在机器人/自动驾驶中,强化学习和SLAM哪个方向更有前景?
- 2026-03-17 20:11:58
在机器人/自动驾驶中,强化学习和SLAM哪个方向更有前景?如果是纯研究,其实RL和SLAM喜欢哪个,就选哪个。 但凡你要是出来上班,至少是两个都要懂的程度,建议考虑交叉领域,外面真的很卷。 如果说难度,我感觉SLAM要难点,主要是难在传感硬件要懂,实时性计算、系统集成这些。 RL也不是没难度,难点在于训练非常考验资源,资源不好主打枯坐。 调试堪比练仙丹,难度不低,极其考验耐心。 记得有次训练花了3个多月,每天睁眼就是调参,一坐到底,从早八调到凌晨两点,经常在电脑面前睡着了。。。还烧了两张卡和一台电脑:( 还有RL的迭代速度贼快,极其考验学习能力,学习能力既要强还要速度快,参考U盘即插即用。 如果看到这里,你觉得两者还是不好选,那么可以从机器人顶会IROS paper list来看, 由于官方都是公布汇总的接收率(比如投稿邮箱回复或者官网公布),无细分领域是不太好确认。 Github上有人爬了整个接收网站,并分类统计了下,数据是2022年IROS, 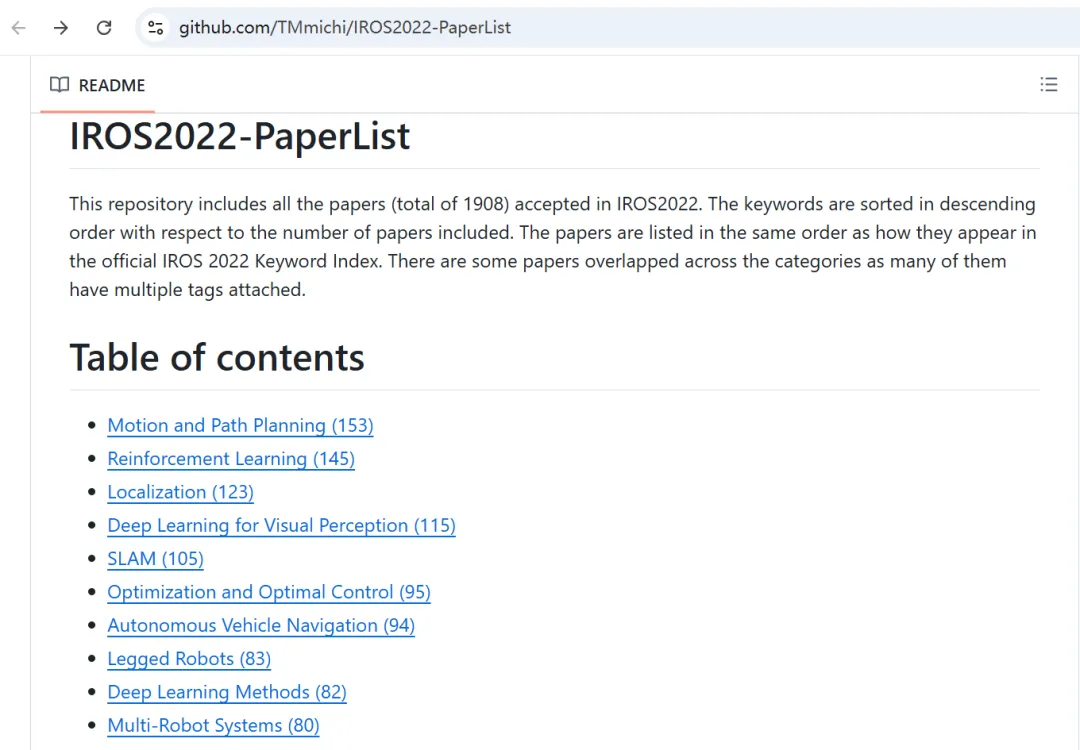
github.com/TMmichi/IROS2022-PaperList 图中RL是145篇,排名第二,SLAM排第五,105篇,还有个第三的定位,SLAM的核心是定位,123篇,所以,如果算上这个SLAM属于大热门了。有兴趣的小伙伴可以去仓库里瞅瞅。 再来瞅瞅RL和SLAM在工业界的应用方向, 再结合一个未来的应用趋势,做研究绝对不能埋头苦干,一定要竖着耳朵干活。 通常,学术速度要比产业要快1-3年,主要在于科研样本小,产业落地需要考虑商业价值。 所以结合两者的研究趋势和产业应用来看,两者都是随着机器人市场开始需求激增: 如果是两者交叉融合,可以关注下: 如果是想了解下SLAM的话,可以看看这篇经典款综述: A Survey of Simultaneous Localization and Mapping 
DOI:10.5081/jgps.17.1.94Corpus ID: 202558895 关于多智能体强化学习(MARL)在自动驾驶的研究,可以看这篇, Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey 
doi.org/10.48550/arXiv.2408.09675 综述:强化学习在 SLAM 中的应用情况 A Survey on Reinforcement Learning Applications in SLAM 
往期内容 特斯拉最新专利,可能是近年来最大突破之一 世界模型优于扩散策略50%以上?Yann LeCun团队成果上新了! Yann LeCun团队再上新,机器人看AI视频学习 YannLeCun又又上新了,潜在动作世界模型 为机器人量身定做,被李飞飞教授点赞过的生成式世界模型教程出炉~ 斯坦福李飞飞教授团队最新成果,3D物体流 斯坦福大学李飞飞团队新作,PointWorld 223篇ICLR Accept Oral为啥能成Top 1.1%?九大分类的研究趋势是啥?Oral高频标签是啥?ICLR2026总结篇 投7过6篇,高手策略通关?拼凑宏大叙事易被秒?