2016年,埃隆·马斯克(Elon Musk)在特斯拉公司(Tesla)的发布会上说:“所有我们今天生产的汽车,都具备实现完全自动驾驶的硬件。”
那一刻,全球开始讨论算力、摄像头、神经网络。很少有人提到IMU。但当车辆在高速公路上自动变道、在隧道中保持稳定、在视觉受限时仍能维持轨迹,背后有一套更基础的能力:持续姿态估计。
这,就是MEMS的新边界。
自动驾驶不是“看见”,而是“保持连续”。
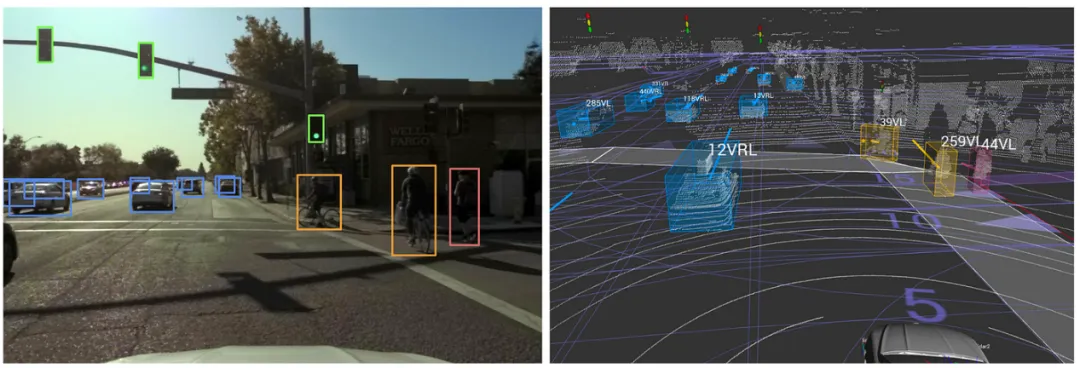
公众理解自动驾驶,往往聚焦摄像头。特斯拉选择纯视觉路线,强调端到端神经网络。但在工程逻辑上这是另一回事,视觉是离散帧,惯性系统是连续信号。当摄像头帧率下降,当环境光线变化,当GPS信号被遮挡,MEMS IMU提供毫秒级姿态更新。
在FSD系统内部,融合模块持续整合了摄像头视觉、轮速信息和高精度IMU数据。视觉告诉车辆看到什么,IMU告诉车辆自己正在如何移动。
这是完全不同的维度。
特斯拉FSD是算法飞跃背后的物理底座。
2020年之后,特斯拉FSD Beta逐步开放。其神经网络规模不断扩大,推理能力不断提升。但自动驾驶有一个工程铁律:神经网络再强,也必须依赖稳定的物理输入。
车辆姿态估计误差累积,会直接影响轨迹规划。在高速状态下,哪怕0.1度的持续误差,都会带来路径偏差。因此,IMU精度、温漂控制、长期稳定性,成为自动驾驶的基础条件。
这也是为什么自动驾驶等级提升,对IMU会提出更高要求。
从消费级到车规,是MEMS的一种2.0。
在手机里,IMU的漂移可以被用户忽略;在自动驾驶中,漂移就是风险。自动驾驶IMU需要更低零偏稳定性、更长时间无校准运行、更高动态范围,这推动MEMS进入“车规2.0时代”。
博世公司持续在车规MEMS上深耕,意法半导体强化汽车惯导解决方案。而中国企业,也正在参与这一进程。
上海矽睿在消费IMU领域积累规模能力之后,逐步向更高可靠性方向拓展。自动驾驶,将是一条长坡。
多传感融合是FSD的真实架构。
特斯拉FSD并非单一感知源。系统需要视觉定位、车辆动力学模型、IMU姿态解算和时间同步机制。IMU在其中承担“时间连续性基准”的角色。当视觉模型推断场景时,IMU提供高频运动补偿,这是融合算法的底层逻辑。
因此,自动驾驶不是摄像头对抗激光雷达,而是多传感融合的协同工程。
高端自动驾驶与无人系统领域,长期使用光纤陀螺与激光陀螺。但MEMS正在逼近。MEMS优势在于成本、尺寸和可规模复制。如果自动驾驶要真正普及,惯性系统必须具备量产可行性。
MEMS具备这个潜力。
当一辆新型智能汽车在城市道路上自动行驶,人们看到的是神经网络的决策能力。但在车体深处,一颗微小的硅梁,正在以高频率震动。它不显眼,却维持着方向。
自动驾驶改变交通结构;MEMS维持运动秩序。当车辆越来越聪明,硅梁正在进入新的时代。
这,就是MEMS的新边界。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
