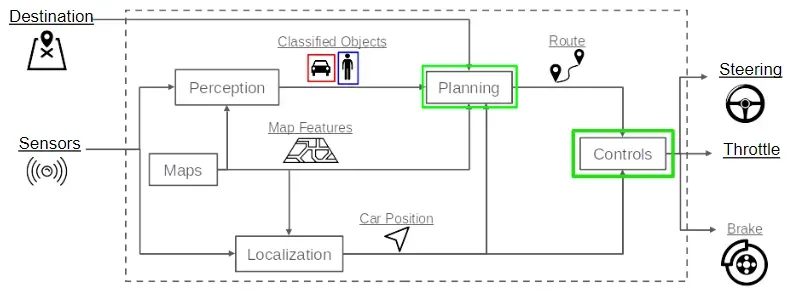
(自动驾驶算法结构图)
实则自动驾驶规控的核心,从不是记算法名称,而是吃透数学原理、掌握工程落地——车辆建模、算法选型与参数整定,皆离不开数学与控制理论,细节直接决定落地效果。目前工业界广泛应用的规控算法,如控制侧的PID、LQR、MPC,以及规划侧的 A*、Dijkstra、有限状态机和 Lattice Planner 等,网上虽有许多介绍其基础思路,但将系统化理论与可实践的 C++ 代码深度结合的内容依然稀缺。
为了便于大家学习,深蓝学院邀请了具有10年以上规划控制研发经验的乌宁博士,开设了《自动驾驶控制与规划》线上课程。
扫码添加,了解详情
抢占学习名额
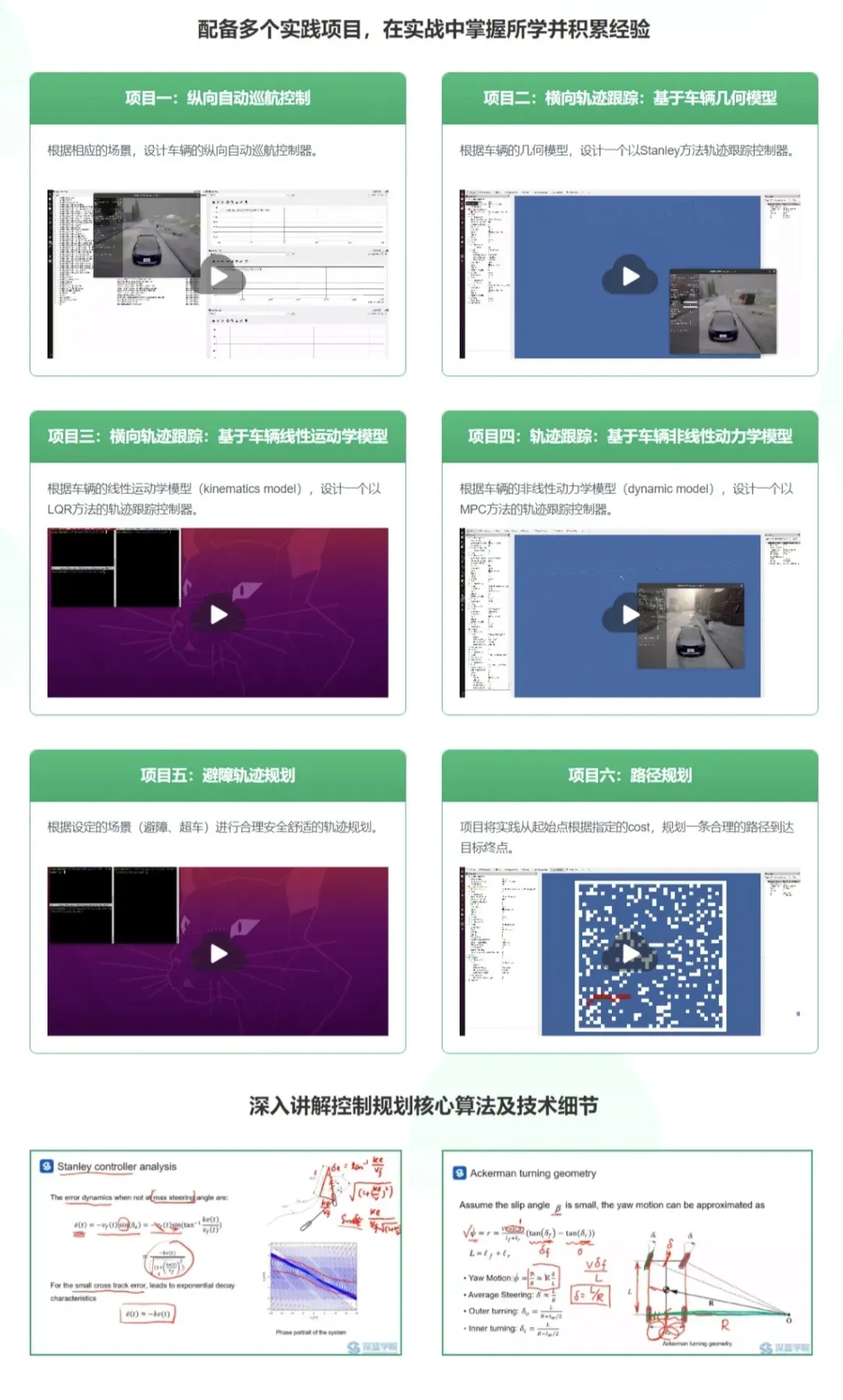
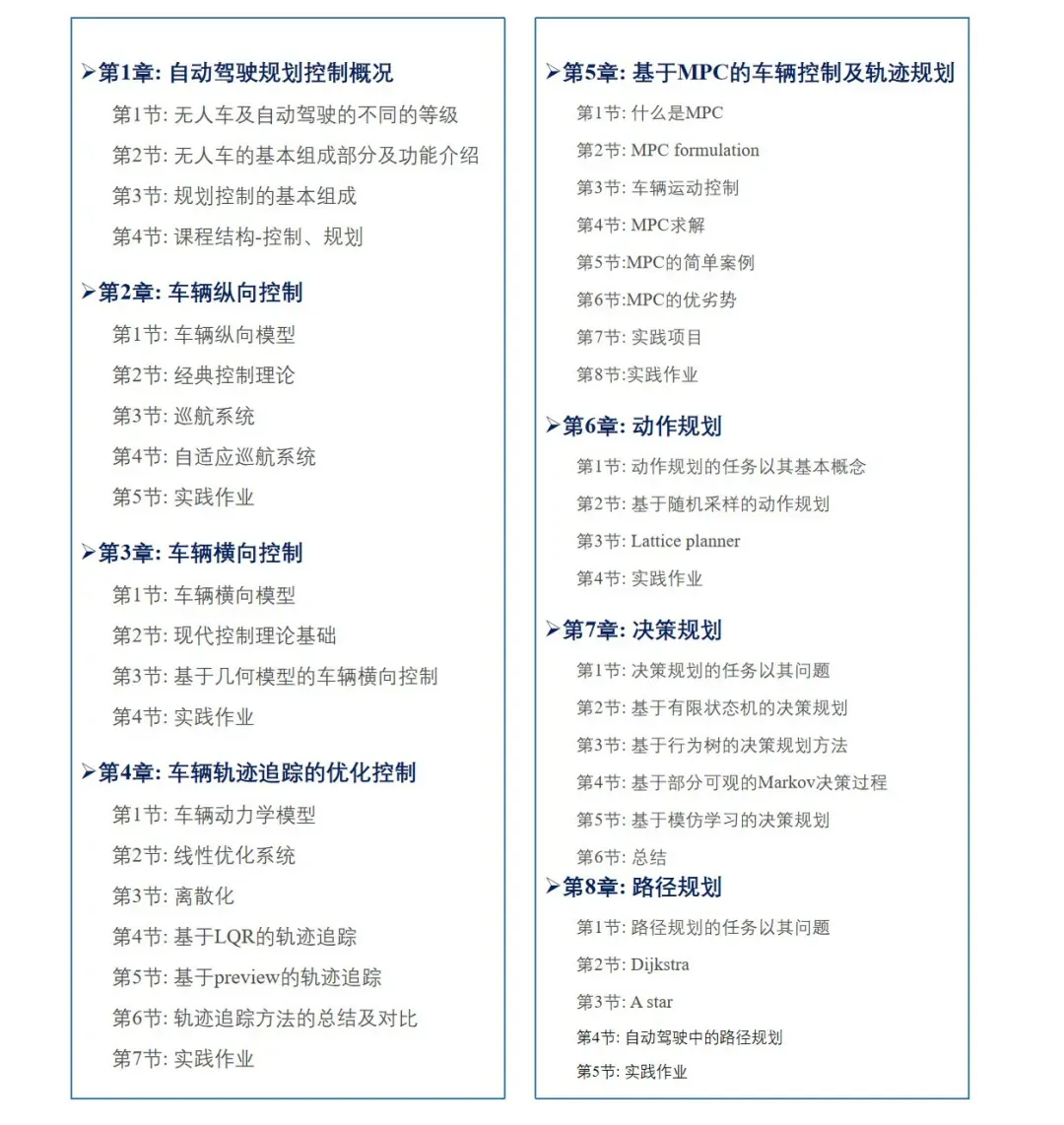
课程详细讲解了PID, LQR, MPC等自动驾驶常用的控制算法,以及动作规划、决策规划、路径规划等规控岗位必备的基础知识。同时配套了6个实践Project,教给大家如何将算法落地应用在自动驾驶场景中。本期课程还开设了讲师直播答疑环节,老师将会面对面解决同学们学习过程中遇到的各种困难。博士毕业于新加坡国立大学。