关于Li Fei-Fei团队ICLR 2026过稿与拒稿原因学习与复盘 投7过5篇,得出ICLR偏好?基于世界模型的规划为啥被拒?基于Yann LeCun团队在ICLR 2026中的过稿与拒稿原因研究 ICLR 2026 Accept Oral具身智能论文总结,223篇选20篇,四大趋势,三个切入点,基于罗德里格斯公式的新神经网络架构?闭环世界模型? 从0开始打造人形腿(12DOF) YannLeCun聊具身智能AI|达沃斯论坛最新观点长文版 全球灵巧手盘点以及新趋势猜想 MIT与BCG,当前及3年后,各位将如何看待 AI 的角色? 什么机器人项目可以拥有27.8K颗星星?Github开源项目盘点 2025 Nature 生物技术与AI回顾,哪些可借鉴 面对AI即将取代程序员的工作,Andrej Karpathy大佬怎么想的? 你认为具身智能是通往AGI(通用人工智能)的必经之路吗?
SLAM
需要精确定位的场景有仓储 AGV、煤矿井下导航; 静态或半静态环境有工厂、商场、家庭服务机器人; 建图需求明确,比如测绘、AR 空间定位、自动驾驶感知。
RL
复杂决策问题像自动驾驶的变道超车、避障决策; 动态不确定环境,类似机器人在复杂地形自适应行走; 需要持续优化的系统,物流路径规划(类似无人物流车)。
SLAM 趋势
多模态融合,视觉 + 激光雷达 + IMU 等多传感器深度融合; 轻量化,比如向边缘设备和嵌入式系统优化; 语义 SLAM,建图,理解环境语义,提升决策能力。
RL 趋势
与大模型结合,比如具身大模型,提升泛化能力; 离线RL解决数据收集难题,加速落地; 端到端控制,从感知到决策的一体化学习框架。
SLAM的技术迭代没有RL快,基础刚需,只要有移动机器人或自动驾驶需求,就需要SLAM,相对来说,容易出成果; RL前沿领域,潜力大,多机器人协作RL、RL与大模型决策都是可以考虑的,通常需要更多资源和基础,如果以本科基础去做,仿真会好出成果一点,真机部署有点难度。
RL 优化 SLAM,通过RL改进探索策略和地图更新 SLAM 辅助 RL,提供准确的环境表征,加速学习收敛 未来思路,感知 (SLAM)、决策 (RL)、控制的闭环系统
doi.org/10.48550/arXiv.2408.14518
如果两个都要学,先SLAM再RL,最后再一起!
————
LLM智能超预期却笨得可爱?Andrej Karpathy大佬年度总结
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 全球SUV销冠!焕新价15.18万!丰田RAV4荣放双擎精英版限时权益
- 掀桌子了!豪华大五座SUV,本田冠道一口价16.98万,还要啥途观L?
- 北方车主必看!冬季新能源SUV续航大“照骗”?实测告诉你谁能安心开回家!
- 10万以内质量最好的6款SUV,99%的家庭买这6台车就足够了!
- 西安到兰州大型 SUV 托运 兰州到西安大型 SUV 安全直达
- 吉利这SUV才是“销冠王”!8.19W起,一个月狂卖3.4万辆,油耗6.8L
- 4万多就能买高颜值SUV?奇瑞这款代步神车,油耗低还好开,太香了!
- 宝马最美纯电轿跑SUV?全新iX4外观曝光,比特斯拉Model Y还香?
- 3月,这四款大六座SUV要公布价格了!
- 6.5万买SUV,油耗才6.5L!长安这车专为工薪族打造,太值了!
