引言:当方向盘后不再有眼睛
2025年的今天,L3级自动驾驶正在从技术演示走向规模化商用。这意味着在高速公路或低速拥堵场景下,驾驶员可以合法地将视线从道路上移开,浏览手机、处理工作甚至小憩片刻。然而,一个根本性的矛盾随之浮现:当人类不再需要时刻注视前方,汽车的大灯应该为谁而亮?
传统的照明哲学在这一刻失效了。过去一百年间,车灯的设计始终围绕“人眼”展开——照亮人眼需要看见的道路,避免对人眼造成眩目。但在自动驾驶状态中,车辆的“眼睛”不再是挡风玻璃后的生物瞳孔,而是遍布车身的摄像头、雷达和激光雷达。车灯照明由服务人的眼睛转变为服务于雷达摄像头的成像质量,这对自适应灯光技术提出了一系列全新的、更为严苛的要求。
本文将深入探讨在自动驾驶时代,自适应灯光技术需要具备的核心能力:从与智驾系统深度融合的精准控光,到作为“第二语言”的对外交互,再到支撑这一切实现的底层技术革命。
一、从“照亮道路”到“增强感知”:为机器而亮的光
在自动驾驶状态下,车辆的感知系统承担着全部的驾驶责任。然而,这些精密的电子传感器在恶劣光照条件下——如无照明路段的对向车眩光、突然的明暗变化、雨雪天气的光线散射——其性能会大幅下降。此时,自适应灯光的第一重使命,是成为感知系统的“增强配件”。
1. 高精ADB:从“避让车辆”到“描边障碍”
自适应远光灯(ADB,Adaptive Driving Beam)并非新技术,其核心原理是通过摄像头识别前方车辆,然后动态关闭或调暗照射到该区域的光束,避免造成眩目,同时保持其他区域的远光照明 。传统的ADB通常仅有几十颗LED分区,遮蔽区域是一个粗糙的“黑盒子”,且由于信号传输延迟,往往跟不上快速移动的目标,只能通过扩大遮蔽面积来弥补,反而牺牲了照明效果 。
而在自动驾驶时代,需求发生了质变。以华为乾崑推出的130万像素高精ADB为例,它实现了“厘米级”的光束控制 。这种精度的意义不仅在于避免眩目,更在于精准勾勒障碍物轮廓。当车辆在夜间高速行驶时,高精ADB可以像“描边大师”一样,精确地熄灭照射到前方车辆或行人的光线,同时让光线紧贴着障碍物的边缘穿过,最大限度地照亮周围路面 。
更重要的是,它必须与智驾系统共享“视觉”。传统的ADB依赖于独立的灯光传感器,而自动驾驶时代的ADB直接调用智驾系统的融合感知结果。例如,系统不仅能识别出前方是一辆车,还能判断它是静止的事故车还是移动的车辆,并据此决定遮蔽策略——对于静止的危险障碍,甚至可以通过灯光进行强调,而非单纯避让 。这种感知与执行的无缝闭环,是自动驾驶对灯光的第一要义。
2. 动态照明光毯:车道级的路径指引
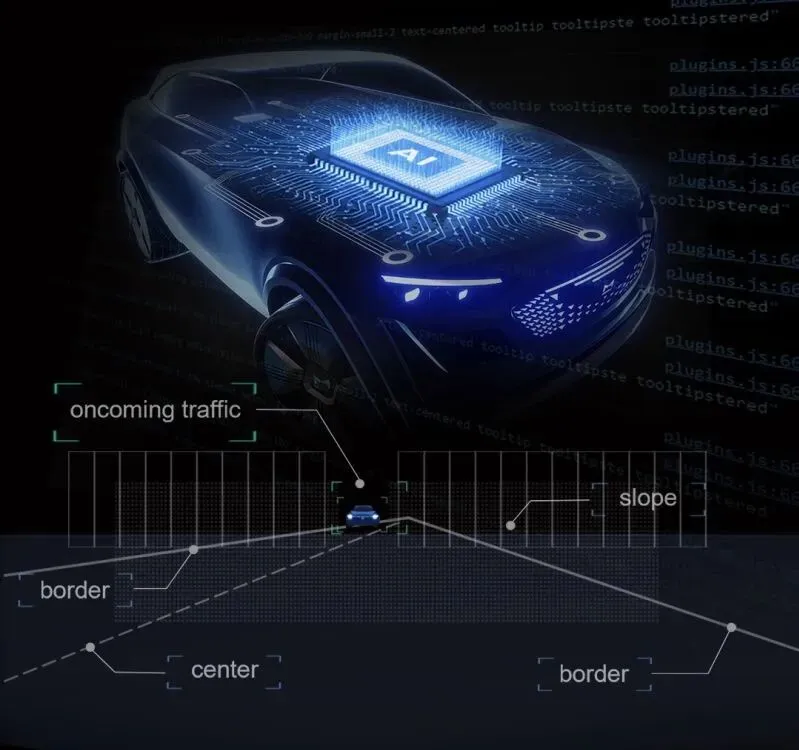
在自动驾驶状态,车辆按照规划好的轨迹行驶。灯光需要做的,是提前照亮这个即将驶入的区域。动态照明光毯技术应运而生:它会在车辆前方铺开一条与车身同宽的光毯,紧紧贴合车道线 。