具有10年以上机器人规划控制的研发经验,获得多项自动驾驶专利,并发表多篇机器人、自动驾驶论文。(局部轨迹规划算法lattice planner)1. 了解自动驾驶的规划控制在整个自动驾驶中的作用;2. 学会如何建立车辆几何模型、车辆运动学模型以及车辆动力学模型,如何对一些重要的参数进行辨识;3. 学会设计多种控制器(PID, LQR, MPC)去解决自动驾驶中的控制问题,提升车辆的轨迹追踪、自适应巡航等的性能;4. 学会如何通过有限状态机(Finite-state machine)在动态环境下规划出一条避开障碍物并符合车辆动力学的路径,如何在复杂环境下做出合理决策等。5. 掌握规划领域的Dijkstra,A*等路径规划的方法,运动规划的方法以及在不确定性条件下的规划问题。本课程从基础的车辆物理模型出发,通过对不同场景及应用下车辆模型的分析,详细阐述车辆控制学及路径规划的知识体系。通过将理论与实际车辆规划控制中的问题相结合,从而让大家达到融会贯通的效果。
1.希望从事自动驾驶规划控制研发的在校学生,尤其是机械、电子电气、计算机、自动化等专业的同学。2.已经在从事自动驾驶规划控制相关领域的研发工程师。3.自动驾驶或者机器人企业中其他方向的研发工程师,以及系统工程师。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