但这在技术上极具挑战。路面并非总是一马平川,起伏的坡道会让投射的光毯变形。为此,最新的解决方案引入了“坡度补偿”功能——通过摄像头和雷达提前获取路面三维数据,实时调整投影形状,让光毯始终完美贴合实际车道,无论前方是拱桥还是凹陷 。这种预瞄式自适应调整,确保了机器视觉路径与人类视觉辅助的高度统一。
二、从“被看见”到“被理解”:作为第二语言的灯光交互
当车辆进入自动驾驶模式,它不再是一个被动的交通工具,而是一个主动的交通参与者。它需要与其他道路使用者——行人、非机动车、其他驾驶员——进行沟通。传统的转向灯和双闪已不足以表达自动驾驶系统复杂的意图。于是,车灯进化为“智能交互终端”,承担起对外表达的重任 。
1. 风险预警的具象化表达
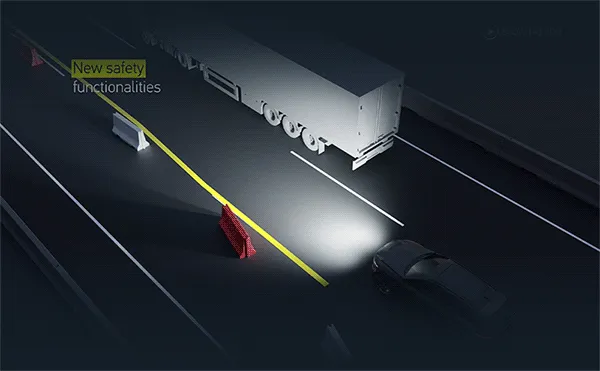
想象一个场景:自动驾驶车辆准备通过一个路口,此时侧面突然有行人或非机动车穿行,存在碰撞风险。传统的做法是车辆急刹车,用突兀的减速惊吓乘员和路人。而有了智能灯光交互,车辆会在路面上打出一道醒目的光束,直接“抓住”那个存在风险的行人,同时在地面上投射出警示符号 。这束光既是提醒路人“你已被发现”,也是向车内乘员(如果正在关注路况)解释“为什么我们要刹车”。
这种被称为Spotlight风险预警的功能,将抽象的算法决策转化为直观的视觉信号,极大地减少了人车之间的误解与冲突。华为提出的“车灯即语言”理念,正是基于此——让车灯传递那些无法用简单灯语表达的复杂信息 。
2. 窄道通行与社交礼仪
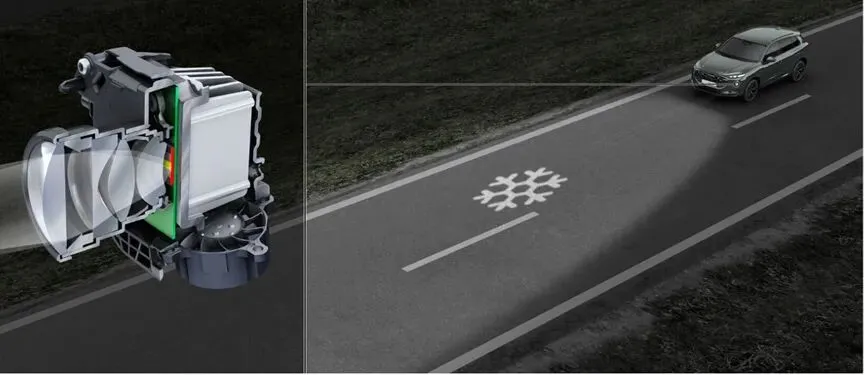
在狭窄道路上会车时,自动驾驶系统需要精准判断能否通过。虽然传感器可以计算出数据,但对于旁车的驾驶员或路边的行人,他们并不清楚这辆无人驾驶的车是否“看见”了自己。此时,智能车灯可以通过投影技术,在路面上投射出一条与车身等宽的光毯,告诉对方:“我的通过线在此,请放心。” 。
同样,在礼让行人时,除了停车,车灯可以在斑马线上投射出一条醒目的通道,或是一个“请通过”的友好符号。这种动态投影将冰冷的机器决策转化为具有温度的社交互动,构建了人机互信的基础 。
三、技术底座:像素化革命与系统级融合
实现上述功能,需要底层技术的根本性突破。自动驾驶所需的自适应灯光,不再是简单的“亮”与“灭”,而是可编程的、像素级的精准控制。
1. 光源技术的多元化演进
目前,实现像素化大灯主要有几条技术路线,它们各有千秋,共同支撑起不同层级的需求:
· 矩阵LED(Matrix LED):这是最基础的方案,通过排列数十颗至上百颗LED实现分区控制。优点是成本可控、技术成熟,适合实现基础的ADB功能,但像素数量有限,难以进行复杂投影 。
· DLP(数字光处理):基于DMD(数字微镜)芯片,利用数十万甚至上百万个微米级小镜子的翻转来控制光线的去向。这是目前实现百万级像素投影大灯的主流方案,能够投射复杂的图案、文字甚至视频,问界M9等车型采用的正是此技术 。其优势是高分辨率带来的无限创意可能,劣势是成本和体积相对较高。
· µAFS(可寻址像素矩阵LED):这是一种在芯片层面直接集成控制电路的技术,如欧司朗的EVIYOS,能在单个芯片上集成数万像素。它在体积、效率和明暗对比度(即防眩光效果)上具有显著优势,被认为是未来高像素、高效率智能大灯的重要方向 。
2. 打破壁垒的中央集中式架构
如果说像素化光源提供了“肌肉”,那么控制这些肌肉的“大脑”和“神经”则在于整车架构。传统供应链模式下,灯光系统由Tier 1供应商提供,智驾系统由另一家提供,信号在多个控制器之间传递,转译时产生的延迟高达数百毫秒,根本无法实现高速场景下的精准“跟枪” 。
自动驾驶时代的自适应灯光,必须采用中央集中式电子电气架构。像华为乾崑的做法那样,将车灯模组与智驾、座舱、底盘等系统纳入统一的通信协议和标定算法中。这样,智驾传感器识别到目标后,指令可以几乎无延时地直达灯光执行器,实现同步联动 。这种系统性创新,而非单一零部件升级,才是智能灯光发挥最大效能的根本保障。
有趣的是,这一趋势正由中国企业引领。2026年初,科博达获得奥迪“数字像素照明中央控制模块”的提名,标志着中国在智能照明核心控制领域已具备与国际巨头同步研发的能力,打破了长期以来由外资主导的高端供应链格局 。
四、趋势与展望:智光点亮未来出行
随着2025年全球自适应远光灯市场规模逼近50亿美元,并预计以超过22%的年复合增长率高速增长,智能灯光已不再是豪华车的点缀,而是安全出行的必需品 。
展望未来,自动驾驶状态的自适应灯光技术将向两个维度深化:
· 安全维度的升维:灯光将与主动安全深度融合,成为继碰撞安全和主动安全之后的“第三安全”支柱 。它将在夜间将驾驶员的视觉上限(识别距离)提升60%以上,大幅降低夜间高达60%的重大事故死亡率 。通过V2X通信,未来甚至可以实现“灯找车”——提前照亮视线盲区外的来车,实现超视距预警。
· 体验维度的拓展:当车辆完全自动驾驶时,座舱变为移动空间。灯光可以打破车的边界,与娱乐系统联动。例如,在停车场利用车灯投射出游戏界面,车身传感器捕捉用户的动作,将车周变成大型户外游戏场 。或者,在节日里为用户定制一场专属的灯光秀,让车灯成为个性化情感表达的面板 。
结语
自动驾驶状态时,我们需要的不再是一束单纯驱散黑暗的光,而是一束懂得思考、善于表达、能够预判的“智光”。它既要服务于机器,增强传感器在复杂环境下的感知能力;也要服务于人,与周围的世界建立基于信任的沟通。
从被动照明到主动交互,从功能部件到价值载体,自适应灯光技术正在经历一场深刻的“认知革命”。正如华为提出的愿景,车灯正在成为连接“人-车-环境”的关键纽带 。在这场视界的革命中,每一次像素级的精准点亮,都是在为我们通往更安全、更高效的自动驾驶未来铺路。





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
